基于自主动态构建S模式雷达锁定地图的研究
2021-09-22 21:42郭林辉
科技研究 2021年22期



摘要:模式S二次雷达是对传统A/C雷达工作方式的变革,扩展出数据链能力,提供更丰富的监视信息,逐步成为空管监视领域主要的探测系统。随着S模式雷达推广使用,询问码短缺和1090MHZ信道拥塞问题也突显出来,让S模式雷达走向集群组网,成为一个协同监视体系。在协同监视工作模式下,每部雷达必须设置锁定地图(LockoutMap),而地图的设置是一个比较复杂的问题,这里提出了一种基于自主机制动态构建锁定地图的方法,提高组网运行效率,降低风险。
关键词:雷达S模式;锁定地图;飞机雷达
一、引言
S模式数据链是民航监视体系重要的低空数据链技术,它支持二次监视雷达(SSR)、防相撞系统(TCAS)、广播式自动相关监视(ADS-B)以及多点系统(MLAT)的运行。由于支持的探测系统较广,而其频率带宽有限,在飞行流量密集区域,信号的拥塞严重,会存在目标丢失的现象,为解决这类问题,欧控(EUROCONTROL)早在本世纪初就制定S模式二次雷达组网运行体制。组网体制中核心解决的两类问题,一是将多个站点进行聚类集群,二是解决一个集群中的协同运行,即锁定地图的设置策略。如何设置锁定地图,就需要对S模式二次雷达运行机制进行分析。
(一)S模式雷达运行方式
S模式二次雷达采用全呼(ALL-CALL,AC)和选呼(ROLL-CALL,RC)两种询问方式。一般情况下AC和RC是交替进行的,在AC阶段,雷达完成对目标的捕获,获取其唯一的24位ICAO地址;在RC阶段,利用获取的24位ICAO地址对该目标进行点名询问,获取高度、航空器标识及BDS等信息。
1.ALL-CALL运行模式
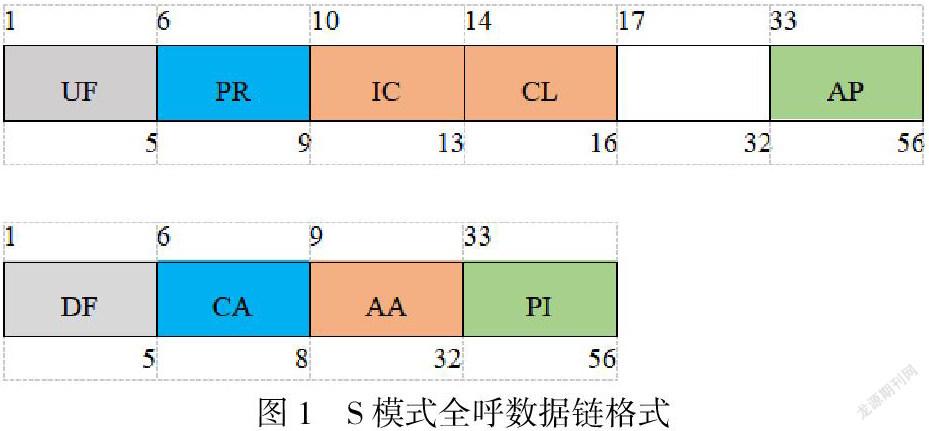
S模式雷达全呼叫模式采用UF11的数据链询问,飞机以DF11数据链应答,上下行格式如图1。其中,全呼询问中以24个“1”作为地址,所有未被锁定的飞机依据询问捕获概率(PR字段)进行应答。飞机收到UF11后进行全呼应答,雷达获取飞机的大致位置和S模式地址,并将其加入选呼列表。全呼的过程中,雷达需要依据锁定地图来进行PR字段设置,确定是否锁定飞机应答机。
2.ROLL-CALL运行模式
飞机被全呼捕获后,雷达依据选呼列表开始跟踪目标并进行点名询问。选呼中包含目标地址且在预期的目标位置进行询问。选呼过程中也会依据锁定地图发送锁定命令,通过锁定询问器代码来抑制全呼应答。选呼询问的格式有四种分别是UF4、UF5、UF20、UF21,对应的应答格式是DF4、DF5、DF20、DF21,数据链格式如图2,其中SD包含锁定信息,对4、5两种类型的格式没有MA或MB字段。
3.锁定地图
