
一阶倒立摆系统建模与仿真研究
2021-09-27 08:57徐州工程学院电气与控制工程学院
电子世界 2021年15期
徐州工程学院电气与控制工程学院 于 蕾 方 蒽 纪 雯
本文介绍的一阶倒立摆系统建模与仿真,是“系统建模与仿真”课程中的一个重要应用案例,建模过程中考虑以下几个问题:单一刚性铰链、两自由度动力学问题;经典力学的牛顿第二定律或拉格朗日力学的拉格朗日方程;PID控制器的基本架构及各环节的作用。
倒立摆建模部分主要是根据倒立摆系统的受力分析原理进行研究,结合物理力学及数学知识,完成理论公式的推导、原始模型建立以及模型的简化与模型转换;仿真部分通过MATLAB/SIMULINK软件来完成,一是编写MATLAB程序代码,二是进行SIMULINK仿真。
1 建模与仿真
倒立摆系统的受力分析原理如图1所示。倒立摆系统的相关参数:小车质量M=1kg、摆杆质量m=1kg、摆杆长度2l=0.6m、重力加速度g=10m/s2、小车水平受力F、转动惯量J、摆角θ。建立模型如图2所示,SIMULINK仿真如图3所示。

图1 倒立摆系统受理分析图
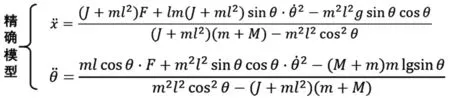
图2 系统模型
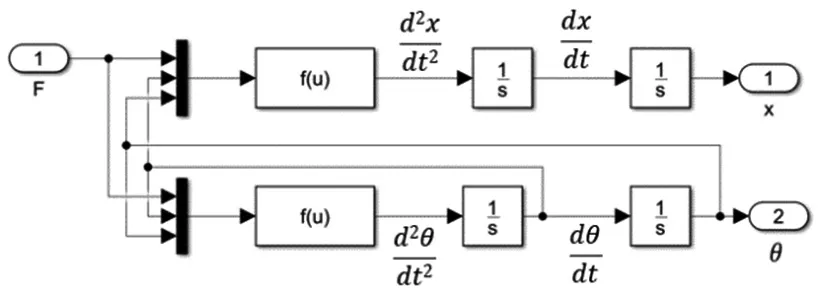
图3 SIMULINK仿真模型
2 PID控制
在PID控制部分,根据倒立摆控制系统的结构框架图,结合自控原理相关知识进行分析,分别进行单闭环与双闭环控制系统的设计。根据倒立摆系统数学模型及PID控制器传递函数进行MATLAB程序代码的编写及SIMULINK仿真,调节PID参数,使倒立摆控制系统得到良好的响应。单闭环倒立摆控制系统结构框架如图4所示,仿真模型如图5所示。双闭环倒立摆控制系统结构框架如图6所示,仿真模型如图7所示。

图4 单闭环倒立摆控制系统结构框图
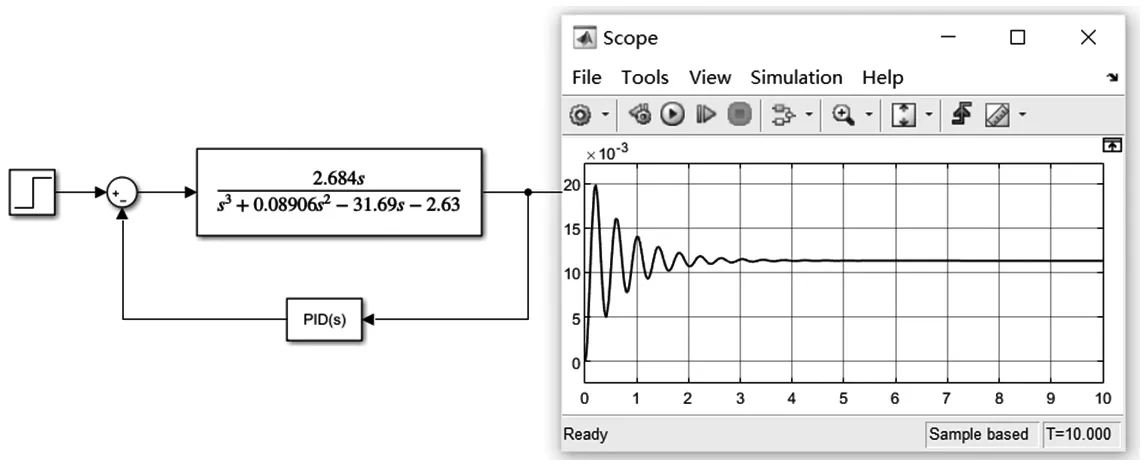
图5 单闭环仿真模型
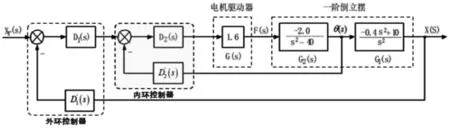
图6 双闭环倒立摆控制系统结构框图
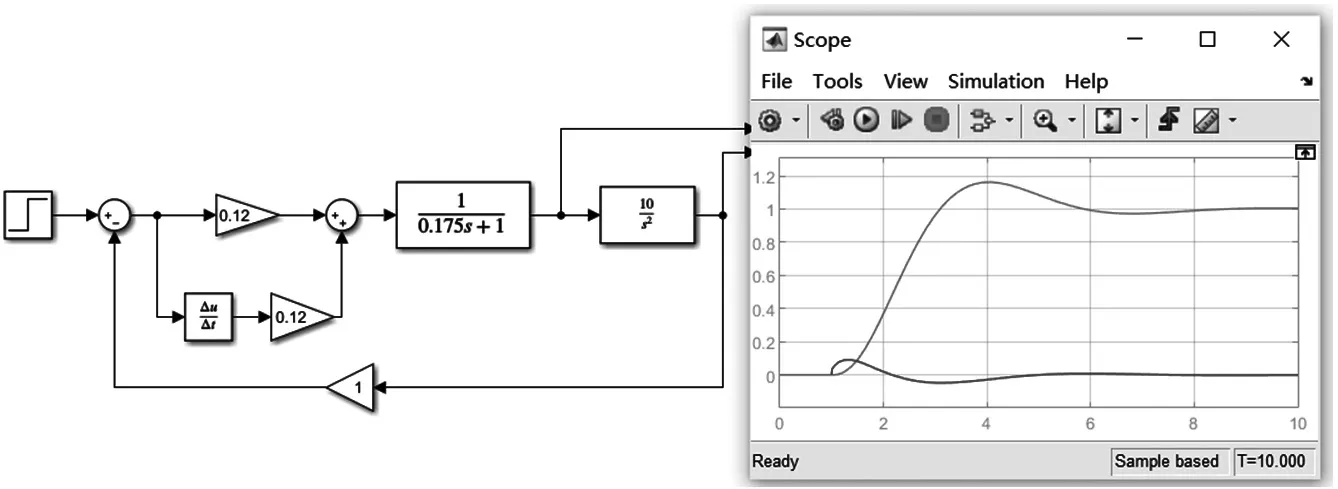
图7 双闭环仿真模型
3 思考与建议
在“新工科”工程教育的教学模式下,传统教学模式已不能满足创新型人才培养的需求,而探究性教学模式的特点是以学生为主体,其学习方式特征是“自主、探究、合作”,目的是培养学生的应用动手能力、创新思维与创新能力的形成与发展。在探究性教学过程中必须要处理好教师与学生之间的关系,既要充分体现学生在学习过程中的主体地位,以学生为中心,又要重视发挥教师在教学过程中的主导作用,以教师为主导。通过情境设定与启发思考、自主探究与协作交流、总结提高三大部分,重视学生的学习过程,重视学生“做”的过程,通过“自主、探究、合作”的方式,培养学生想学习过程中的创新思维能力及应用动手能力。
