
浅析北京大兴国际机场多点监视系统
2021-09-23 07:47闫峰
电脑知识与技术 2021年21期
关键词:系统架构
闫峰

摘要:随着我们民航业的快速发展,北京大兴国际机场将成为我国京津冀地区发展的重要航空枢纽,机场场面运行的安全与高效变得尤为重要。因此,该文对北京大兴国际机场运行的多点监视系统(Multilateration Surveillance System-Airport,NEO-A)的工作原理和主要功能进行了介绍,希望通过该文能为相关领域的人员提供借鉴意义。
关键词:多点监视系统;系统原理;系统架构
中图分类号:TP311文献标识码:A
文章编号:1009-3044(2021)21-0136-03
开放科学(资源服务)标识码(OSID):
随着北京大兴国际机场的顺利开航,不仅开启了我国现代综合交通一体化的新篇章,还进一步开启了京津冀一体化发展的新引擎。未来几年,大兴国际机场将成为北京南部另一座重要的航空枢纽,首都机场和大兴机场的同时运行,将开启京津冀地区交通枢纽的新局面。未来几年里,随着大兴国际机场的使用,机场的航班量会快速增长。机场要解决好的问题之一就是如何安全高效的调度场内的航空器与车辆。为此,北京大兴国际机场安装了ERA公司的全新一代多点监视系统(Multilateration Surveillance System-Airport,NEO-A)。
NEO-A专用于提供机场表面上所有配备S模式应答器的飞机,车辆和其他目标的监视数据。当能见度不佳情况下,该系统能有效提供给管制员机场航空器与车辆信息,确实掌握机场主要跑道、滑行道上航空器及各类勤务车辆之活动情形,以保障机场航空器和安全,提升飞行效率,并避免机场场内不安全事件的发生。
本文首先对NEO-A系统的站点分布进行了阐述,在此基础上对系统的工作原理进行了详细的描述,并对该系统架构,系统软件监控及有关车辆跟踪单元的使用进行了相应描述。
1系统概述
NEO-A是一套主动互助型的侦测系统。兼具监视及辨识航空器能力。系统使用差分多点定位技术,能为配备空管模式(A / C / S模式)应答器的所有飞机,车辆和其他物体提供准確,可靠的实时定位和标识。系统还能对广播式自动相关监视系统ADS-B消息(1090 ES)进行解码,并且能够独立进行满足监视数据传输交换协议的ASTERIX输出。系统能满足机场24小时连续监视需求,运行维护成本低,可靠性高。
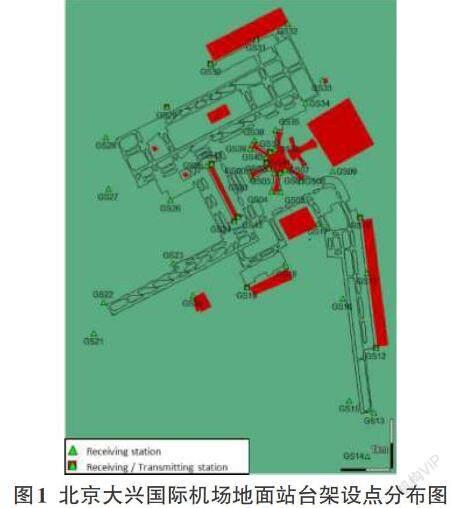
北京大兴国际机场的NEO-A系统包含31个接收站台和13个接收传输站台。如图1所示。系统信号是由设置在机场周边的地面站台接收处理装置在飞机上的应答机发送出来的讯号,因此地面站台的选址非常重要,地面台站信号质量影响着系统的涵盖范围大小及范围内是否能得到最佳接收效果。在台站选址厂商除了现场勘查外,还使用分析工具为机场台站信号分布做前期的安装准备。通过软件计算多站点主动和被动监视系统的监视视线,系统覆盖范围,从而提升系统准确性。
