
变步长电导增量法在光伏系统最大功率点跟踪的应用研究
2021-09-17 04:08赵晓亮孟庆端
中国设备工程 2021年17期
赵晓亮,孟庆端
(河南科技大学电气工程学院,河南 洛阳 471023)
光伏发电系统中的光伏电池作为能量供给单元,其功率输出随着温度和光照强度的变化而变化,在某一工作环境下,其功率输出有唯一的最大值。为充分利用光伏电池的能效,需要对光伏电池的最大功率输出点进行实时调控,使其尽可能稳定工作在最大功率点附近,这就是光伏发电系统最大功率点跟踪技术(maximum power point tracking,MPPT)。
目前常用的MPPT 方法有恒定电压法,扰动观测法和电导增量法。恒定电压法具有控制简单,追踪速度快,但不适于温度突变的情况;扰动观测法结构简单,参数使用较少,但存在追踪速度和精度的自有矛盾,并且在光照强度发生突变时,系统会产生误判和扰动;电导增量法则可以迅速响应光照强度的变化,并且具有较高的控制精度,但存在追踪步长选择无法兼顾追踪速度和稳定精度的问题。本文提出了一种变步长电导增量法,用来缓和最大功率点追踪的速度和稳定精度的矛盾。通过MATLAB/Simulink 仿真,结果表明,提出的变步长电导增量法在外界条件发生突变时,可以快速准确地追踪到最大功率点,并保证追踪速度和稳定精度。
1 光伏系统的MPPT 原理
在光伏发电系统中,光伏电池的输出功率和光照强度、环境温度存在非线性关系,光伏电池的输出特性是指在温度恒定的前提下,对应于某一光照强度,随着输出电压的增加,光伏电池的输出功率也随之增大,当电压增大到某一数值时,输出功率达到最大值,此处为最大功率点处,之后输出功率随着电压增大开始减小。在光照恒定的前提下,对应于某一温度,电流开始基本保持不变,当电压增大到某一数值时,电流会出现急剧下降。
光伏MPPT 系统主要有光伏阵列、DC/DC 变换电路、MPPT 控制器组成。基于Boost 电路的光伏MPPT 系统如图1所示。当系统的负载与电源内阻相等时,负载得到最大功率。在光伏发电系统中,在光伏组件和负载之间串联一个DC/DC变换电路,等效为一个外部负载。MPPT 控制器根据采集的输出电压和电流通过MPPT 控制算法来调整开关管占空比,将信号送至PWM 发生器,输出相应的脉冲信号来控制开关管的通断,实现最大功率点的跟踪控制。
