履带车辆牵引计算与行驶性能分析
2021-09-24 08:44刘瑞强
内燃机与配件 2021年18期
刘瑞强
摘要:履带车辆的牵引计算是传动装置和发动机装置设计的重要环节。根据牵引计算的结果,可以预先评价履带车辆的燃油经济性和提出自动控制行驶的规则。履带车辆牵引计算的共同任务,是在给定的发动机功率下,在考虑到传动装置形式以及转向机构形式及参数的同时,确定传动装置内的速度范围,排挡数和排挡划分,以便保证履带车辆的最佳动力性能。
Abstract: Traction calculation of tracked vehicles is an important link in the design of transmission and engine devices. According to the results of traction calculation, the fuel economy of the crawler vehicle can be evaluated in advance and automatic control rules can be proposed. The common task of the traction calculation of the tracking vehicle is to determine the speed range, gear number and gear division while considering the drive form and the steering mechanism form and parameters, so as to ensure the optimal dynamic performance of the track vehicle.
關键词:履带车辆;牵引计算;传动装置
Key words: tracked vehicles;traction calculation;transmission
中图分类号:U469.6+94 文献标识码:A 文章编号:1674-957X(2021)18-0087-02
0 引言
已知结构履带车辆检验性牵引计算的共同任务,是确定和评价车辆的动力性能。上述两种任务是在发动机外特性或在任何给定的工况下(通用牵引特性)工作时,均通过绘制直线行驶牵引和制动特性曲线来解决。转向在考虑到允许的行驶速度的同时,以在各种土壤上的行驶轨迹曲率来表示。
1 传动装置效率的计算
通过传动装置传输发动机功率,伴随着传动装置各组成部分的能量损失。在没有负荷的情况下对传动装置功率损失进行计算。速度功率损失ΔNC由未结合摩擦部件中的功率损失ΔNΦ和传动装置机械部分的功率损失ΔNM(行星排和齿轮传动、轴承和密封件中的功率损失)的相加得到,有:ΔNC=ΔNΦ+ΔNM
2 液力变矩器
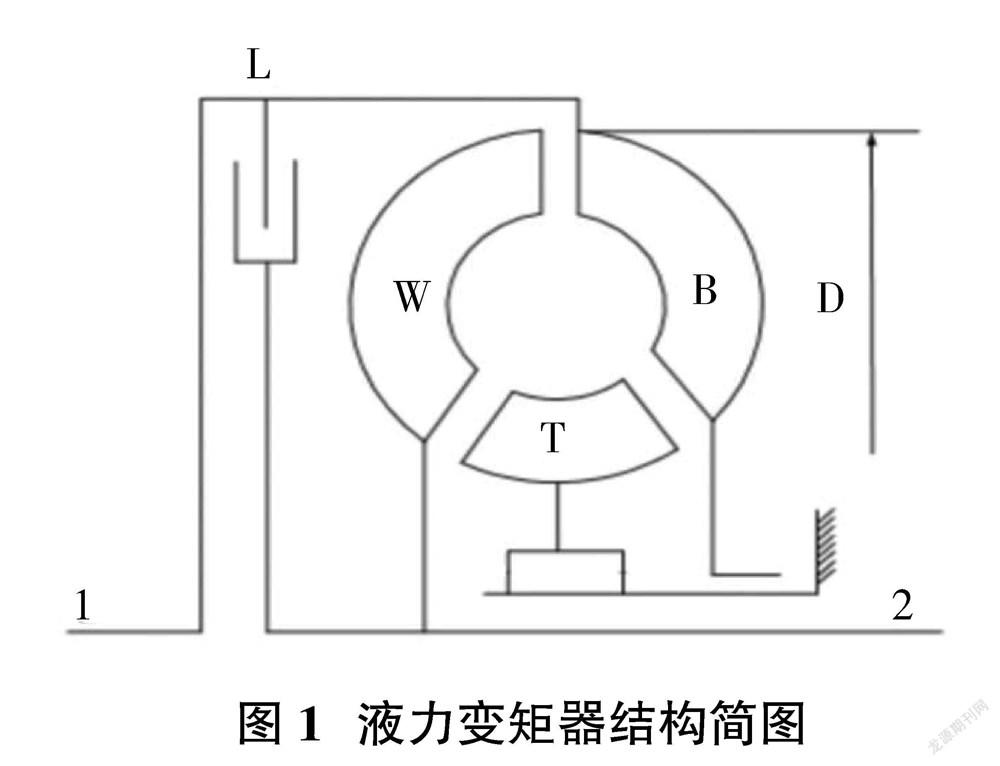
液力变矩器结构简图如图1所示,其通常位于发动机和变速机构之间,主要由三个工作叶轮组成,其中B为泵轮、W为涡轮、T为导轮。
2.1 液力变矩器的原始特性
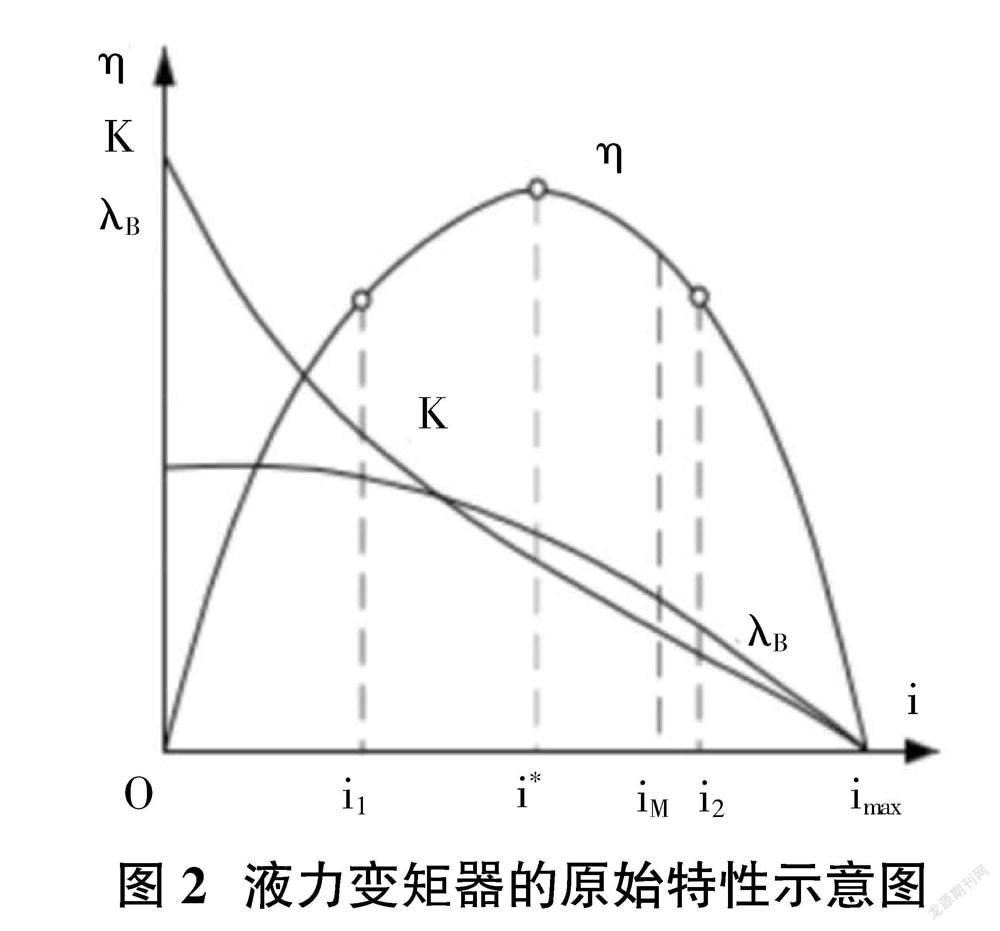
液力变矩器的原始特性关系图如图2所示:其中K为变矩比、η为效率、λB为转矩系数、i为转速比。
2.2 液力变矩器的转速比
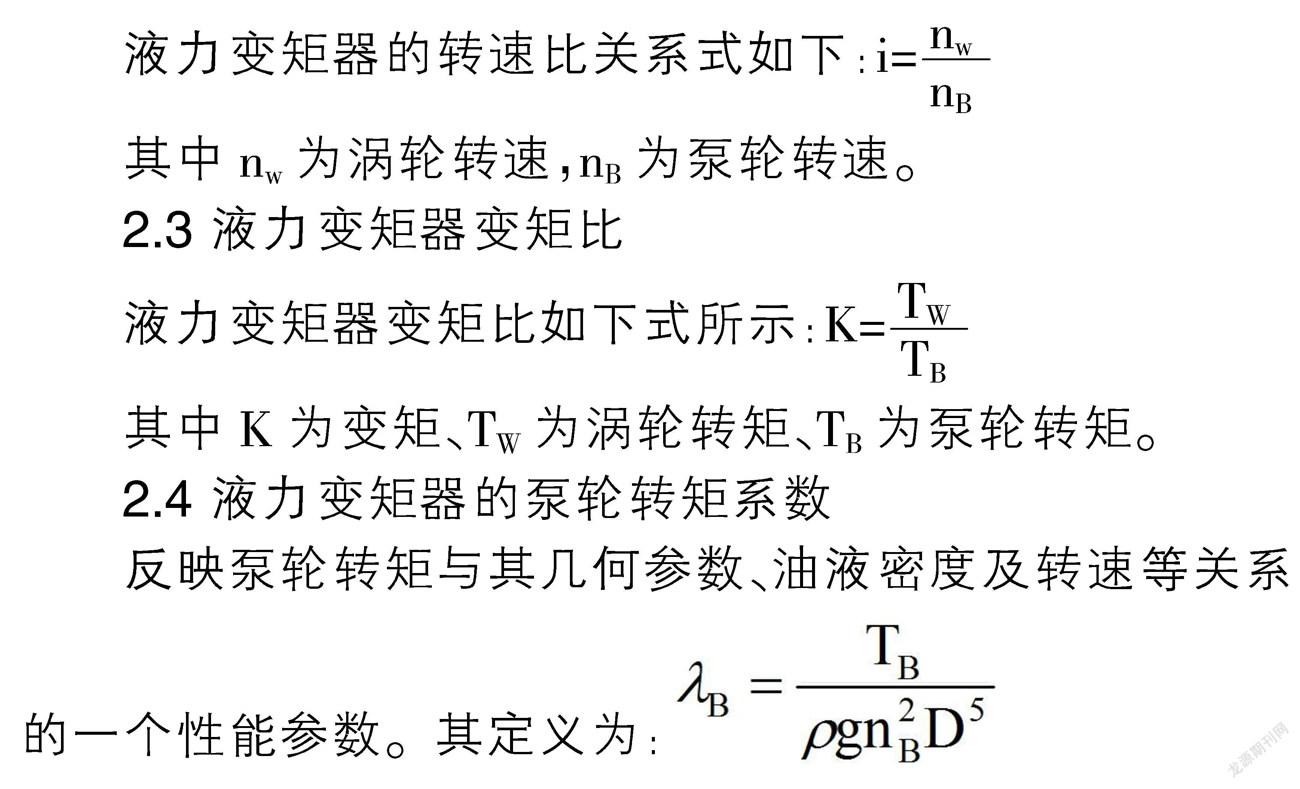
液力变矩器的转速比关系式如下:i=
其中nw为涡轮转速,nB为泵轮转速。
2.3 液力变矩器变矩比
液力变矩器变矩比如下式所示:K=
其中K为变矩、TW为涡轮转矩、TB为泵轮转矩。
2.4 液力变矩器的泵轮转矩系数
反映泵轮转矩与其几何参数、油液密度及转速等关系的一个性能参数。其定义为:
2.5 牵引特性
