
Android智能手机双频GNSS伪距差分动态定位性能分析
2021-09-28 06:37王颖喆陶贤露刘万科
导航定位与授时 2021年5期
王颖喆,胡 捷,陶贤露,刘万科,朱 锋
(武汉大学测绘学院,武汉 430079)
0 引言
智能手机具有普遍性、易携带性和低成本等优良特性,使得基于其所衍生出来的位置服务移动应用深受大众的欢迎。精准的时空信息是位置服务的基础,在城市复杂环境下,利用手机获取稳定的米级甚至亚米级高精度位置信息仍是目前亟需解决的问题。Google公司于2016年开放了Android 7.0及以上版本的操作系统中原始全球导航卫星系统(Global Navigation Satellite System,GNSS)观测值的获取接口,包括伪距、载波相位、多普勒和信噪比等[1],使得开发者基于GNSS观测值对手机的导航定位算法做更深层次的优化成为可能。此外,智能手机GNSS天线和芯片从单频单模向多频多模方向快速发展,例如小米公司于2018年发布了全球首款双频GPS定位手机Mi8,内置BCM47755双频GNSS芯片;华为公司于2020年发布了支持北斗三频信号的HUAWEI P40手机,内置海思Hi-1105自研GNSS芯片。GNSS原始观测值的开放和硬件模块性能的提升,极大促进了低成本终端与高精度定位算法的有机结合,这给基于手机等大众智能终端的GNSS精密导航定位研究带来了机遇与挑战[2]。
目前,国内外学者针对手机GNSS观测值特性和定位性能开展了一系列研究工作。在数据质量分析方面,由于普遍采用体积小的线性极化天线和低功耗的GNSS芯片,使得智能手机GNSS观测值的特性受到显著影响,具体表现为信号强度低、伪距多路径误差大、半周及整周周跳频繁、模糊度不具有整数特性等[3-6],从而给手机精密定位研究带来挑战。