基于无人机倾斜摄影测量的三维建模
2021-09-28 09:41李鸿宇苗爱丽
中国科技纵横 2021年14期
李鸿宇 苗爱丽
(1.新疆兵团勘测设计院(集团)有限责任公司,新疆乌鲁木齐 830000;2.新疆疆海测绘院,新疆乌鲁木齐 830000)
0.引言
无需外业观测,就能得到精细的三维模型和测量成果,这是倾斜摄影技术最大的优点,而这一点正是摄影测量几十年来苦苦追求的目标。倾斜摄影所构建的三维模型,可以替代航空摄影测量中的外业人工,实现更高精度、更快速度的自动建模和智能测图。
1.无人机倾斜摄影测量技术
1.1 技术概述
倾斜摄影测量是无人机应用领域的一个重要研究方向,伴随着无人机技术的出现应运而生。无人机倾斜摄影测量技术是在同一个飞行平台上搭载一个垂直和多个倾斜相机的航空摄影测量系统,是一种可以实现多角度观测的新型航空摄影测量技术,获取的影像分辨率高、视场角广、且具有丰富的立面纹理信息,可以快速实现大规模领域的三维建模[1]。倾斜摄影影像获取的方式如图1所示。

图1 倾斜摄影影像获取方式图
1.2 技术优势
(1)真实性强:倾斜摄影测量技术比以往的正射影像,因其可以实现多个角度的摄影测量,故反映出的地物信息更加真实;
(2)高效率、低成本:该技术可以实现大规模的快速三维建模,还可以极大减少测绘外业人工,有效降低成本;
(3)丰富的立面信息:能提供丰富的建筑物表面纹理(立面信息),这对三维建模技术有着极其深远的影响。
2.建模流程及关键技术
2.1 技术流程图(图2)

图2 建模流程图
2.2 建模原理
建模软件选取行业主流软件Bently公司的Context Capture(Smart3D),Smart3D倾斜摄影测量三维建模的基本原理是利用空三加密计算出连接点,以连接点为基础构建不规则三角网TIN。进而生成三维框模,然后利用软件在三维框模中输入航摄影像资料,由软件完成自动映射,进而输出完整的被测场景三维模型[2]。
2.3 关键技术
(1)影像预处理。影像预处理包括畸变校正、匀光匀色处理。受相机系统的安装误差和镜头畸变的影响,拍摄出的影像会存在像主点偏移以及影像边缘发生畸变的情况,利用相机的内方位元素和畸变参数结合相应软件完成影像的畸变处理。受光照条件、CCD特性、光学透镜成像不均匀的影响,影像之间会存在颜色、对比度、明暗等方面的差异,需要对影像进行匀光匀色处理。
(2)区域多视影像联合平差。以倾斜摄影瞬间POS系统提供的多角度影像的外方位元素作为初始值,通过构建影像金字塔,采用金字塔由粗到细的匹配策略,在每一等级的影像上进行自动连接点提取,提取后进行光束网区域网平差,同时加入POS辅助数据、控制点坐标可建立多视影像之间的平差方程,联合解算后可保证平差结果精度。
(3)多视影像密集匹配。影像匹配是数字图像处理的核心问题,影像匹配结果直接决定空三质量。多视影像具有覆盖范围大、分辨率高的特点,同一地物会对应多个不同视角的影像,在匹配的过程中可充分利用这些冗余信息,采用多视影像密集匹配模型快速提取多视影像上特征点坐标,实现多视影像之间特征点的自动匹配,进而获取地物的三维信息。