当对有液力机械式传动装置的履带车辆进行直线行驶牵引计算时,具有下列特点:①在液力变矩器正常工作时,其中传动装置的运动学传动比由机械式部件和液力变矩器的传动比共同决定。②液力变矩器的运动学传动比,应与绘制履带车辆牵引特性时确定的发动机工况相对应。③液力机械式传动装置是一种在较少情况下具有两自由度的系统,当分析履带车辆加速时应考虑这点。④液力机械式传动装置的动力学传动比与运动学传动比差别很大,并且在每种工况下不仅由机械部件决定,而且还取决于液力交矩器的动力学传动比。⑤当决定变速箱的速度范围和划分排挡时,应考虑液力变矩器的闭锁。
2.6 共同工作特性
所谓共同工作的输入特性,是指与发动机曲轴直接相联的液力元件泵轮轴,在稳定工作状态下的力矩与转速关系 ,而把涡轮轴上相应力矩与转速关系 叫做共同工作的输出特性。
利用 式 和式 ,计算出它们共同工作的输出性。作为技术比较成熟先进的TCL-421系列液力变矩器可以作为安装在履带车辆的首选。
3 行动部分功率损失分析
履带车辆直线行驶和转向牵引计算时,行动部分的功率损失分成3个重要组成部分,这三部分是履带缠绕损失、摩擦损失和负重轮沿履带板的滚动损失。
用于履带缠绕的功率损失不依赖传输的功率大小,并可看作是空转损失,且与履带车辆行驶速度(至50km/h)成正比。履带与主动轮啮合中的功率损失,也如同履带和链条传动一样,取决于所传输的功率。
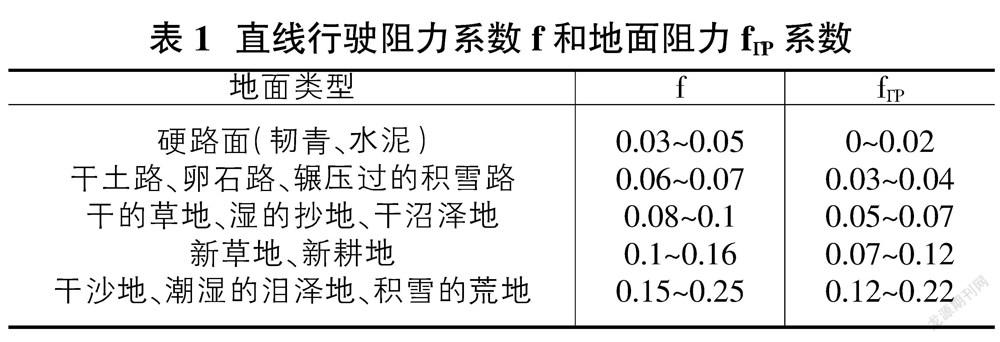
负重轮沿履带滚动的功率损失(组成部分)正比于悬挂质量,以及履带车辆在所有速度范围内的行驶速度,通常在考虑到把悬挂质最换算成车辆全重的同时,用负重轮沿履带滚动阻力系数fK的形式表示。系数fK包括在履带车辆直线行驶阻力系数的组成内:f=fK+fГP
式中fГP为地面阻力系数。
履带车辆多次行驶试验所得到的系数f和fГP的试验值如表1所示。
换算公式表明,沿地面移动和沿履带(板)滚动负重轮时产生的履带车辆直线行驶阻力,取决于作用到履带支承表面上的履带车辆重量的垂直组成部分。