在基于GNSS观测值的定位性能方面,吴琼等分析了Mi8双频无电离层组合精密单点定位性能,在开阔环境下的静态定位精度可达米级甚至分米级,但收敛时间较长,难以满足行人实时获取位置的需求[7-8];刘万科等提出了一种通过相位历元差分约束载体历元间位置变化的单机滤波算法,有效平滑了Mi8伪距观测噪声,在开阔和较遮挡环境下平面精度可达1.5~2m[9-10];R.Eugenio等对Google Nexus 9平板和三星S8+等多款手机相位差分定位性能进行了测试,在开阔环境下通过快速静态的方式获得了分米级甚至厘米级精度的浮点解[11-12];耿江辉等将Google Nexus 9平板外接测量型天线,并校准其初始相位偏差,得到了厘米级精度的固定解[13]。
由以上研究现状可知,目前国内外学者针对手机GNSS定位算法和性能的研究多集中在理想环境和静止状态下,而在城市复杂环境中对行人和车载这两种常见应用场景的动态定位性能评估较少;其次,在实际动态环境下,GNSS相位观测值连续性差、周跳频繁,导致基于载波相位的定位算法存在模糊度收敛慢、难以固定的问题。因此,本文利用Mi8手机的双频相位历元差分观测值和多普勒观测值获得了高精度的位置变化信息,避免了对模糊度的估计,联合双频伪距观测值构建了滤波定位模型,并引入伪距差分数据,以提升手机定位的连续性和精度。在武汉市开展了较复杂场景下的行人和车载测试,验证了双频信号和伪距差分改正数对手机定位性能的提升效果。
1 伪距差分定位算法
1.1 伪距差分定位模型
GNSS伪距差分定位的观测方程如式(1)所示
(1)
δRTD=δtrop+δion+δeph+δisc
(2)

当不存在差分信息时,流动站的对流层延迟和电离层延迟分别使用Saastamoinen和 Klobuchar模型改正,L1/E1/B1I/R1/E5a信号在卫星端的硬件延迟误差可以使用广播星历提供的群延迟参数加以改正,而对L5信号的硬件延迟误差δisc,L5,则需要单独使用民用导航电文(Civil Navigation, CNAV)星历提供的L5信号时延参数ISCL5加以改正,如式(3)所示[14]
δisc,L5=TGD-ISCL5
(3)
其中,TGD为广播星历播发的群延迟参数。
多频多系统GNSS伪距差分定位函数模型如式(4)所示
(4)