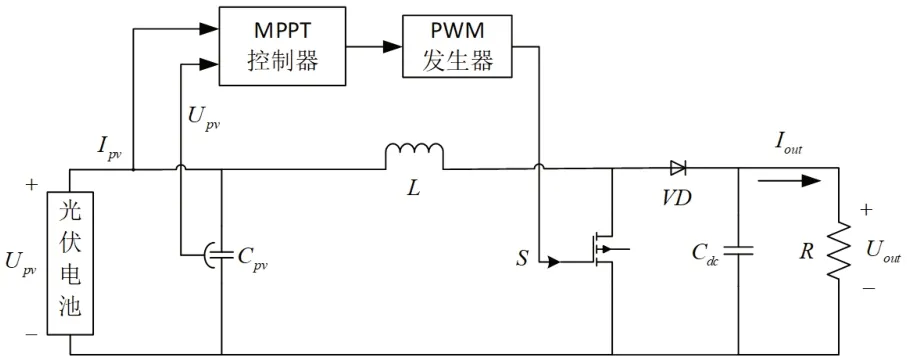
图1 基于BOOST 电路实现光伏MPPT 的原理图
1.1 传统的电导增量法
电导增量法是通过改变电池阵列输出电流和电压的变化率来实现输出功率的最大化。设电池阵列的输出功率P=UI,其中U、I 分别为输出电压和输出电流,此时等式两边对电压U 求导,可得

此时,可分为三种情况:当dP/dU 大于0 时,光伏组件工作点在最大功率点左侧,需要增加扰动,增大输出电压;当dP/dU 等于0 时,光伏组件输出功率最大,工作于最大功率点处,应停止扰动,当dP/dU 小于0 时,此时,光伏组件工作点在最大功率点右侧,应减小扰动,输出控制信号。
传统的电导增量法采用的是固定步长扰动,若步长选取过小,虽然追踪精度会提升,同时追踪速度较慢;若步长选择过大,虽然追踪速度加快,但是,不能保证追踪的精度,会加大最大功率追踪过程中的波动,造成能量损失。
1.2 基于步长动态对比的变步长电导增量法
为解决传统的电导增量法在追踪速度和稳定精度之间的矛盾,本文提出了基于步长动态对比的一种变步长电导增量法,其思路是在用大步长保证追踪速度到最大功率点附近时,改用小步长进行追踪,从而降低在最大功率点附近的波动。根据光伏电池功率输出的P-U 曲线可知,当曲线上的点越来越靠近最大功率点时,曲线的斜率越来越小,当曲线斜率为0 时,此时,光伏电池的工作点在最大功率点处,因此,本文将扰动步长设为曲线斜率,在扰动过程中增加动态比较环节,让实时斜率与定步长进行实时比较,将比较后较小的值输出作为动态扰动步长,进行最大功率点动态追踪。
1.3 仿真分析
在MATLAB/SIMULINK 平台上搭建两种算法的光伏发电MPPT 仿真模型,仿真初始状态在光照强度1000W/m²,温度为25℃条件下,在0.45s 时光照条件从1000W/m²突然降至800W/m²。两种电导增量法的仿真结果如图2 所示。
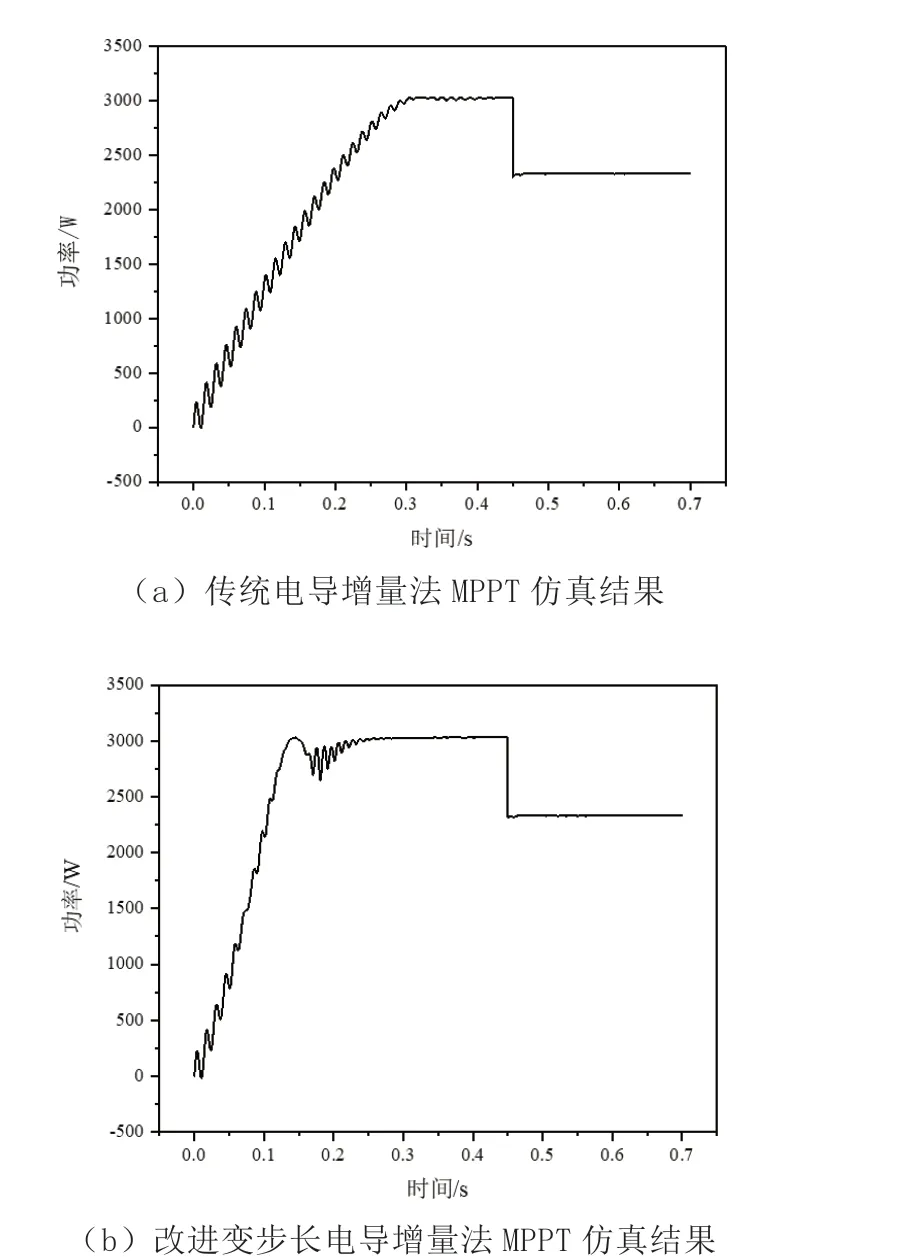
图2 两种电导增量法MPPT 仿真结果
