果园自动巡检车底盘结构设计
2021-09-17 07:43河北农业大学机电工程学院刘泽楠王一猛付鑫宋云达王子晗
河北农机 2021年9期
河北农业大学机电工程学院 刘泽楠 王一猛 付鑫 宋云达 王子晗
引言
从目前发展的状况可以预知,2016~2026年是我国果园产业发展的黄金时期[1],果园的机械化程度不仅对水果产业发展有深远的影响,也对一个地区的农业机械化有着重要的影响[2]。目前我国北方农村的小型果园管理工作较落后,大部分巡检工作都是由人工完成,为解决北方山区小型果园的日常管理工作费时费力的问题,本文设计了一种果园自动巡检车,该车采用自控路径规划,能按路径规划和作业要求,精确地停靠到指定地点完成相应的果园巡检任务,节省了人力,提高了工作效率,此次设计是北方农村地区传统果园管理走向机械化、智能化管理的初步探索。
1 整体设计及参数选择
1.1 整车结构选型与设计
通过三维建模软件对巡检车各部分进行设计和建模,然后分别将设计好的各部件按其之间的配合逻辑关系进行装配组合,生成自动果园巡检车的整车的三维模型如图1所示:
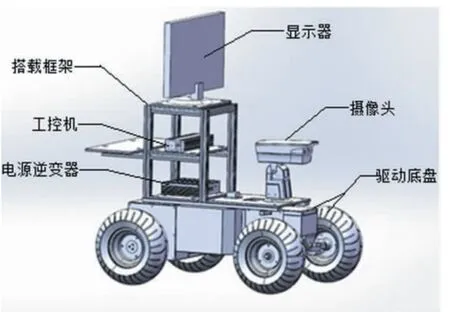
图1 巡检车整车三维模型
根据自动果园巡检车的工作环境和已确定的基本参数进行各总成选型如下:动力系统采用24V175W直流电机模型小、寿命长且效率高,可提高巡检车的质量,扭矩较大使其在果园路面的通过能力增强;将IMU惯性导航模块安置在控制平台的纵向轴线上,获取机器的运动姿态和坐标;出于工作需求的考虑,采用IPC工业工控机作为控制平台的总控和信号处理;选用涡轮蜗杆式光电摄像头,可进行多方向上的仰角和俯角多角度拍摄;显示器采用普通电脑液晶屏来显示小车位置信息和IMU所传输的解算后姿态信息,便于操作者对巡检车控制平台位置的把握和路径的选择和控制;由于巡检车各部分组件所需工作电压不同,因此采用了24V-220V的电源转换器。搭载框架采取结构式设计,由30*30的12根铝合金结构件通过角码配螺栓固连接而成,铝合金质量轻且密封性良好,耐腐蚀较强可以很好地保护内部的电器元件,且因所需承载总质量不大,亦可满足强度要求。
1.2 整车的各项参数设计
尺寸和质量参数:轴距和轮距的尺寸选择对巡检车底盘空间、巡检车的最小转弯半径以及整车整备质量均有影响[3]。为加强整体的携载能力和行驶性能,兼顾巡检车底盘能够自如通过果园地形同时平台底盘空间足够,将轴距定在680mm,前、后轮距的尺寸选为440mm。为保证巡检车底盘在起伏地势的通过性,将底盘最小离地间距设计为158mm。选用铝合金结构件和板材以及角码螺栓联接的固连方式,来减轻车身重量,将平台底盘的质量定为50Kg,搭载装备的质量为20Kg,总质量为70Kg。巡检车底盘的尺寸参数和质量参数所示如下表所示:
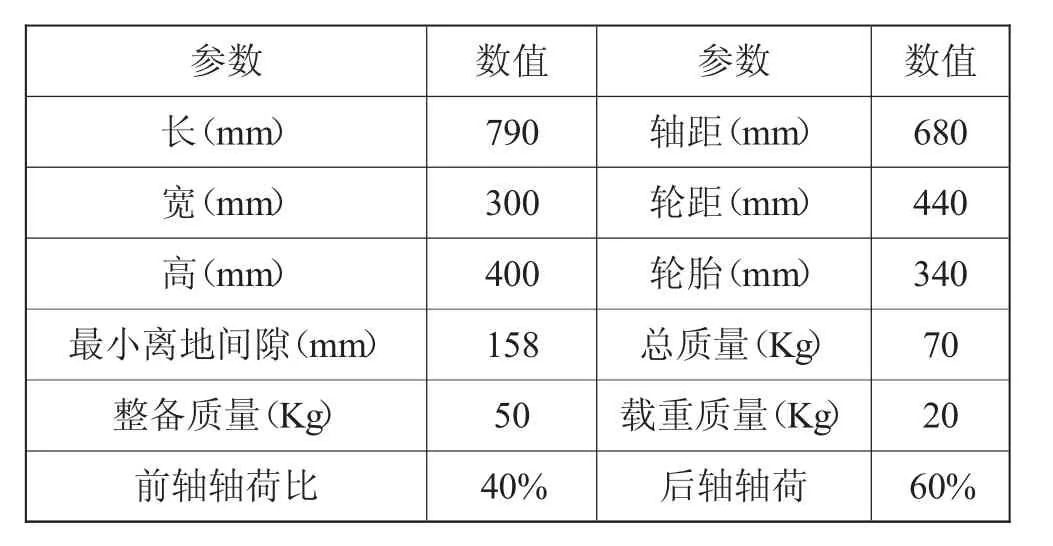
表1 巡检车底盘的主要尺寸参数
性能参数:为确保工作时的安全性和可通过性,将控底盘轴荷分配定为前40%,后60%。为保证巡检车的安全性,设计最高车速vamax为10km/h。考虑果树种植间距并尽可能减小转弯半径,将最小转弯半径Rmin设计为2m,并选取相应合适的内倾角使得转向轮自动回正。巡检车工作时速度较慢,对制动性要求不大,要求制动距离不超过4m,平均制动减速不低于0.96m/s2。
1.3 小车导航系统及厘米级定位的实现
单一的传感器定位都存在一定的不足和缺陷,其中Tuff导航系统定位精度较高,但是会因卫星信号被遮挡出现定位不稳定的情况,而惯性导航的优点在于全天候使用并且完全自主,不受外界环境干扰,连续性强,噪声低[4],但其导航误差会随时间累积,定位精度降低。因此二者的组合导航可以优势互补,为小车提供准确可靠的厘米级定位。
系统自带差分基站,可提供长时有效的差分信号,保证位置精度小于2.5cm,姿态精度小于1°,其实现过程是使用者遥控巡检车巡检果园,控制平台走过并记录相关的巡检路径,小车进行自控导航时,由惯性导航按照之前的路径输出行驶姿态信息,并由Tuff导航差分定位实时获得小车行进中的坐标信号,卡尔曼滤波对系统的状态(位置、速度等)及误差进行最优估计,以实现对惯导系统的校准和误差补偿,从而达到厘米级定位的自控路径巡检,其运行模式如图2所示:
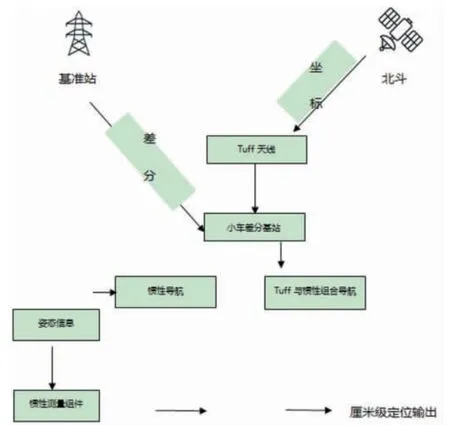
图2 组合导航模式图
2 .巡检车用电设备功率设计及校核
自动果园巡检车控制平台以控制系统为主,除以控制平台整体需求为根本,还应有一定的功率储备[5]。本节通过计算控制平台的功率等参数来评估此巡检车的合理性。
2.1 控制平台各用电设备的功率设计
当各电器设备正常工作时,大部分电器功率稳定,虽有部分设备,如北斗导航系统模块,功率值在接发射信号波动较大,但因平台所搭载的设备较少,而且考虑到一定的功率储备,因此可对波动功率忽略不计,分析并实验得到自动果园巡检车的各用电设备功率和电流如表:
2.2 巡检车巡航里程及功率校核
巡航里程校核:用电设备较少,且大部分处于同时工作的状态,因此使用频度系数(K0)可视为1。各用电设备的等效电流:Idi=KoiIi。由于Idi=I,又由表2知电器设备的用电量,得总用电量为:I=16.09(A)。