其中,G代表全球定位系统(Global Positioning System, GPS),E代表欧洲伽利略卫星系统(GALILEO),J代表日本准天顶卫星系统(Quasi-Zenith Satellite System, QZSS),C代表中国北斗卫星导航系统(BeiDou Navigation Satellite System, BDS),R代表俄罗斯卫星系统GLONASS,i为卫星编号;P代表改正卫星钟差后的伪距观测值;ρ代表卫地距;δRTD为伪距差分改正数;mx、my、mz代表各卫星的线性化参数;(dxdydz)代表手机位置参数;dtG1、dtG5、dtE1、dtE5、dtJ1、dtJ5、dtC1、dtR1分别表示GPS L1、GPS L5、GALILEO E1、GALILEO E5a、QZSS L1、QZSS L5、BDS B1I和GLONASS R1频点的接收机钟差;ε为伪距观测噪声,手机的伪距观测噪声与载噪比相关性较强[5-6],因此采用载噪比定权模型[7-9]。
1.2 滤波定位模型
在本文的伪距差分卡尔曼滤波导航模型中,待估状态包含载体三维坐标(xyz)以及接收机钟差δtR,状态向量可表示为
(5)
状态更新方程如下
Xk=Φk,k-1·Xk-1+Bk-1·uk-1+Wk-1
(6)
其中,Φk,k-1为第k-1历元到第k历元的状态转移矩阵,本模型中为单位阵;Bk-1为输入系数矩阵,分别表示为
Φk,k-1=I4×4
(7)
Bk-1=I4×4·Δt
(8)
uk-1为系统方程的控制输入,本算法中为相位历元差分测速或多普勒测速计算出的历元间位置变化量(dxdydz)和接收机钟速velclk,表示为
uk-1=[dxdydzvelclk]T
(9)
Wk-1为系统噪声向量,其协方差的设置取决于历元间状态变化量的计算精度。
双频伪距差分滤波算法流程如图1所示。首先,对手机GNSS原始观测值进行粗差剔除和周跳探测等验前质量控制;其次,通过多普勒测速(Standard Point Velocity, SPV)和相位历元差分(Time-Differenced Carrier Phase,TDCP)测速得到状态变化量,完成状态更新;最后,利用手机伪距观测值与基站提供的伪距差分改正数完成量测更新,从而得到滤波结果。