傳统的车辆地面力学基于经典土力学理论,较多的是将与行走机构作用的土壤看成是弹塑性体、非线弹性体、粘弹性体等非线性材料,认为土体的本构关系是恒定的,加载的瞬间土壤即开始变形,不考虑加载时间的影响。
4 自动换挡系统
建立自动换挡系统的任务是首要的,有利于节省驾驶员体力和减少燃油消耗,对自动换挡系统要求如下:①换挡时间和判挡或降挡时刻的选择。②在换挡过程的过渡时间内动力装置组成部分的工作状态调节。③在换挡时不要发生机件损坏。④利用履带车辆的整个牵引特性。⑤动力装置工作在经济状态,在换挡时工作中断时间最短。⑥消除循环换挡。⑦减少不合理的换挡次数。⑧可从自动过渡到手动换挡(或半自动)和相反。⑨手动操纵优先。
自动换挡操纵系统可选择换挡时间,确定换挡方向(升挡或降挡),完成换挡计算,消除动力装置部件的损坏,保证驾驶员随时进入到手动操纵。同时系统的这些特性可降低对驾驶员技术水平的要求,减少训练学习时间,提高行车信心,减少对保持规定的车辆适应能力的训练量。车辆行驶的外部条件,包括各种随机不确定性的道路阻力及其较大频次变化范围的行驶阻力。驾驶员应当时刻观察外部条件,并在这些条件变化时及时改变车辆行驶的状态和参数。为此,车辆应具有允许驾驶员强制性地改变它的状态和工况的操纵机构,这样,驾驶员才有可能保证车辆按照外部行驶条件进行有效和安全地行驶。
必须注意到,例如:液力机械传动的履带车辆牵引特性,其特点是存在两个高油耗区。第一个(在高速行驶范围)解释为发动机燃油经济性的特点,在该区域随着其曲轴转速增加和负荷降低发动机油耗增加。第二个是由于在低转速时液力变矩器效率降低。因此,工作的经济区在每挡的中间速度范围内。在低挡调节特性曲线上,由低挡到高挡换挡规律点位置,要求有高精度的参数测量并影响到履带车辆的加速性。