由教师精心设计教学问题,为学生创设问题情境,引导学生进行思考、自主学习。在该环节中对学生下达学习任务,提出学习要求,以学生为学习的主体,以教师为学习的引导者,开展该环节的教学活动,激发学生的学习热情。学生在明确学习任务后,成立学习小组,各小组成员分工合作、共同讨论探究,且每个学生都要有自主探究的过程。探究过程中要完成倒立摆系统建模及仿真两部分内容。
探究性教学模式是以学生为中心、以教师为主导、师生共同参与的互动性教学活动。教师根据教学内容对学生进行启发式的讲解,引导学生进行自主性地学习,学生进行分组讨论,组内成员之间、组与组之间进行相互学习及评价,学生要充分发挥学习的主动性与积极性。最后进行归纳总结,完成自主学习报告及小组报告。教师根据学生表现进行评价,分别对自主探究学习、小组分工合作、小组整体表现进行打分评价。探究性教学模式通过向学生提出问题、任务,引导、启发学生自主学习与探究,实现知识教育向认知教育的转变,激发学生的学习兴趣和求知欲,并达到培养学生的创新探索精神的目的。
探究性教学模式在分组教学时需要考虑到学生的自觉性,自觉性较强的学生,具备良好的自主学习习惯,能够切实地提高学习效率;自觉性不强的学生,可能会出现不愿自学的情况,导致课堂课下学习效率较低。因此,在具体分组实施时,应结合不同学生的前期成绩和平时表现,每个小组应包含不同层次的学生,互相督促以激发整个小组学生的学习积极性及团队意识。
探究性教学模式不能完全摈弃传统教学模式,一方面要有一定量的课堂讲授和知识训练;另一方面要根据专业特点及学生的学习水平选取合适的课题,循序渐进地开展教学活动。在教学过程中,不断丰富教学内容,培养学生的科学思维观,培养学生的自主探索意识、创新意识和团队合作意识,使学生具备一定的提出问题并解决问题的能力,基于“新工科”教学理念,培养创新型人才。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
甘肃教育(2020年4期)2020-09-11
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
数学大世界(2017年31期)2017-12-19
黑龙江电力(2017年1期)2017-05-17
新课程(2016年3期)2016-12-01
环境科技(2016年5期)2016-11-10
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