在城市复杂环境下,手机GNSS信号易发生中断且周跳频繁,使得模糊度参数难以准确估计,这给基于载波相位的GNSS定位算法带来了严峻的考验。因此,本文使用历元间载波相位差分观测值,以避免对模糊度参数的估计,且与时空相关的误差如大气误差等在历元差分时得以有效削弱,其残余误差可忽略不计[15]。当存在4个及以上连续跟踪的载波相位观测值时,即可估计出高精度的载体状态变化量,即位置变化量和接收机钟速;当处于恶劣环境时,由于难以探测出所有周跳或连续跟踪的载波相位观测值数少于4,因此TDCP失效,此时选择多普勒测速方法可以得到较稳定的状态变化量。通过状态变化量对绝对位置的约束可以有效平滑伪距定位的噪声,从而提高位置结果的连续性。
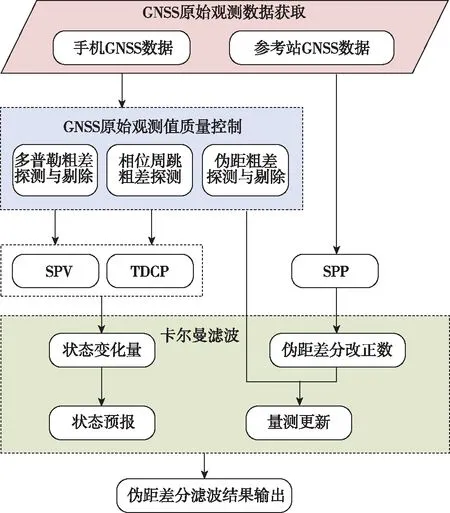
图1 伪距差分滤波算法流程图
2 伪距差分定位性能
2.1 数据说明
本文实验所用设备为双频手机Mi8,支持GPS L1+L5、GLONASS R1、GALILEO E1+E5a、BDS B1I和QZSS L1+L5五系统双频的GNSS原始观测值输出。采用课题组研制的大众行人手机导航软件Walker,分析了2组具有代表性的实测数据,分别为较复杂场景下的行人和车载动态数据,旨在对比分析单频定位和双频定位、单点定位和伪距差分定位在多场景、多模式下的定位性能。具体数据信息如表1所示,解算策略如表2所示,各算例均采用1.2节给出的滤波定位算法处理。

表1 数据基本信息
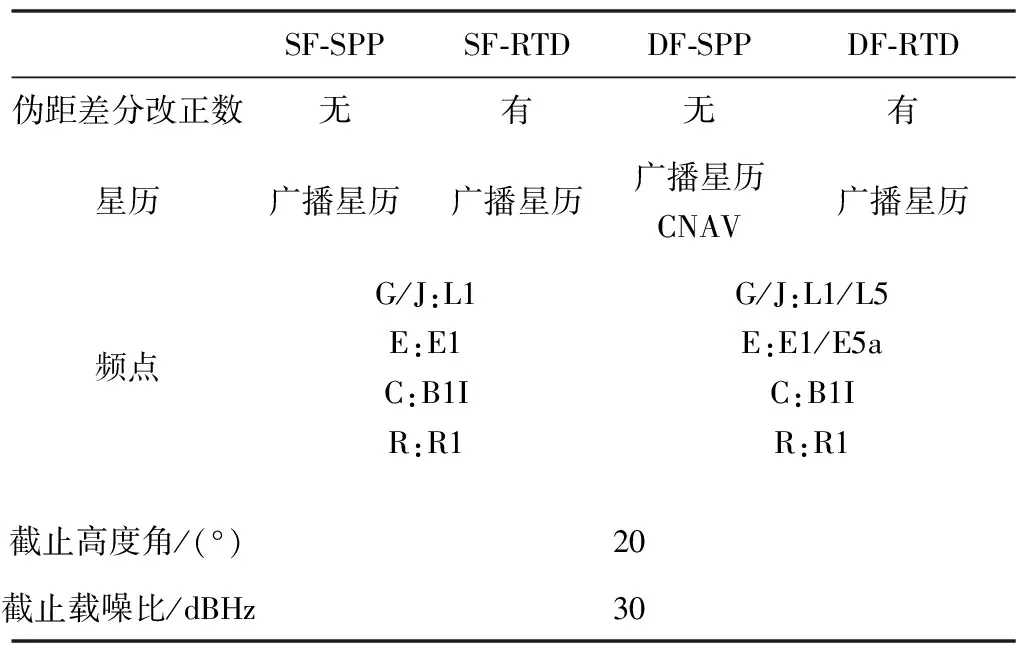
表2 解算策略
其中,SF-SPP为单频单点定位,SF-RTD为单频伪距差分定位,DF-SPP为双频单点定位,DF-RTD为双频伪距差分定位。
2.2 行人动态算例定位分析
