基于FPGA的列车定位系统静态测试平台
2021-09-17 01:43王兴海
交通科技与管理 2021年28期
关键词:轨道交通
摘 要:轨道交通领域中,当列车定位系统进行静态测试的时候都是通过手动调节信标的位置结合观察天线发射功率的方式来进行调试的。这样的方式不仅精确度差,耗时长、效率低,而且浪费人力、物力。本文针对这些问题,对列车定位系统静态测试需求进行了分析,并且通过FPGA的方式实现了列车定位系统静态测试平台的设计。最后对该平台的设计进行了总结和展望。
关键词:定位系统;静态测试;轨道交通
中图分类号:U283.4 文献标识码:A
0 引言
列车定位系统可以实时准确的确定列车在线路中的位置是轨道交通行车安全和指挥系统中的一项关键技术。
采用查询应答器的方式来对列车进行定位是轨道交通领域比较常用的做法。
查询应答器系统主要由三部分组成,即查询应答器子架,查询应答器天线以及轨旁信标。查询应答器子架发射功率给查询应答器天线用以激活轨旁信标,并接收轨旁信标的数据,最终传输给信号系统的主处理器单元用于列车定位功能使用。
1 背景介绍
信标是安裝在线路沿线反应线路绝对位置的物理标志。信标分为有源信标和无源信标两种,有源信标可以实现车地的双向通信,无源信标在列车经过信标所在位置时,车载天线发射的电磁波激励信标工作,并传递绝对位置信息给列车。
每个信标都有固定的编码,列车通过识别信标的数据并结合车载电子地图和速传传感器等用以实现列车定位,校验列车轮径等功能。
当前轨道交通领域中,在列车定位系统进行静态测试的时候通常是通过手动调节信标的位置结合观察天线发射功率的方式来进行调试的。这样的方式精确度差,耗时长、效率低。
2 需求分析
天线安装在转向架上,沿着车辆的纵向轴方向。通过六个螺栓安装在车辆转向架的支架上,要求安装面的平面度在+/-0.5 mm范围内。天线设置在距离信标金属底板300 mm,误差为+/-3 mm的高度。
天线是安装在车辆的转向架上的,每次天线安装后,都需要使用信标手动扫过天线下方的有效区域,来判断天线是否安装到位。由于天线底面与信标的金属底板要求距离为300 mm+/-3 mm,手动划过的时候,信标与天线之间的距离无法保证。
3 方案设计
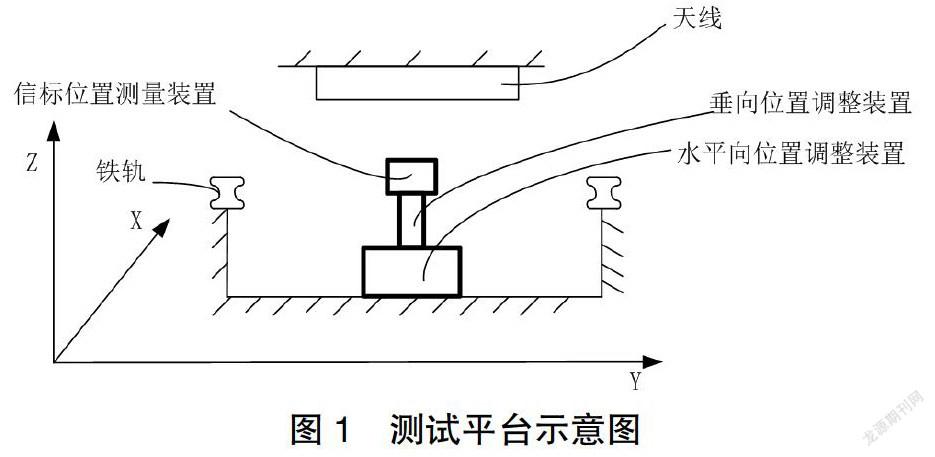
根据上述需求,列车定位系统静态测试装置,包括:位于上方的天线安装平面、位于下方并且设有轨道地平面的轨道、安装于天线安装平面的天线、信标位置测量控制单元、信标垂向位置调整单元和信标平面位置调整单元。
信标位置测量控制单元搭载有信标,用于探测信标相对天线的位置数据,根据位置数据计算识别出信标的当前位置,然后根据当前位置及目标位置规划出信标移动轨迹,再根据信标移动轨迹输出垂直移动指令给信标垂向位置调整单元,以及输出平面移动指令给信标平面位置调整单元。所述的位置数据为坐标系中各个点的坐标,以下所述的位置同理指各点坐标。
设定坐标系:设与轨道6平行的方向为X方向;根据笛卡尔坐标系,与轨道地平面平行,且垂直于X方向的方向为Y方向;垂直于X方向和Y方向组成平面的方向为Z方向。所以,上述的垂直方向为Z方向;上述的水平方向包括X方向和Y方向。
信标垂向位置调整单元固定连接在信标位置测量控制单元的底部,根据垂直移动指令控制信标位置测量控制单元沿垂直方向运动。
信标平面位置调整单元定连接在信标垂向位置调整单元的底部,根据平面移动指令在轨道地平面上沿水平方向运动,从而带动信标垂向位置调整单元和信标位置测量控制单元水平移动。从而通过信标的自动移动来实现列车定位系统静态测试的自动化。
信标位置测量控制单元包括:用于固定信标的信标固定装置、三个信标位置传感器和信标位置控制装置。
三个信标位置传感器用于测量信标相对天线的位置数据,至少三个信标位置传感器分别安装在信标固定装置朝向天线的一侧、信标固定装置朝向轨道地平面的一侧以及信标固定装置的侧面。
信标固定装置固定连接信标位置控制装置。信标位置控制装置根据信标相对天线的位置数据,根据位置数据计算识别出信标的当前位置,然后根据当前位置以及目标位置,计算规划出信标移动轨迹,并根据信标移动轨迹输出垂直移动指令或者平面移动指令。其中,通过平面拟合方程计算信标的当前位置。
测试平台的测试流程,信标位置测量控制单元测量信标相对天线的位置数据。信标位置测量控制单元根据信标相对天线的位置数据,计算识别出信标的当前位置,判断信标是否移动到目标位置,若否,信标位置测量控制单元控制信标平面位置调整单元和信标垂向位置调整单元继续运动,直至到达目标位置。信标位置测量控制单元在天线反馈的场强达到预设值时,开始扫信标。信标位置测量控制单元控制信标平面位置调整单元和信标垂向位置调整单元移动到X方向的边缘位置,然后沿X方向移动并记录移动轨迹数据,保存到信标位置测量控制单元。