由图2(a)可知,采用传统的电导增量法在0.32s 左右光伏系统追踪到最大功率点时,系统进入了稳定状态,此时,稳态最大功率为3033.2W,稳态最小功率为3003.5W,稳态波动差值为26.7W,稳态震荡率为0.89%,在0.45s 时光照强度发生了突变,可以看出光伏系统的输出功率随着光照强度的变化而产生相应变化,系统在0.46s 左右系统进入了稳定状态,此时稳态最大功率为2333.3W,稳态最小功率为2319.1W,稳态波动差值为14.2W,稳态震荡率为0.61%,可知采用传统的电导增量法在光伏系统最大功率点跟踪时,光伏阵列输出功率有较大的波动。
在相同条件下,对改进的变步长电导增量法仿真模型进行仿真,仿真结果如图2(b)所示,采用变步长电导增量法的最大功率点追踪过程更加平稳,在0.27s 左右系统追踪到最大功率点,系统进入了稳定状态,此时,稳态最大功率为3030.1W,稳态最小功率为3019.1W,稳态波动差值为11.0W,稳态震荡率为0.36%,在0.45s 时光照强度发生了突变,同样在0.46s 左右系统进入了稳定状态时,稳态最大功率为2333.2W,稳态最小功率为2329.1W,稳态波动差值为4.1W,稳态震荡率为0.17%;两种电导增量法的仿真对比如图8 所示,可知改进的变步长电导增量法在进行最大功率点跟踪时,在保证追踪速度的同时,还能够有效地减少光伏阵列输出功率波动。
2 结语
本文在传统电导增量法的基础上提出了一种基于步长动态对比的变步长电导增量法,通过仿真结果对比,表明改进的算法在进行光伏阵列最大功率点追踪时,不仅可以保证追踪速度,还能降低在追踪过程中光伏阵列输出功率波动,有效地改善了传统电导增量法在追踪速度和稳定精度之间的矛盾。
猜你喜欢
当代陕西(2022年6期)2022-04-19
中学生数理化·中考版(2019年9期)2019-11-25
电子制作(2018年14期)2018-08-21
电信科学(2016年9期)2016-06-15
电测与仪表(2016年20期)2016-04-11
西南医科大学学报(2016年4期)2016-01-03
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年11期)2015-04-09
电子设计工程(2015年16期)2015-02-27
中国药业(2014年21期)2014-05-26