地面站台精确测量由答询机送达讯号的时间差决定,不同的时间差代表着飞机与地面站台的不同距离,地面站台将时间差的信息传送至中央处理站台(Central Processing Station,CPS),中央处理站台以此计算出目标的位置。以下为本系统主要特点:(1)具备高精准的位置侦测能力;(2)系统更新信息快;(3)可辨识航空器呼号及航空器高度;(4)独特的讯号处理技术解决多路径效应的影响;(5)系统具有接收ADS-B数据的能力。
2系统原理
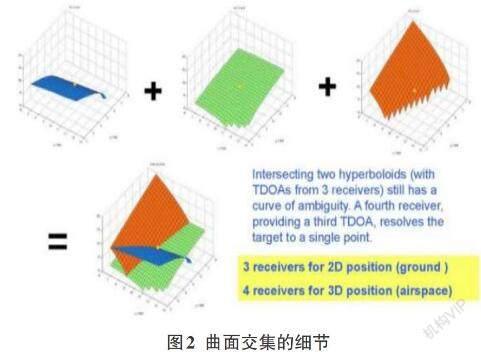
NEO-A主要基于到达时间差(TDOA)原理。目标位置的计算最少需三个双曲面,三个双曲面相交得到的一个交叉点,该点即为目标的位置。以目标物到两个地面站台之间的距离差为一常数,将站台与目标之间的坐标距离做等量数学计算,即形成一个双曲面,利用另一对地面站台可绘制出其他的双曲面。不同的曲面相交可以形成三曲面,利用数学计算,飞机与机载应答的三维位置可以计算出来。如图 2所示。
NEO-A主要基于到达时间差工作原理如下:首先,让我们在两个分开的位置F1,F2上安装两个频率为1090 MHz的接收机。假设两个接收器同时接收了从机载应答器发送的应答信息。此时,假设有可用的设备能够测量同一信号到达两个接收器的时间差。当与两个特定点(接收者)的距离(d1–d2)具有相等差的点集是(在2D空间中)双曲线,其焦点集中在这些点(F1,F2)。现在,如果系统再增加一个接收器,则在两对接收站上应用上述原理将创建两个双曲线,在某个点具有相交点。所以,在现实中(3D空间),存在三维对象(超曲面)而不是双曲线。目标位置在两个双曲面与水平面的交点处。如果再增加一个接收站,则通过应用相同的原理,我们可以得到在空域中具有相交点的三个双曲面,系统形成一套三维定位系统。
以二维的形式说明如下:如图 3所示,站台 A 与航空器距离为 R1,R1=C*TOA1,TOA 代表由航空器发出讯号到达地面站台所需时间(Time Of Arrival,TOA),C为光速,站台 B 与航空器距离为R2 ,R2=C*TOA2,距离差的等式为R2-R1=C*(TOA2-TOA1),以距离差 R2-R1 的值为常数不变,分别改变R1、R2的值,可绘制出一条的双曲线,航机处于该双曲线任一点所得到的距离差都是相同的,表示当只有两个站台接收到航空器讯号时,并无法明确测出航空器位置。再加入站台C,得另两等式 R1-R3=C*(TOA1-TOA3)、R2-R3=C*(TOA2-TOA3),可再绘制出两条双曲线,三双曲线交叉点即指出目标物位置所在。有如几何学用圆弧相交求交叉点,在平面上,两个圆弧相交于两点,要知道是哪一点正确就要度量与第三个点的距离 (即第三个圆弧)。所以平面上,用三个站台可明确标示出二维(2D)的目标物位置。在立体的情形下,多了高度,便要利用第四个站台。所以,要明确标示出三维中(3D)目标物的位置,最少需要四个站台才能完成。利用数学计算,飞机与机载应答的三维位置可以计算出来。如图4所示。
猜你喜欢
中国高新技术企业(2016年34期)2017-02-10
科技创新导报(2016年23期)2016-12-23
软件导刊(2016年11期)2016-12-22
科技视界(2016年23期)2016-11-04
中国市场(2016年27期)2016-07-16
