高速公路改扩建期间强制变道行为驾驶模拟的有效性研究
2021-09-27 05:31张彦宁孟凌霄刘学强
重庆交通大学学报(自然科学版) 2021年9期
孙 智,张彦宁,孟凌霄,刘学强
(1. 中国建设基础设施有限公司,北京 100044; 2. 同济大学 道路与交通工程教育部重点实验室,上海 201804;3. 中建筑港集团有限公司,山东 青岛 266031)
0 引 言
为了保证正常的交通运营,高速公路改扩建施工一般采用封闭部分车道,边运营边施工的策略。封闭部分车道使得车辆在进入施工路段前由当前车道向未封闭车道变道,而在这种强制变道过程中易发生追尾、侧向碰撞等交通事故[1]。驾驶模拟技术是研究类似交通安全问题的有效工具,可在安全环境中再现危险行车场景并采集驾驶行为数据,具有良好的安全性和可靠性。
在驾驶模拟实验前,需要确定驾驶模拟器有效,以保证实验结果可靠。驾驶模拟的有效性是使用驾驶模拟技术研究交通问题的前提[2],一般通过驾驶行为数据进行判断,包含速度、距离、时距、越线行为等;张翔等[3]提出驾驶模拟器的有效性可通过实车、驾驶模拟对比实验和统计检验方法进行分析;刘兆等[4]用车速验证了不同平面线形下驾驶模拟器的有效性,对比发现预测速度轨迹曲线与实车速度轨迹曲线具有相同的变化规律;毛喆等[5]指出可以使用车速和车辆横向偏移距离进行驾驶模拟器的校验,研究结果表明实车驾驶环境和模拟环境下车速变化规律基本一致;涂辉招等[6]用速度、加速度、油门刹车踏板力来分析不同自由度下驾驶模拟实验结果的差异,并通过t检验判断驾驶模拟有效性。
有时候,难以实现驾驶模拟器的绝对有效性,因为安全封闭的驾驶环境让驾驶人无法感受到驾驶危险性,从而产生激进的驾驶行为。V. BRANZI等[7]发现在研究交叉路口驾驶行为的驾驶模拟实验中,驾驶人总是超过临时限速并且发生急减速;J.TORNROS[8]指出使用驾驶模拟器研究隧道内驾驶行为时,车辆速度比实车驾驶时要大;D. LLOPIS-CASTELL等[9]、F. BELLA[10]通过实车驾驶实验和驾驶模拟实验的对比,也发现驾驶人在驾驶模拟实验时车速比实车实验时高。
针对高速公路改扩建期间强制变道场景,笔者进行了驾驶模拟有效性分析并提出了统一的有效性检验方法。首先,设计实车驾驶和驾驶模拟实验方案;然后,提出强制变道有效性分析的关键行为指标,开展实车驾驶实验和驾驶模拟实验,观察驾驶模拟环境下驾驶人是否产生相对激进的驾驶行为;最后,进行驾驶模拟有效性分析。研究结果表明:驾驶模拟器可以有效地应用于高速公路改扩建期间强制变道行为的研究。
1 实验方案
1.1 实验设备
1)实车驾驶实验。用整合惯导系统、GPS以及数据处理系统的实验用车〔图1(a)〕来采集实验数据;用车载数据处理系统和行车记录仪记录特殊事件时间(如车辆开始变道时间),采集数据的频率为10 Hz。
2)驾驶模拟实验。同济大学驾驶模拟平台拥有8个自由度的运动平台,驾驶舱内搭建250°环形屏幕和音响系统以模拟实车驾驶的视听体验,如图1(b)。通过模拟各种交通环境,配合SCANeRTM软件,由驾驶舱内实车上安装的传感仪采集各种交通运行状态下驾驶人的驾驶行为数据以及车辆状态数据,数据的采集频率为10 Hz。

图1 实验设备Fig. 1 Test devices