消除换挡循环最基本的方法是根据换挡行驶速度实现换挡规律的分隔。早期换挡循环出履带车辆现在不合理的换挡,采取的办法是在换挡时延缓执行换挡指令,这也是换挡规律的修正。延缓履带车辆可按3个原则处理:如正常的换挡规律移动;驾驶员加以干预;考虑操纵对动力或对履带车辆行驶速度修正换挡规律。履带车辆偏移正常换挡规律的延迟是基于自动换挡系统完成换挡的算法总是比驾驶员反应快。知道由自动换挡系统和驾驶员保证的“升挡”和“降挡”时的换挡时间,在自动换挡系统可取平均履带车辆差值,作为换挡时执行指令的延迟。延迟不能超过1.5~2秒,也不能导致履带车辆经济性和动力性出现明显地下降。有相关试验表明,液力机械传动的自动换挡数量少,因此建立液力机械传动的自动换挡系统要比机械传动容易;排挡之间宜安排得足够远,以适应自动换挡系统附加手段和对精度提高的要求。液力变矩器的减振性能、其自身的自适应性,使得对换挡系统在换挡过渡过程调节系统的要求简化。换挡算法与机械传动具有一样的操纵运算量,但除精度要求外,在很多情况下类似遥控操纵系统。
驾驶员操纵机构的“自动化”是非常明显的趋势。用操纵机构的标准元器件和用途描述各种汽车的用途、类型和结构;具有相似的布置和结构,相同的操纵算法,促使所有驾驶员很快适应车辆,缩短训练时间和提高驾驶质量。
履带车辆驾驶员工作的模式完全和汽车驾驶员的一样未必可能,但使其在机构、操纵算法相似,则是完全可能的。这样就简化了驾驶员训练任务,缩短培养周期,以便更快提升驾驶员培养质量,为增加作战人员提供有利条件。
参考文献:
[1]王红岩,芮强,高连华,沙学锋,等译.履带车辆传动装置[M].北京:国防工业出版社,2014.
[2]黄祖勇著.贾振中,李升波,胡晓松译.地面车辆原理[M].北京:机械工业出版社,2018.
[3]阎清东,张连第,等.履带车辆构造与设计[M].北京:北京理工大学出版社,2007.
[4]陈淑艳.移动机器人履带行走装置的构型与机动性能研究[J].2008.
[5]孙伟,李维东,等.装甲车辆构造[M].2006,04.
[6]闫青东,李宏才编著.装甲车辆构造与原理[M].2019,06.
[7]梁朝彦主编.汽车构造与维修,发动机部分[M].2008.