(4)高精度DSM自动提取。多视影像经过联合区域网平差后,可自动解算出每张影像精确的外方位元素,在此基础上选择合适的多视影像匹配单元进行逐像素的密集匹配,获取成像区域超高密度点云,然后经过点云构网即可完成高精度高分辨率的DSM自动提取。
(5)模型贴图。完成上述操作流程后,需要进行模型分块,模型分块操作结束之后,需要导出Smart3D计算结果当中不够理想的部分,并利用第三方软件进行修改、编辑,重新整合数据,确保数据的有效性、准确性。最后利用Smart3D的回炉功能重新修改三维模型,并输出新的结果,进而构建出被测场景的三维模型。
3.项目实例
3.1 概述
项目区位于新疆维吾尔自治区生产建设兵团第六师奇台农场,项目主要任务:利用无人机航空摄影测量,完成测区约12km21:1000正射影像图编制,成果用于进行土地整治及数据库建设。平面坐标系为2000国家大地坐标系,高斯—克吕格投影,中央子午线90°,3°分带;高程系统采用1985国家高程基准[3]。
本项目采用大鹏CW-30型双尾撑布局固定翼无人机作为航摄平台,该无人机具有垂直起降、全自主飞行、载荷大、结构稳定、可靠性高等特点,搭载飞拓智控FT5-2120倾斜相机进行倾斜摄影测量工作。为得到高质量、高精度的产品,本项目进行了野外控制测量,共布设47个控制点,32个作为像控点使用,15个作为检查点使用,检查点与像控点交叉均匀分布于测区。
3.2 项目精度检测和评价
利用15个检查点的实测数据与模型上读取的数据进行比对,以比对结果进行三维模型几何的精度评定。15个点比对结果统计入如表1所示。
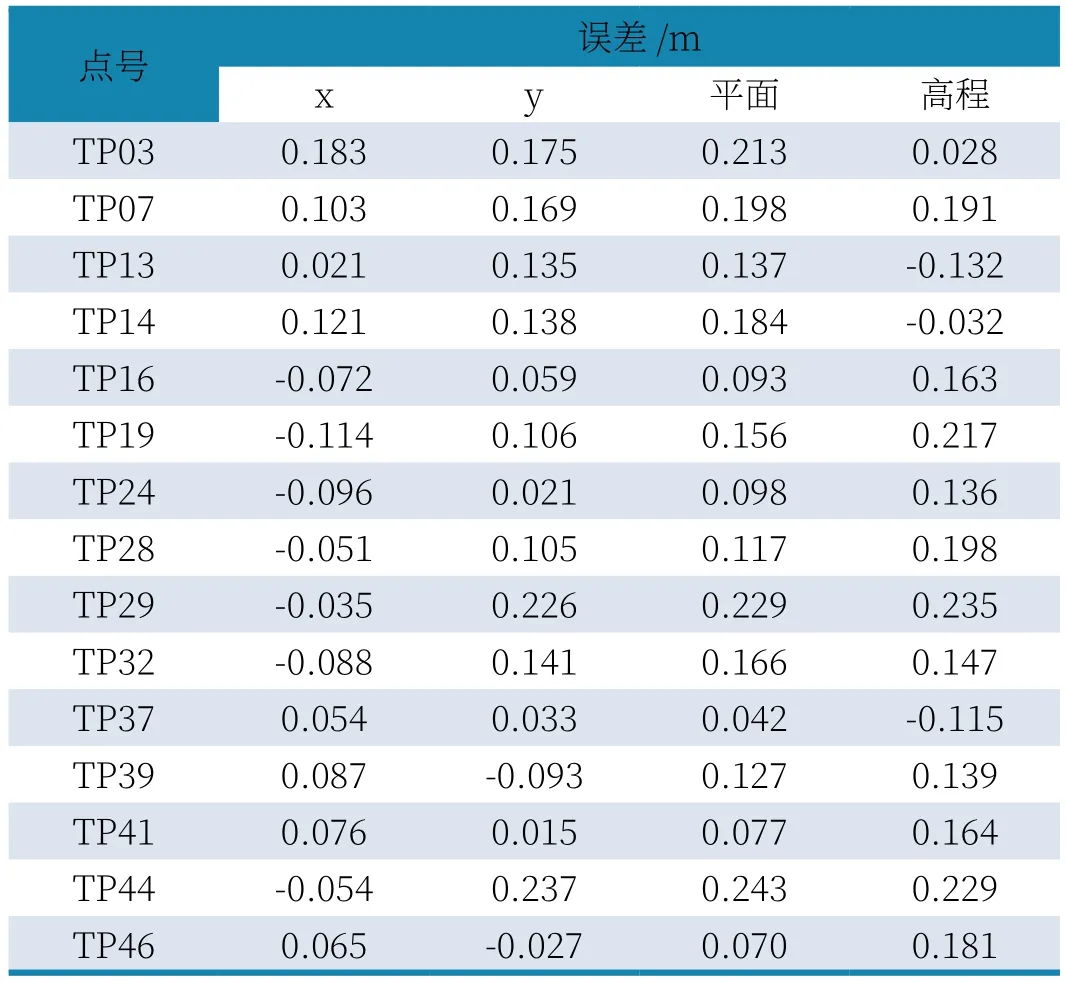
表1 三维模型精度统计表
表1显示:平面最大误差为0.243,最小误差为0.042,中误差为0.145; 高程最大误差为0.235,最小误差为0.028,中误差为0.115。由此可以判断:利用无人机倾斜摄影构建的三维模型,能满足1:1000大比例尺摄影测量三维建模的精度。
4.结语
无人机和各类倾斜摄影系统的涌现,使倾斜影像数据的获取变的越来越便捷,成本也大大降低,计算机集群、GPU、倾斜影像三维建模软件技术的进步,使得三维建模的效率将大幅提升。目前,倾斜摄影三维建模工作所涉及的无人机、倾斜摄影系统、计算机集群、三维建模软件等,已可以满足批量化倾斜影像获取和三维建模处理工作的要求,此项技术完全具备了工程化和规模化的条件。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
摄影之友(影像视觉)(2017年10期)2017-11-07
癌变·畸变·突变(2014年2期)2014-03-01
现代防御技术(2014年6期)2014-02-28
癌变·畸变·突变(2014年6期)2014-02-27
癌变·畸变·突变(2014年6期)2014-02-27
解放军生活(2009年10期)2009-11-16