一种新的四轮独立驱动电动汽车横摆稳定性控制策略
2021-09-22 20:12谭琳
科技研究 2021年22期
关键词:电动汽车
谭琳





摘要:在四轮独立驱动电动汽车行驶中,可通过横摆稳定性控制方法对车身横摆姿态进行调整以减少车辆侧滑、甩尾等危险情况的出现。以某四轮轮边驱动电动客车为对象,分析了二、三自由度车辆参考模型各自的特点,在横摆稳定性控制方法中设计了复合理想车辆参考模型及其选择方法,提出了将理想参考模型与动态面滑模控制相结合的滑模防抖振控制方法。针对所提方法,建立了基于Matlab/Simulink和TruckSim联合仿真模型,参考国外FMVSS 136标准,进行了多个条件下的双移线试验工况仿真试验和分析。结果表明,基于复合理想车辆参考模型和防抖滑模控制的横摆稳定性控制方法能够实现高低附着路面和高低速度下车辆稳定性的有效控制。
关键词:车辆参考模型;四轮驅动;电动汽车;横摆稳定控制
中图分类号:U461.1 DOI:20180635
随着汽车主动安全技术的不断发展,车身电子稳定性控制系统(ESP)逐渐被推广。对于四轮独立驱动电动汽车而言,由于其车轮驱动转矩独立可控,因此可以通差动驱动实现车辆横摆稳定性控制。但控制方法或策略如果运用不当反而会导致车辆受损甚至发生危险情况。
车辆横摆稳定性控制算法,国内外学者也进行了大量相关研究。亚琴[1]人通过相平面分析提出了汽车横摆稳定性控制方法,施继忠[2]等人对滑模控制算法在车辆状态跟踪上的应用进行了研究,熊璐[3-4]等人对极限工况下车辆行驶的稳定性判据进行了研究,同时提出了基于纵向力分配的轮边驱动电动汽车稳定性控制方法,欧健[5]等人在横摆稳定性控制的基础上研究了防侧翻控制策略,王成[6]、Wenbo Chu[7]、Song Dandan[8]、Fei Liu[9]、Hamzah[10]等人研究的车辆横摆稳定性控制算法中都以线性二自由度车辆模型作为参考模型。日本学者Naoki Ando[11]和Hiroshi Fujimoto[12]等人提出了基于轮胎侧向力传感器的轮毂电机驱动电动汽车横向稳定性控制方法以及具有主动前后转向和四轮驱动/制动力分配的电动车辆的最佳横摆角控制方法等。C.I.Chatzikomis· K.N.Spentzas[13]等人对配备电子稳定控制(ESC)的车辆与带有四轮转向(4WS)的车辆进行了比较。