行人动态实验的设备和环境分别如图2和图3所示,操场外侧有树荫遮挡,参考轨迹由NovAtel组合导航定位系统SPAN提供。卫星数和PDOP值序列如图4所示,经粗差探测与剔除后,能够参与定位解算的有效卫星总数大部分历元在20颗左右,其中L5/E5a频段的卫星数在7颗左右。图5和图6分别给出了单频、双频定位误差序列,可以发现:双频解算结果相比于单频解算更连续、平滑,粗差点明显减少,体现了L5/E5a信号伪距精度高、抗多路径能力强的定位优势;伪距差分定位由于削弱了大气延迟误差残余、星历误差和硬件延迟等系统误差,因此在定位结果上改正了单点定位在各方向上约0.5m的系统偏差,使得误差序列整体更接近于零,但由于无法削弱与测站环境相关的多路径等误差,因此伪距差分定位结果的误差序列与单点定位的波动幅度一致。表3给出了平面和高程方向的定位误差RMS统计值,对比单双频定位结果可知,DF-SPP的3D精度相比于SF-SPP提升了26%,DF-RTD相比于SF-RTD提升了18%;对比单点定位和伪距差分定位结果可知,SF-RTD相比于SF-SPP提升了21%,DF-RTD相比于DF-SPP提升了13%。单频单点定位的平面精度为1.43m,在加入L5/E5a信号和伪距差分改正数后,平面精度提升至0.65m。
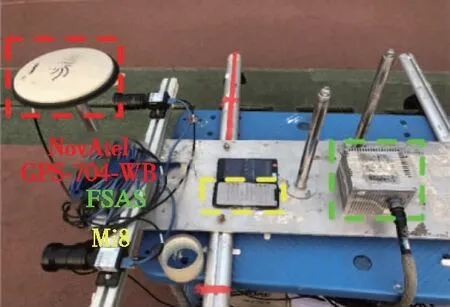
图2 行人实验设备安装示意图
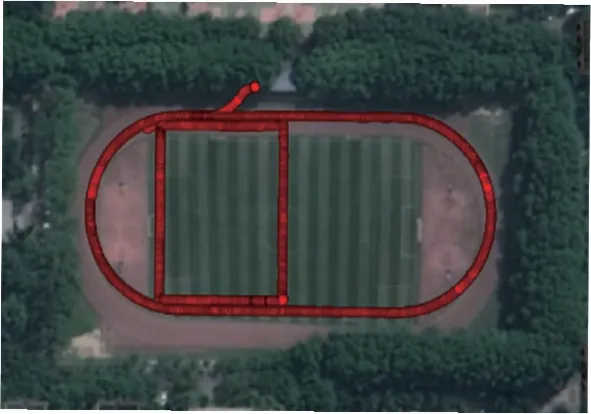
图3 行人实验路线
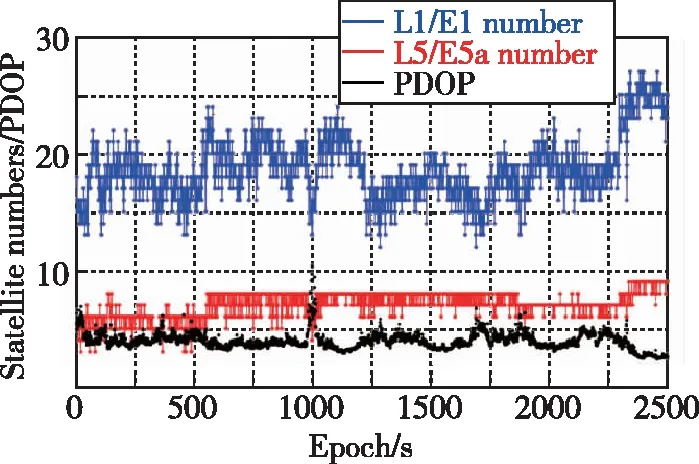
图4 行人算例的有效卫星数和PDOP序列
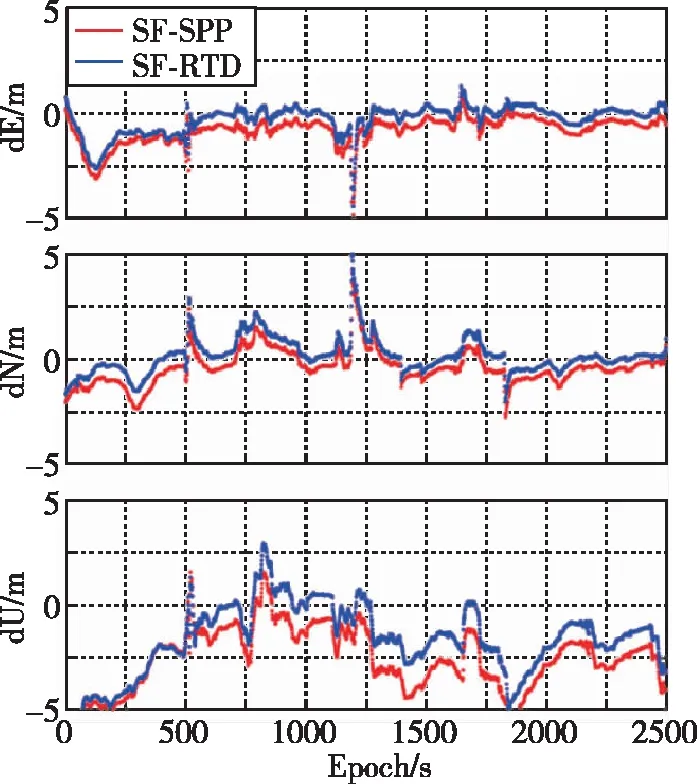
图5 行人单频定位误差序列
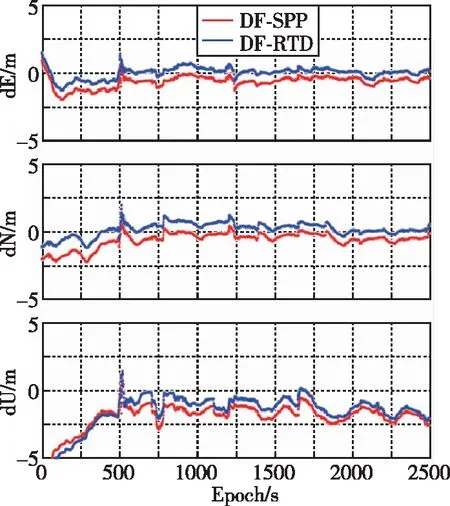
图6 行人双频定位误差序列
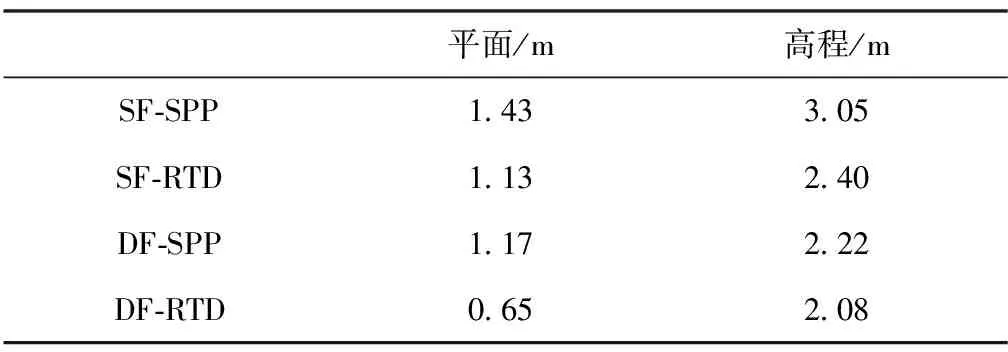
表3 行人动态定位误差RMS统计
2.3 车载动态算例定位分析
车载动态实验设备、路线和环境分别如图7、图8和图9所示,其中A、B为途径高楼、树荫等遮挡环境的场景,C、D为城市公路、郊区等一般场景。为模拟大众用户使用手机进行车载导航的实际应用场景,将Mi8放置于车内,参考轨迹由NovAtel组合导航定位系统SPAN提供。