4 详细设计
根据设计方案,对测试平台进行设计。信标位置测试单元,采用传感器+控制器的形式来实现,传感器采用基恩士的LK-G400传感器这款传感器可以测量的范围400 mm
±100 mm,重复精度可以达到2 um,线性度可以达到±0.05% F.S.(F.S.=200 mm)。控制器使用FPGA来实现,选用Intel公司的Cyclone10LP系列的10CL006,该FPGA具有6 272个LE,Memory Capacity 270Kb、2个PLL、20个clock,Maximum I/O 176个,Maximum LVDS 65个。可以满足信标位置测试装置的使用。
FPGA代码采用Verilog HDL的形式进行编写,Verilog HDL是一种硬件描述语言,用于从算法级、RTL级、门级到开关级的多种抽象设计层次的数字系统建模。被建模的数字系统对象的复杂性可介于简单的门级和完整的电子数字系统之间。
电路设计方面,选用ADI公司的AD7634作为AD输入,AD7634是一款18位、电荷再分配、逐次逼近型(SAR)架构模数转换器(ADC),采用ADI公司的iCMOS高电压工艺制造。该器件的输入范围和工作模式可通过硬件或专用只写串行配置端口来配置。AD7634内置一个18位高速采样ADC、一个内部转换时钟、一个内部基准电压源(和缓冲)、纠错电路,以及串行和并行系统接口端口。在CNVST的下降沿,对IN+和IN-上的全差分模拟输入进行采样。AD7634具有四种不同的模拟输入范围,功耗与吞吐量呈线性比例关系,工作温度范围为-40℃至+85℃。DA选用TI公司的DAC6571芯片,DAC6571是一种低功耗、单通道、10位缓冲电压输出数模转换器其片上精密输出放大器允许要实现轨到轨的输出摆动。DAC6571采用I2C兼容的两线串行接口在同一数据总线上,以高达3.4 MBPS的时钟速率工作,地址支持最多两个DAC6571的单调设计。DAC的输出电压范围为0 V至VDD。DAC6571包含一个上电复位电路,确保DAC输出在0 V时通电,并保持在那里,直到對设备进行有效写入。DAC6571包含一个通过内部控制寄存器访问的掉电功能,可在5 V时将设备的电流消耗降低到50 nA。该部件在正常工作时的低功耗使其非常适合便携式电池供电设备。在VDD=5 V时功耗小于0.7 mW,在掉电模式下降低到1 mW。适用于闭环伺服控制。
垂向位置调整单元,使用垂向电机模组+步进电机驱动器的方式来实现。垂向电机模组采用的是CBX单线轨直线导轨配57电机,型号是SGX滚珠丝杆单线轨滑台,行程为100 mm。电机驱动器选用DM860型两相混合式步进电机驱动器。
水平位置调整单元,使用水平电机模组+伺服电机驱动器的方式来实现。水平电机模组选用HIWIN公司的PG型式定位型直线导轨产品PGHW30HA1/2T1600ZAPI/II/E2+KK+03+S+A11+S32,行程为1 600 mm。电机驱动器选用伺服电机驱动器。
5 结论与展望
本文通过对列车定位系统静态测试的需求进行分析,设计出了列车定位系统的静态测试平台,实现了对采用信标定位方式的列车定位系统的静态测试,提高了列车定位系统的调试效率,降低了列车定位系统在安装调试期间的成本。为轨道交通信号系统后续的信息化、自动化提供了有力的支撑。
参考文献:
[1]刘进,吴汶麒.轨道交通列车定位技术[J].城市轨道交通研究,2001(1):30-34.
[2]肖建,李治,李群湛.关于列车定位系统的探讨[J].铁道学报,1995,17(增刊):22-26.
[3]陈新,周俊,林必毅.地铁列车定位技术的研究[J].微计算机信息,2009(24):117-118.
[4]孙林祥,房坚.城市轨道交通的列车定位技术[J].电子工程师,2002(7):28-30.
作者简介:王兴海(1984-),男,辽宁抚顺人,硕士,工程师,研究方向:自动化测量、自动控制、轨道交通信号系统领域。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
客联(2021年3期)2021-09-10
电子乐园·中旬刊(2021年6期)2021-05-16
科学与财富(2021年33期)2021-05-10
科学与财富(2021年33期)2021-05-10
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
科学与生活(2021年15期)2021-01-14
西部交通科技(2021年9期)2021-01-11
智富时代(2018年5期)2018-07-18