目前提出的横摆稳定控制方法中,主要以线性二自由度车辆模型作为参考模型,且控制方法说明不是较完整。本文提出一种以理想二、三自由度复合车辆参考模型为基础,集成改进动态面滑模变结构控制和按载荷分配转矩的横摆稳定性控制方法,并进行仿真验证。
1理想车辆参考模型
目前的车辆横摆稳定性控制算法主要是依据理想车辆参考模型,进而实时调整车轮制/驱动力来跟踪理想的车身姿态。其参考模型多数采用了二自由度车辆模型[5-10],但是由于其做了较多简化,在匀速、低速、小转向等接近稳态情况下时可以根据驾驶员意图比较准确的估算出车辆的侧向及横摆状态参数,而在车速变化比较快、转向角较大等极限工况下,该模型的估计与实际车辆状态差距较大,导致控制难度大大增加,甚至可能出现失控危险。
2.1基于复合参考模型的横摆角速度目标值的确定
在低速小转向时,二自由度模型能够较接近地反映实车运行中横摆角速度的情况,而高速大转向时扩展三自由度模型可以较接近地反映实际横摆角速度的情况。因此提出基于复合参考模型的车辆横摆稳定性控制算法,通过判断当前车辆的车速及方向盘转角的大小来自动选择二自由度或者扩展三自由度车辆模型作为控制算法的参考模型,从而确定横摆角速度的目标值。其判断条件如下:
当满足以上条件时选择三自由度车辆模型为参考模型,否则选择扩展三自由度车辆模型为参考模型。其中δw为方向盘转角,μ为路面附着系数,vT、δT、μT分别为车速、方向盘转角及路面附着系数的设定值,由试验标定确定。
2.2滑模控制算法
基于滑膜变结构控制在非线性系统控制中的优良鲁棒性、滑动模态的可设计性及无需系统在线辨识等优点,采用改进动态面滑模变结构控制方法,该改进方法采用动态面滑模控制与趋近律相结合,并结合函数代替的方法对滑模抖振进行消除改进[6]。
2.3横摆力矩分配
直接横摆力矩分配方法主要包括:平均分配法、I曲线分配法、驱动系统效率最高分配法、路面附着消耗最小分配法、前后轮同时达到附着极限分配法。本文采用按照各车轮垂直载荷所占比例的方法进行分配[5],此方法轮胎附着力利用率高。
3 仿真试验与分析
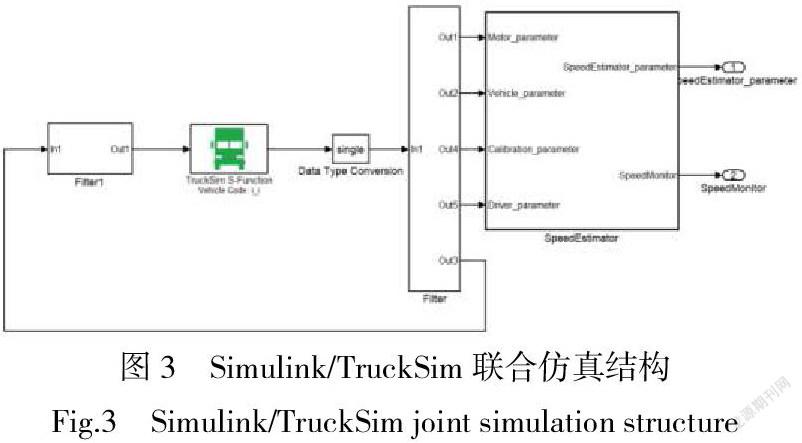