组网中的雷达通过锁定地图来实现锁定,锁定地图由三维空间格组成。空间格的大小依据管制运行间隔设定,一个空间格有大约5NM×5NM×200ft的。空间格含有锁定的状态,如状态值为1,则该空间格的飞机被雷达锁定,如状态值为0,则飞机不会被锁定,如图3所示。
二、动态锁定地图运行构建
本文主要解决组网后雷达之间的地图锁定问题。将雷达覆盖区域分成5NM×5NM×200ft的空间单元,每个空间单元给出锁定状态,如1表示锁定,0表示未锁定,形成一张雷达组网的锁定地图。这张地图看似容易生成,实则考虑到真实覆盖的情况和雷达离线情况,准备的地图将会很多。我们利用雷达组网之间的信息交互,动态的实现锁定地图的更新。
(一)组网锁定地图描述
同一组网中,我们给每个S模式站点设置锁定地图(LockoutMap),只要相邻站点之间的关系稳定,就无需改变锁定地图的状态。
当前的锁定地图分配存在两个问题。首先,很难创建最佳锁定图。为了创建锁定地图,我们通过基于地形数据的计算机模拟使用视线监视覆盖范围,模拟覆盖不能够完全匹配真实覆盖,存在一定的差异性。其次,随着站点数量的增加,必须准备许多地图,如果n(n=2,3,4,...)个站点接入网络,则需要2n个锁定地图。管理2n个锁定地图是十分复杂的。因此,让每个站点动态自主构建锁定地图,问题将变得简单化。
(二)动态自主地图构建
实现自主构建的前提是相邻站点的信息交互,就是雷达组网中定义的ASTERIX 017格式。它由两种类型的信息,即在线信息(AliveMessage)和目标信息(TargetMessage),消息格式如图5所示。
1.初始阶段
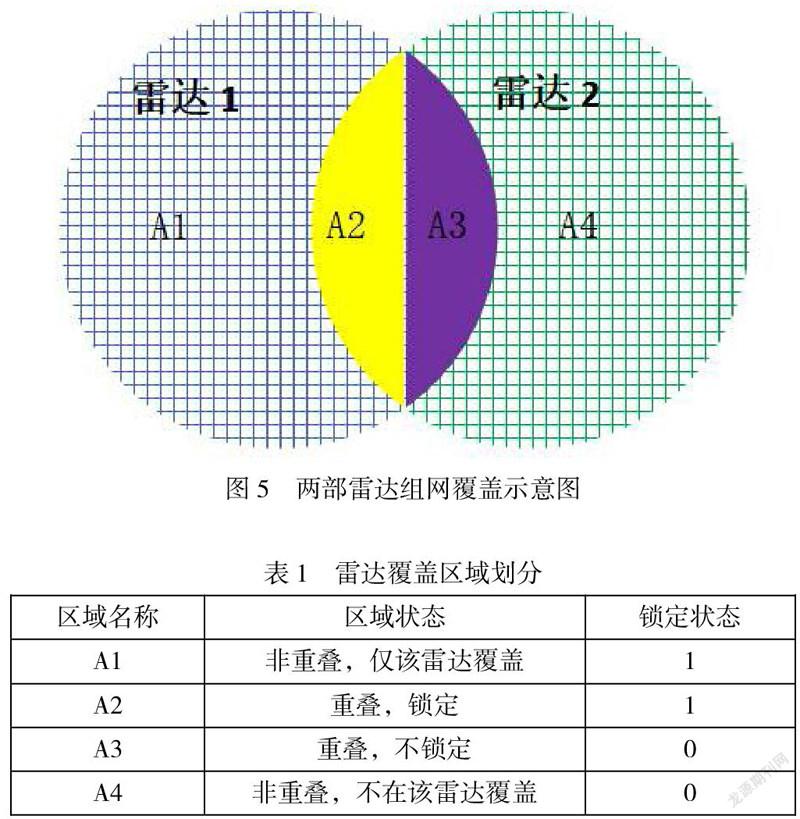
为了简单化,我们以两个雷达站组网来进行说明。首先是依据覆盖创建初始锁定地图,图5说明两个雷达站的覆盖情况,将其划分未4个区域,其中A2和A3是重叠区域。对于雷达1来说,这四个区域代表意思如表2所示,雷达2则反之,设定在重叠区域距离近的雷达负责锁定,也可设定重叠区域内雷达相对于航线夹角大的负责锁定。
构建的初始锁定地图,并不是真实情况,下面通过两个雷达站之间通过信息交互,来进行重叠区域的确定,逐步逼近真实的重叠区域,以及对锁定地图不断优化。
2.动态自主阶段
在运行稳定的组网中,初始阶段完成了覆盖重叠区域的确认,构建最基本的锁定地图,这里涉及到覆盖地图的构建。自主阶段就是依据信息交互动态构建锁定地图。下面以顶空盲区重叠空间元来说明动态构建说定地图过程。
顶空盲区重叠空间元:依据就近原则,雷达A的顶空盲区应由雷达A来负责询问锁定,顶空盲区不确定性,很难构建。此时,通过信息交互,雷达B在4-10秒内未收到雷达A顶空盲区的目标信息,则雷达B启动对雷达A顶空盲区的询问覆盖,并修改組网中锁定地图。如果是其他遮蔽区域空间元也是一样处理方式。如果重叠区域两部雷达都不能够询问到目标,则将该区域改为A4,从锁定地图中去除。