1.2 实验环境
1)实车驾驶实验路段位于山东省某正在进行施工作业的高速公路,高速公路为双向四车道、限速100 km/h,全长10 km。
2)与实车驾驶实验场景相对应,在SCANeRTM驾驶模拟软件中构建相同线形、相同施工路段设施布置的模拟场景进行驾驶模拟实验。
实车驾驶实验和驾驶模拟实验施工路段限速60 km/h;按照JTG D 82—2009《公路交通标志和标线设置规范》要求,设置了相同的限速、施工警告及车道变窄等标志。
1.3 实验人员
参照D. DAVENNE等[11]的实验人员招募方案,实车实验和驾驶模拟实验均招募拥有合法驾驶执照、超过实习期并有日常驾驶经验的驾驶人。为了避免年龄、驾驶经验等对实验结果产生干扰,对驾驶人年龄和驾驶经验进行了控制:
1)实车驾驶实验。20名驾驶人,平均年龄25.4岁,标准差3.5岁;平均驾龄3.3年,标准差1.5年。
2)驾驶模拟实验。16名驾驶人,平均年龄25.6岁,标准差2.4岁;平均驾龄3.7年,标准差1.1年。
1.4 实验流程
根据R. A. WYNNE等[2]的相对有效性验证方法,同时考虑施工路段的线形、布置方式等影响因素[12-13],笔者设计了2×4×3的实验方案来观察驾驶行为指标的变化趋势,即2种实验环境(实车驾驶环境、驾驶模拟环境)、4种施工路段长度(100、500、1 000、1 500 m)及3种施工路段线形(左转、直线、右转)。实验中,要求驾驶人在指定车道行驶,当发现前方存在由于施工作业导致行车道封闭情况时,驾驶人自行判断并实施变道操作。
实验前,对驾驶人进行了预实验,以帮助驾驶人熟悉实验用车和驾驶模拟器。为避免重复实验而影响结果,每人每场景只进行一次实验。
2 有效性判别指标及判别方法
2.1 有效性判别指标
选取断面车速v、特征断面间距Δd、特征断面时距Δt作为分析强制变道行为驾驶模拟有效性的行为指标。
2.1.1 断面车速v
断面车速v即车辆通过某一特征断面时的速度。强制变道行驶状态中,特征断面包含变道开始点、越线点及变道结束点,如图2,图中纵坐标l为车辆距车道线的距离。

图2 变道特征点示意Fig. 2 Schematic diagram of lane-changing feature points
2.1.2 特征断面间距Δd
特征断面间距Δd指变道特征点与施工路段过渡段起点(以下简称“施工路段起点”)之间沿道路中线的距离,按式(1)计算:
Δd=dend-dstart
(1)
式中:dstart、dend分别为变道特征点、施工路段起点断面的桩号,m。
2.1.3 特征断面时距Δt
特征断面时距Δt指车辆通过变道特征点与施工路段起点的行驶时间差,按式(2)计算:
Δt=tend-tstart
(2)
式中:tstart、tend分别为车辆通过变道特征点、施工路段起点断面时刻的时间,s。
2.2 变道特征点识别
变道特征点可通过车辆横向位置进行识别[14-15]。笔者结合GPS、模拟平台数据采集系统和行车记录仪采集的视频资料,对车辆横向位置数据进行判断,以识别变道特征点。
按式(3)进行变道开始点和变道结束点识别:
{i|i∈Pstart}={i|y′i-1·y′i<0}
(3)
按式(4)进行越线点识别:
{i|i∈Pend}={i|yi=ylane}
(4)
式中:Pstart为减速起始点集合;Pend为减速终止点集合;y′i-1、y′i分别为i-1、i时刻车辆横向偏移率,m/s;yi为i时刻车辆横向位置,m;ylane为车道线的横向位置,m。
2.3 有效性判别方法
指标的有效性包括绝对有效性和相对有效性2种。
1)绝对有效性即实车实验获得的分析指标值与驾驶模拟实验获取的分析指标值相等,笔者采用非参数Wilcox检验进行指标的绝对有效性判断。Wilcox检验的原假设为2种驾驶环境中驾驶行为无显著差异。
2)相对有效性即驾驶模拟实验结果具有与实车驾驶实验结果相似或相同的趋势,笔者采用多元线性回归模型检验进行指标的相对有效性判断。当2种驾驶环境自变量回归系数符号相同时,驾驶行为随自变量的变化趋势相同,则认为该行为指标具有相对有效性。
3 实验结果
1)断面车速、特征断面间距及特征断面时距实验结果如图3。
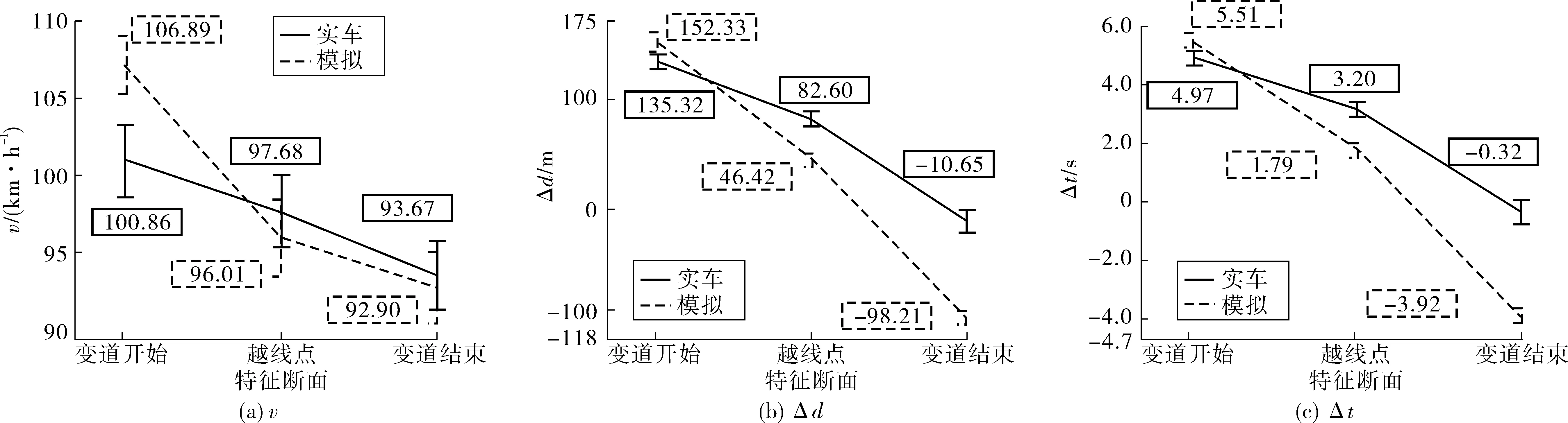
图3 断面车速v、特征断面间距Δd及特征断面时距Δt实验结果Fig. 3 Test results of spot speed v, spot spacing Δd and headway Δt
2)断面车速、特征断面间距及特征断面时距绝对有效性分析结果如表1。

表1 断面车速v、特征断面间距Δd及特征断面时距Δt绝对有效性分析结果Table 1 Analysis result of absolute validily of spot speed v, spot spacing Δd and headway Δt
3)断面车速、特征断面间距及特征断面时距相对有效性分析结果如表2。
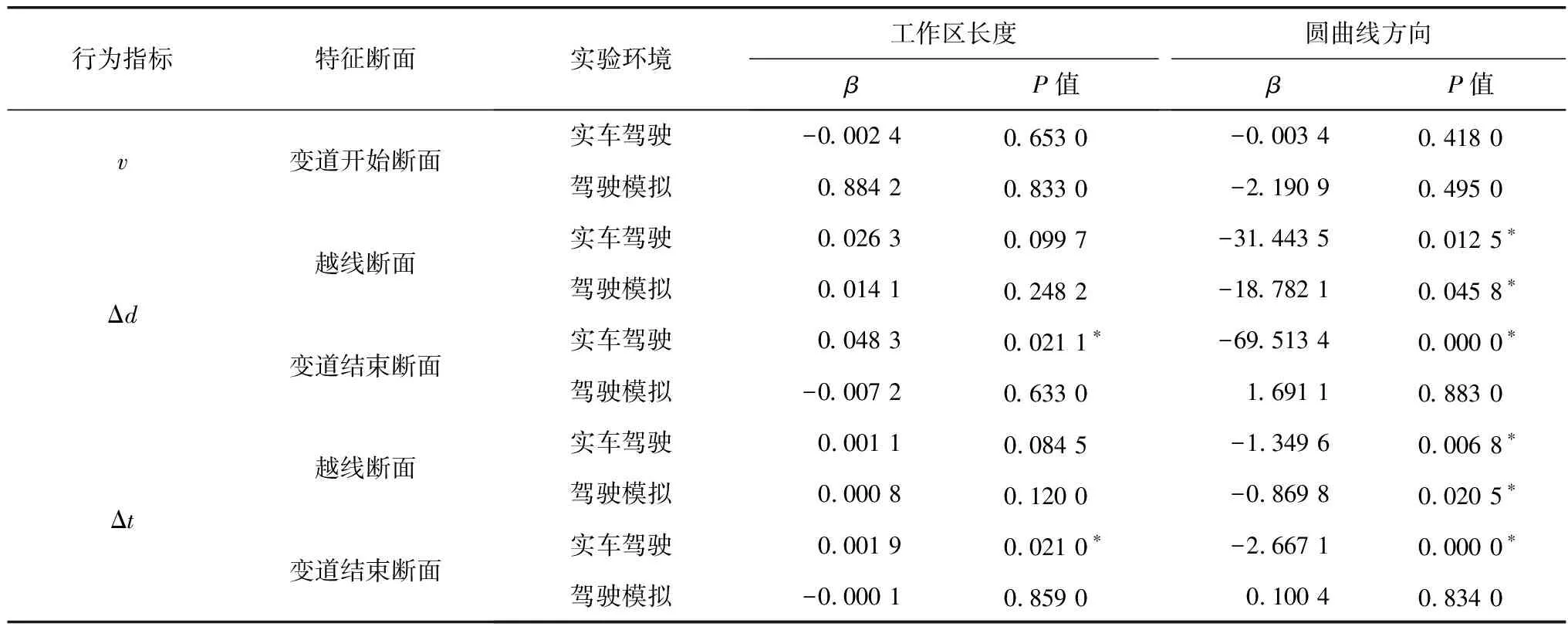
表2 断面车速v、特征断面间距Δd及特征断面时距Δt相对有效性分析结果Table 2 Analysis result of relative validily of spot speed v, spot spacing Δd and headway Δt
4 分 析
4.1 断面车速v
4.1.1 断面车速实验结果分析
由图3(a)可见:
1)各断面在不同驾驶环境中的断面车速v差距均较小,如:在变道开始断面,实车实验的比驾驶模拟实验的小5.6%;在越线断面,实车驾驶的比驾驶模拟实验的大1.7%;在变道结束断面,实车驾驶的比驾驶模拟实验的大0.8%。
2)驾驶模拟实验中驾驶人在进行强制变道行为时减速较剧烈,变道过程中车速较高,表现出相对激进的驾驶行为。
4.1.2 断面车速绝对有效性分析
由表1可见:在变道开始断面,2种驾驶环境的断面车速具有显著的差别(P=0.012 4);越线断面及变道结束断面,2种驾驶环境的断面车速的差异均不显著,即具备统计显著的绝对有效性。
4.1.3 断面车速相对有效性分析
由表2可见:在变道开始断面,工作区长度、圆曲线方向对断面车速影响不显著。因此,不可通过所选自变量来判断变道开始断面车速的相对有效性。模拟环境中变道开始断面车速较高,分析原因可能是驾驶人在相对宽松和安全的模拟环境中表现出相对激进的驾驶行为。
4.2 特征断面间距Δ d
4.2.1 特征断面间距实验结果分析