表2 巡检车各用电器设备功率
小车用电设备分别采用锂电池(24V180AH的车载锂电池一块)、蓄电池充电,计算:

式中Q—蓄电池的容量(AH) k—安全系数
I—用电设备的等效电流(A) T—续航小时数(h)
t—所处环境的实际温度(℃) α—电池温度系数(1/℃)
η—放电容量系数
根据续航设计预测η取1,α取0.008/℃,因果园巡检任务最繁重时为盛夏,故取t为30℃。取k为1.25,可得T为:

可知小车充电一次的持续放电时间为9.3h,小车设计速度为10km/h,可估算出小车的续航里程约为90km,因此续航里程足够日常巡检。
式中:Q—蓄电池的容量(AH) U—放电电压
T—持续放电时间(h)
又由表可知,全部用电器用电功率P总=441.6W
P=464.5W>P总=441.6W
可知蓄电池输出功率可以负载各用电设备。
3 总结
本文就如何解决果园智能化管理的问题,提出了自动果园巡检车的设计方法,其中包括整体设计,各部分选型布置及建模处理,厘米级定位的实现,功率设备计算及核验,通过实验测试小车满足了相关的设计要求,符合了果园日常管理的需求,使果园巡检变得方便省时,解放了劳动力,推动了智能化农业。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年9期)2022-05-20
少先队活动(2021年6期)2021-07-22
快乐语文(2020年36期)2021-01-14
小学生必读(中年级版)(2018年10期)2019-01-04
文苑(2018年22期)2018-11-19
新少年(2017年1期)2017-03-15
学苑创造·A版(2016年5期)2016-06-21
人民交通(2009年2期)2009-03-04