对于某一雷达离线后,组网内的其他雷达通过在线信息(AliveMessage)确认该雷达离线,其他雷达负责接管重叠区域的锁定状态,更新锁定地图。雷达恢复正常进入组网后,同样依据在线信息,其他雷达释放该雷达重叠区域的锁定状态,由该雷达负责询问锁定,更新组网锁定地图。
这样通过信息交互的方式,实现组网监视下锁定的地图的最优配置,还可以扩展锁定条件,不断优化锁定地图。如流量密度大的情况下,获取更多S模式信息,将某部雷达部分空间元的锁定交由其他雷达处理,减少該雷达选呼频次,并达到信息最大化。
三、结论
本文立足于解决S模式组网后锁定地图的优化,提出了动态自主构建锁定地图优化方案,对于实际运行还要考虑更多,尤其是初始阶段,需要对雷达覆盖范围进行确认,这样可以更快的实现锁定地图的构建。后期研究尝试将ADS—B(自动相关监视)和MLAT(多点监视)站点信息辅助S模式二次雷达锁定地图构建,减少运行中的风险,使地图构建更加可靠。
参考文献:
[1]二次雷达原理. 张尉. 国防工业出版社 . 2009
[2]雷达通信一体化组网目标定位算法研究. 胡飞. 电子科技大学 . 2015
[3]A New Transmit Beamforming Method for Multi-User Communication in Dual-Function Radar-Communication[J]. XueYao,YuLiu,ZaichenZhang,XianxiangYu,Guolong Cui. Journal of Beijing Institute of Technology. 2021(01)
[4]S模式二次雷达协同监视功能系统仿真[J]. 水泉,余飞侠. 现代信息科技. 2020(06)
[5]王广宇.空管雷达组网覆盖和数据传输问题的改进[J].硅谷,2011(17):62-63.
[6]European Mode S Station Functional Specification. Eurocontrol. 2015
[7]Annex 10 to the Convention on International Civil Aviation Aeronautical Telecommunications Volume IV. ICAO. 2017
[8]Koga T,Mori K.Autonomous Lockout Map Construction Technique for Secondary Surveillance Radar Mode S network[J]. IEEE National Radar Conference Proceedings,2010.
作者简介:郭林辉(1983-1),男,汉族,江苏省盐城市人,硕士学历,工程师职称,现任民航安徽空管分局单位机务员,主要研究方向:空管监视系统。