首先对Mi8在城市环境下的卫星数、PDOP和伪距噪声进行分析。如图10所示,0~800s和2400~3600s历元(黄色框)存在较严重的高楼和树荫遮挡,卫星数下降5~10颗,PDOP值明显增大。由图11和图12可知,L1频段伪距噪声偏大,粗差数较多,而L5频段由于抗多路径能力更强,伪距噪声无明显增大趋势,其伪距精度更高。

图7 车载实验设备安装示意图

图8 车载实验路线
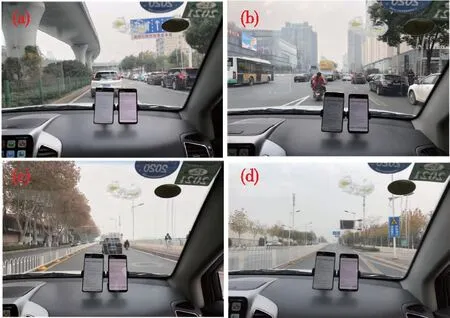
图9 车载实验场景
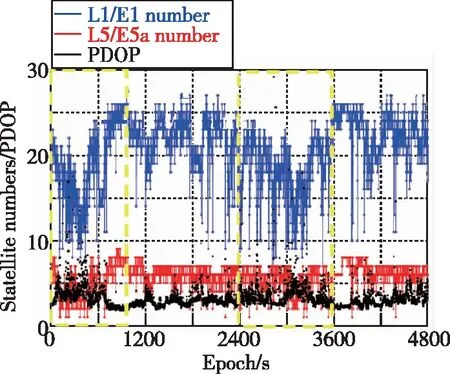
图10 车载算例的有效卫星数和PDOP序列
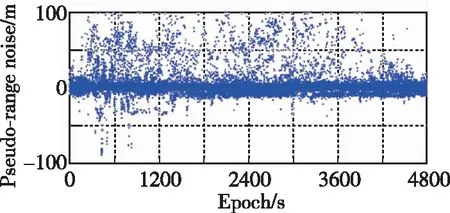
图11 L1/E1伪距噪声序列
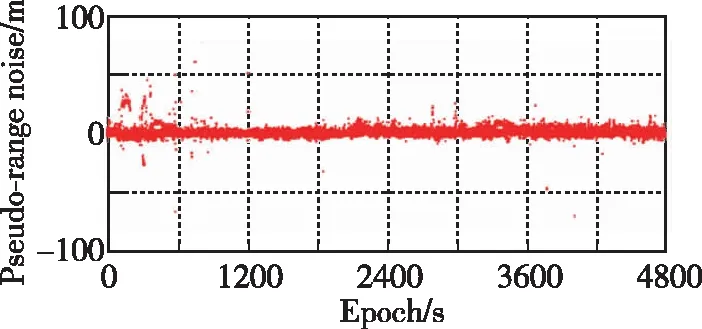
图12 L5/E5a伪距噪声序列
图13和图14分别给出了单频、双频定位的误差序列,可以发现,双频定位结果的连续性和平滑性更好,误差序列波动整体更小。而对比单点定位和伪距差分定位可知:当采用单频解算时,由于伪距差分改正数的量级较小,弱于L1/E1频段的伪距噪声,因此对系统偏差的削弱效果不明显,SF-RTD在E/N/U方向上的误差序列与SF-SPP基本重合;当使用双频解算时,伪距差分改正数进一步提高了L5/E5a频段的精度,削弱了0.2~0.4m的系统偏量,U方向的改正效果最明显。
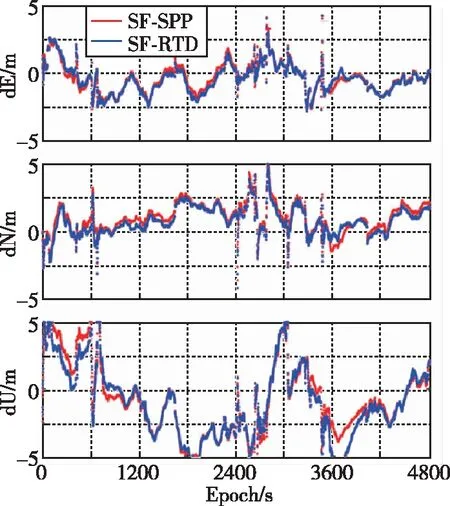
图13 车载单频定位误差序列图
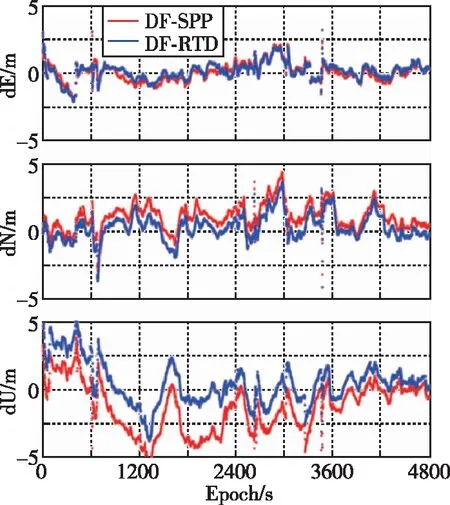
图14 车载双频定位误差序列图
表4给出了遮挡环境和全程车载动态定位误差RMS统计值。DF-SPP在遮挡和全程路段对SF-SPP分别提升了31%和19%,DF-RTD对SF-RTD分别提升了27%和52%。在环境较遮挡时,更能突出L5/E5a信号伪距精度高、抗多路径能力强的定位优势。