为了说明前述方法,以某四轮轮边驱动电动客车为研究对象,基于Simulink/TruckSim建立联合仿真试验平台进行验证,其结构如图3所示。
联合仿真模型中,在TruckSim环境下搭建整车模型,包括车身模型、转向系统、制动系统、驱动系统、悬架及轮胎模型等,并设计包含路面模型的试验工况。实车参数如表1所示。而在Simulink中搭建参考模型及控制策略。
参考标准[14],设定双移线试验工况,对整车横摆控制效果进行仿真试验验证。对比无控制策略、以二自由度模型或扩展三自由度模型为参考模型的控制算法对整车的控制效果。(注:无控制策略即驱动转矩平均分配)。
3.1 高附着系数路面双移线试验
试验要求:路面平整,附着系数μ=0.85,坡度小于1%。
评价指标:横摆角速度、质心侧偏角、侧向加速度、轮边驱动转矩、行车轨迹及最高入口车速。
3.2低附着系数路面(冰雪道路)双移线试验
试验要求:冰雪路面,附着系数μ=0.3,坡度小于1%。
评价指标:横摆角速度、质心侧偏角、侧向加速度、轮边驱动转矩、行车轨迹及最高入口车速。
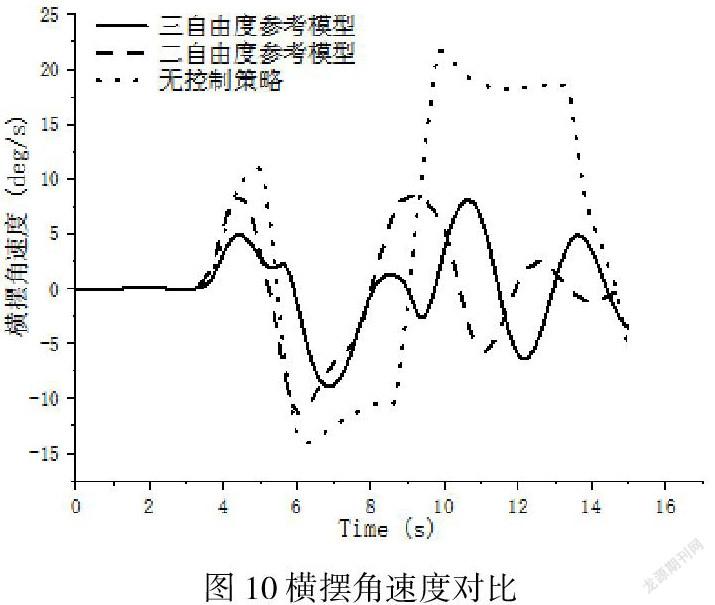
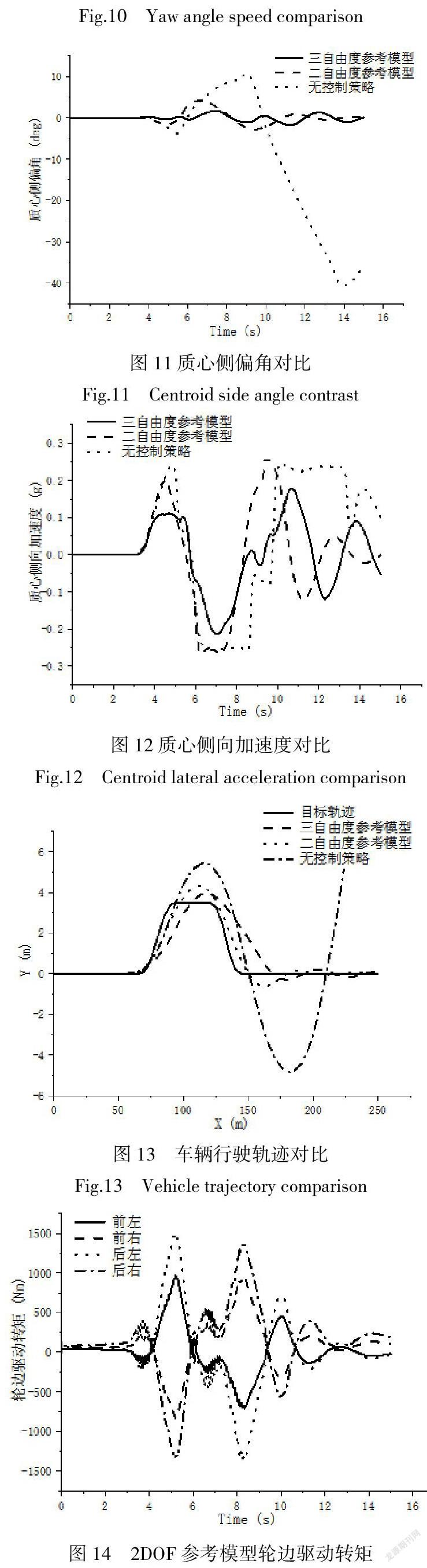
试验结果如图10-图15所示。
低附着系数路面试验数据对比如表3所示。
由图10-图15试验结果可知,在路面附着系数比较低时3DOF控制策略对整车的控制效果更好一些,表3指标对比亦可体现,与3.1试验结果一致。说明在极限条件下3DOF控制策略的参考模型更加合理。同时对比图14和图15可知,3DOF控制策略中驱动转矩更加平滑,并且四轮转矩幅值较小,说明在此工况下扩展三自由度车辆参考模型的引入使控制输入的实际值与参考值偏差减小,降低了控制难度,避免了滑模控制算法出现抖振现象。
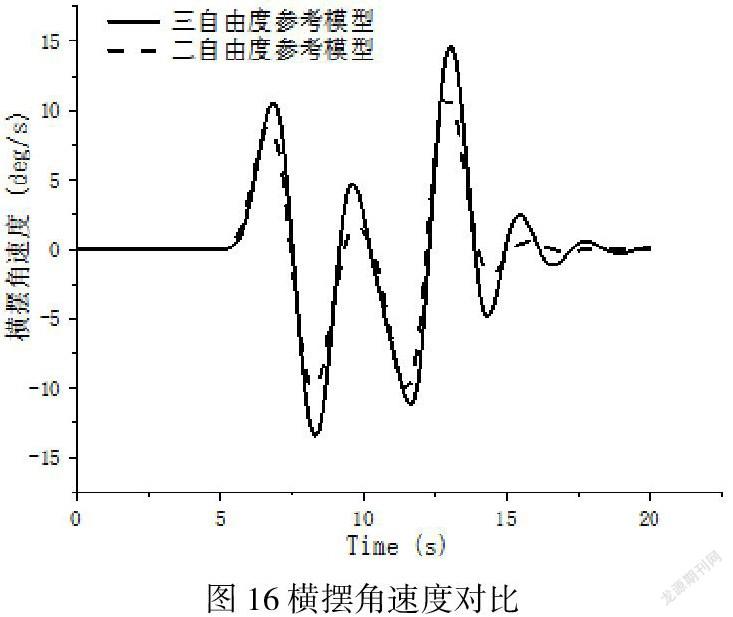
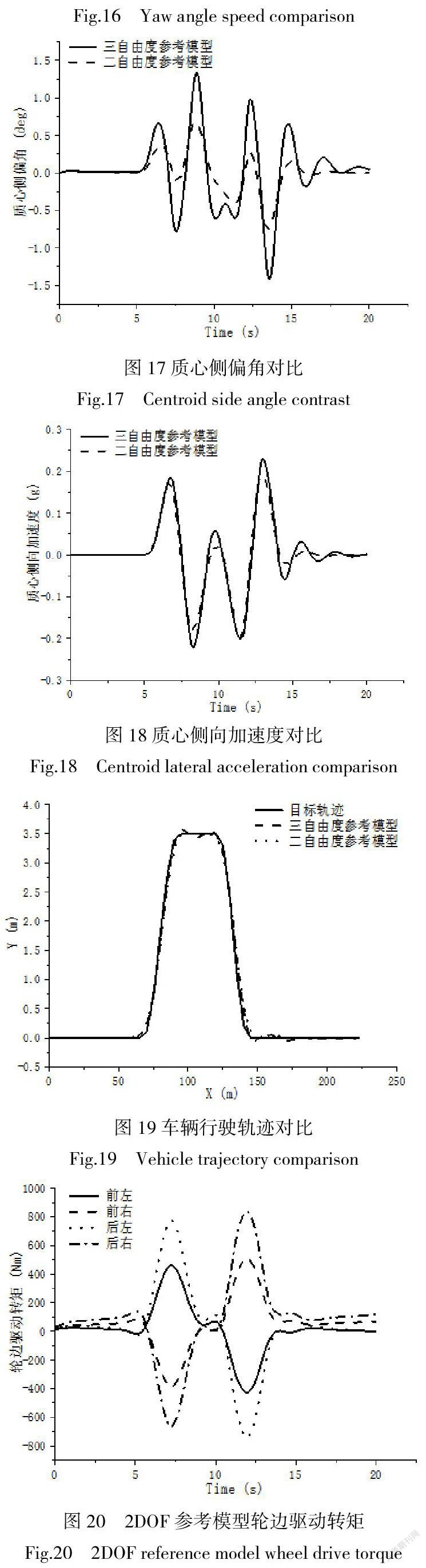
3.3高附着系数路面、低速双移线试验
试验要求:路面平整,附着系数μ=0.85,坡度小于1%。
评价指标:横摆角速度、质心侧偏角、侧向加速度、轮边驱动转矩及行车轨迹。
试验结果如图16-图21所示。