由图3(b)可见:
1)在变道开始断面,实车驾驶实验的Δd比驾驶模拟实验的小11.2%;在越线断面,实车驾驶实验的Δd比驾驶模拟实验的大77.94%。
2)2种驾驶实验中,变道结束断面分别位于上游过渡段起点断面的上游和下游。驾驶模拟实验中,驾驶人在更靠近施工路段工作区的地方结束变道行为,这可能造成车辆与交通附属设施的碰撞,表现出较为激进的驾驶行为。分析原因可能是由于相对安全的模拟驾驶环境影响了驾驶人对行车风险的认知而造成的。该结论与H.B.EKANAYAKE等[16]的研究结论相符。
4.2.2 特征断面间距绝对有效性分析
由表1可见:不同驾驶环境中变道开始断面至施工路段开始断面之间间距没有显著差异(P=0.368 1),变道开始断面的特征断面间距Δd具有绝对有效性。
4.2.3 特征断面间距相对有效性分析
由表2可见:不同驾驶环境中越线断面至施工路段起点断面之间的间距均受圆曲线方向的显著影响,且影响趋势相同。说明越线断面、变道结束断面的特征断面间距Δd具有相对有效性。
4.3 特征断面时距Δ t
4.3.1 特征断面时距实验结果分析
由图3(c)可见:
1)在变道开始断面,实车驾驶实验的Δt比驾驶模拟实验的小9.8%;在越线断面,实车驾驶实验的Δt比驾驶模拟实验的大78.8%;在变道结束断面,实车驾驶实验的Δt比驾驶模拟实验的大91.8%。
2)不同驾驶环境中特征断面时距Δt差别较大。同样,驾驶模拟实验中驾驶人表现出了更加激进的驾驶行为。
4.3.2 特征断面时距绝对有效性分析
由表1可见:不同驾驶环境中变道开始断面至施工路段开始断面之间时距没有显著差异(P=0.339 3),变道开始断面的特征断面时距Δt具有绝对有效性。
4.3.3 特征断面时距相对有效性分析
由表2可见:不同驾驶环境中越线断面至施工路段起点断面之间的时距均受圆曲线方向的显著影响,且影响趋势相同。说明越线断面、变道结束断面的特征断面时距Δt具有相对有效性。
4 结 语
笔者开展了实车驾驶实验和驾驶模拟实验,分析了高速公路改扩建期间强制变道行为驾驶模拟的有效性,得到以下主要结论:
1)断面车速、特征断面间距以及特征断面时距均在一定程度上表现出了驾驶模拟有效性。其中:越线断面、变道结束断面的断面车速具有绝对有效性;变道开始断面的特征断面间距、时距具有绝对有效性,越线断面、变道结束断面的特征断面间距、时距具有相对有效性。从而验证了驾驶模拟器在高速公路改扩建强制变道行为研究中的有效性。
2)驾驶人在驾驶模拟环境中表现出了较为激进的驾驶行为,例如急减速、较高车速等。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
内燃机与配件(2021年11期)2021-09-10
内燃机与配件(2020年20期)2020-09-10
客车技术与研究(2019年2期)2019-11-26
汽车维修与保养(2019年1期)2019-05-05
汽车与运动(2017年11期)2018-05-22
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
现代职业教育·中职中专(2017年11期)2017-07-09
电子技术与软件工程(2016年22期)2016-12-26