SF-RTD在遮挡环境下与SF-SPP的3D精度相比提升了14%,在全程路段下提升了3%,DF-RTD对DF-SPP在遮挡和全程路段中分别提升了10%和42%。在环境较遮挡时,伪距差分改正数淹没在手机的伪距噪声中,对定位结果中的系统偏差改正作用不大,而在较开阔的环境中更能发挥其作用。针对全程的解算情况来看,车载动态定位平面精度为1.03m,基本可以实现车道级导航定位精度。但是,由于在车载状态下,观测环境变化显著,并且手机放置于车内,其GNSS观测值质量受到影响,因此车载定位精度整体差于行人定位精度。
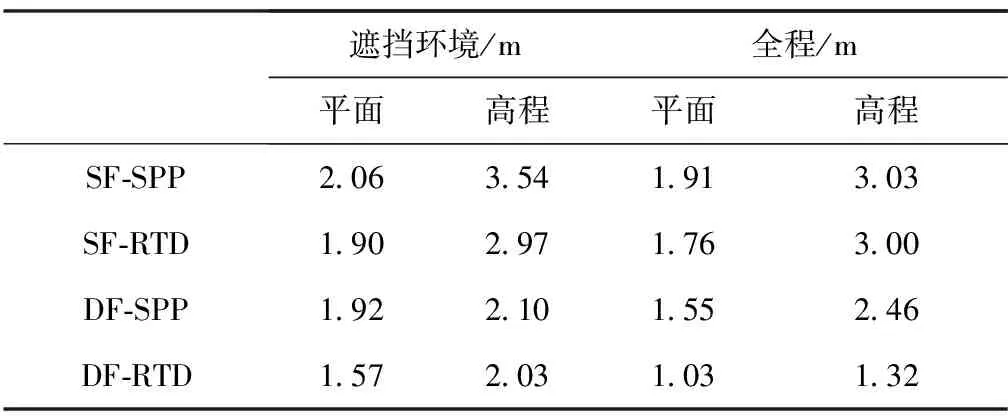
表4 车载动态定位误差RMS统计
3 结论
由于伪距单点定位算法无法满足Android智能手机用户对其所提供的导航定位服务越来越高的需求,且遮挡环境下相位连续性差、周跳频繁等因素,使得基于载波相位的定位算法稳定性较差。本文联合历元间载波相位差分观测值、多普勒观测值和伪距观测值构建了双频伪距差分滤波定位模型,行人和车载动态定位平面精度分别达到0.65m和1.03m。同时,对比分析了单频定位和双频定位、单点定位和伪距差分定位的性能,双频定位精度与单频相比提升了15%~30%,有效提高了定位结果的连续性和平滑性;伪距差分定位精度和单点定位相比提升了5%~20%,有效削弱了单点定位结果的系统性偏差。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
汽车实用技术(2022年11期)2022-06-20
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年10期)2022-06-09
导航定位学报(2022年1期)2022-02-17
云南画报(2021年5期)2021-07-22
船海工程(2021年3期)2021-06-28
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
上海师范大学学报·自然科学版(2018年3期)2018-05-14
作文与考试·小学高年级版(2017年16期)2017-08-14