由图16-图21试验结果可知,在良好道路、车速较低(40km/h)时,且驱动调节力矩相差不大的情况下,2DOF控制策略对于车辆的方向控制及侧倾控制效果更好,与高速时(3.1试验)正好相反。指标对比如表4所示。验证了本文第2节所提出的复合参考模型车辆稳定性控制算法的可行性及有效性。
4结束语
本文面向四轮独立驱动电动汽车,对基于理想参考模型的横摆稳定性控制算法进行了仿真试验与分析。所得主要结论如下:
(1)从车辆动力学模型及试验的角度论证了二自由度车辆模型及扩展三自由度车辆模型分别在非极限和极限工况下对车辆实际横摆运动状态的描述特性,扩展三自由度车辆模型弥补了二自由度车辆模型在复杂极限工况中的不足。
(2)扩展三自由度车辆参考模型的引入降低了极限工况下横摆稳定性控制难度,减少了滑模控制算法由于实际值与参考值相差较大引起的抖振现象发生,驱动电机的转矩控制曲线未出现明显抖振情况。
(3)提出了基于复合车辆参考模型并集成改进动态面滑模变结构控制和按载荷分配转矩的横摆稳定性控制方法。该方法能够根据路况及车辆状态选择不同的参考模型进行运算,使其在极限工况下同样具有较好的控制效果,扩大了横摆稳定性控制算法的适用工况范围,对车身姿态的控制是有效和可行的。
参考文献
[1]王亚琴,田杰,蔡隆玉,杨敏.基于相平面的车辆稳定性DYC控制[J].制造业自动化,2014,36(12):38-40.
[2]施继忠,张继业,徐晓惠,胡永举.含随机干扰的车辆跟随系统滑模控制[J].西南交通大学学报,2015,50(06):1088-1093.
[3]熊璐,曲彤,馮源,邓律华.极限工况下车辆行驶的稳定性判据[J].机械工程学报,2015,51(10):103-111.
[4]熊璐,余卓平,姜炜,蒋造云.基于纵向力分配的轮边驱动电动汽车稳定性控制[J].同济大学学报(自然科学版),2010,38(03):417-421+426.
[5]欧健,程相川,周鑫华,杨鄂川,张勇.基于汽车稳定性控制系统的侧翻控制策略[J].西南交通大学学报,2014,49(02):283-290.
[6]王成.四轮毂电机电动汽车状态软测量及操纵稳定性控制系统研究[D].吉林:吉林大学,2016.12.
[7]Chu,Wenbo.[Springer Theses]State Estimation and Coordinated Control for Distributed Electric Vehicles[J].2016,10.1007/978-3-662-48708-2.
[8]Song Dandan,Yang Tao.A research on internal model control for vehicle yaw stability[P].Information Science and Technology (ICIST),2014 4th IEEE International Conference on,2014.
[9]Fei Liu,LuXiong,Xiaopeng Wu.Design and experimental validation for stability control of four-wheel-drive electric vehicle[P].Transportation Electrification Asia-Pacific (ITEC Asia-Pacific),2014 IEEE Conference and Expo,2014.
[10]Hamzah,N.,Sam,Y.M.,Selamat,H.,Aripin,M.K.,Ismail,M.F..Yaw stability improvement for four-wheel active steering vehicle using sliding mode control[P].Signal Processing and its Applications (CSPA),2012 IEEE 8th International Colloquium on,2012.
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
汽车博览(2019年6期)2019-06-03
领导文萃(2016年20期)2016-10-26
人民周刊(2016年11期)2016-06-30
世界知识(2016年5期)2016-05-14
投资北京(2016年6期)2016-05-14
世界汽车(2015年3期)2015-09-10
计算机应用文摘·触控(2014年4期)2014-02-22