
超前支护液压支架系统在综采工作面的应用
2021-09-28 23:38王晓光
山西冶金 2021年4期
王晓光
(山西宁武大运华盛老窑沟煤业有限公司,山西 宁武县 036700)
就社会经济活动中的能源消费模式而言,煤炭长期以来一直是主导能源,是中国能源安全的重要保障,并将在未来较长时期内保持主导地位。2014年,中国原煤产量达到38.7亿t,居世界首位。厚煤层开采的煤炭储量和产量占全国煤炭的40%~60%[1]中国的资源和生产。2008年,煤炭产量为27.16亿t,占世界煤炭总产量的1/3以上。这种情况意味着,在中国,厚煤层的开采世界煤矿开采技术已处于领先地位。综采技术已经实现2006年全国有77.47%的国有重点煤炭企业存在这一问题,死亡率为0.000628/‰大量煤炭被开采。由于地质条件、开采技术和开采成本等方面的限制,主要有三个方面在厚煤层开采中,常用的采矿方法有分层开采法、顶煤开采法和回采法综采采足高度技术。根据分析结果,本文对综采技术的发展进行了探讨。特别对在综采工作面中应用超前支护液压支架系统进行阐述说明。
液压支架电液控制系统是综采工作面的核心之一。可以通过自动控制,实时监测,辅助动作等功能,提高采煤工作面的生产效率、沉降速率和安全性等。目前大多数控制算法都是基于被控对象的模型。一个模型还可以用来调查被建模的属性和行为,而不会有损坏的风险或违反真实情况的技术约束。在实际使用了建模的两个基本分支:黑盒方法和第一性原理建模[2]。
第一原理建模提供了一种通用模型,该模型在最优情况下适用于整个输入和状态范围[3]。该模型是通过对被模拟情况的分析,结合物理定律[建立的。另一方面,在对实际系统进行分析时,往往存在大量未知的常数和关系。因此,第一性原理建模特别适用于参数较少的简单被控对象,以及获取被控对象的基本信息(增益范围、合适采样时间的秩等)。
国外的人们从20世纪70年代中期开始研究液压支架电液控制系统[4],经过近十年才推出该产品,20世纪90年代后系统逐渐完善。目前,德国、美国、英国、波兰、日本、法国、俄罗斯等多个国家已经有不同特点的成熟产品在推广阶段[5]。
虽然我国政府从20世纪90年代开始投入大量的技术研究,对液压支架电液控制系统进行了研究[6-7]。但至今超前支护液压支架系统在综采工作面的使用任然需要探讨,本文对搭建液压支架自主电液控制系统进行分析和阐述,进步确定超前液压支架的应用可以提高降低沉降率、提高安全性和生产效率。
1 超前支护液压支架电液控制系统simulink模型
如下页图1所示,在MATLAB/Simulink环境中,DTS200中各个部件的所有模型被合并到一个单独的块中。该块具有与实际设备相同的输入和输出。因此,它包含了所有输入和输出。得到的DTS200装置模型的Simulink模块如图2所示。该模型被设计为一个屏蔽子系统,用户只需要输入必要的初始状态。初始状态是各个液压支架的初始位和初始阀门位置以及阀门参数k的相应值。掩蔽子系统和子系统也被用于模拟电站的各个部分。阀态子系统的内部结构如下页图2所示。这种层次结构有助于保持控制结构清晰。

图1 DTS200的Simulink模型块

图2 阀门状态子系统的内部结构
2 PID控制
通过控制实验对Simulink模型进行了验证,并探讨了控制器在控制过程中的非线性处理能力。很多作者都研究过液压系统的控制,但在大多数情况下,泵都被用作驱动器。
本文所考虑的实验结构:p1泵产生t1槽的流量恒定。罐t1和t2之间的阀门V1被打开到一个恒定的位置。阀门V 4(从罐t1泄漏)和V 2(罐t2和t3的互连)关闭。控制的目标是利用阀门V5作为执行器来驱动t2水箱的水位。需要注意的是,阀V5的特性是非线性的,包含一个大的滞后。系统的静态特性如图3所示。
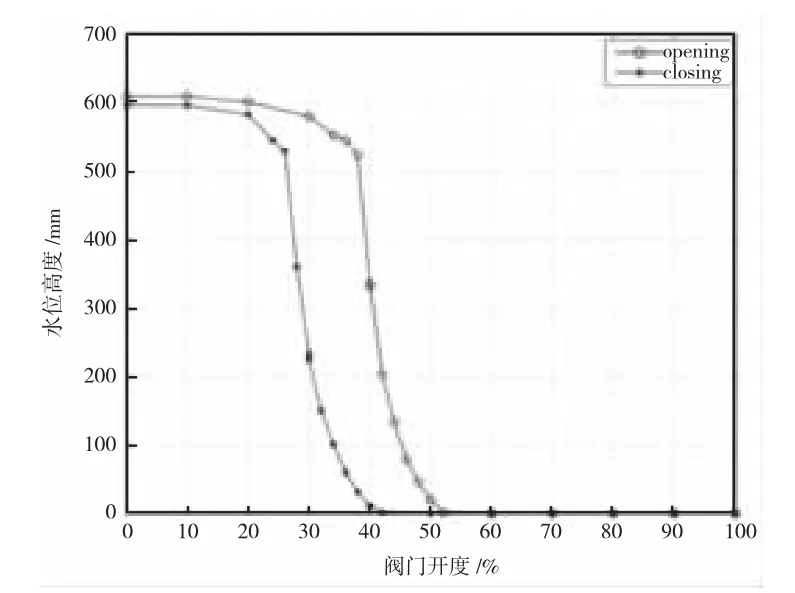
图3 被控系统的静态特性
图3可以看出,阀门处于关闭状态或微开状态位置导致液位饱和达到最大值。当油箱t1中的水位达到约600 mm时,启动安全电路,停止泵p1以防止油箱溢出。当水位下降时,重新启动抽水。另一方面,阀门打开到50%以上会导致油箱的排空。只有大约25%~50%的范围才能达到所需的稳定状态。但在这个范围内可以观察到一个很大的滞后,包络线非常陡峭。
首先采用经典PID控制器对被控对象进行控制。将控制器参数调整到最小准则,并利用MATLAB函数fminsearch实现该任务。该函数使用Nelder-Mead单纯形法寻找准则最小值。控制过程如图4所示。即使阀门位置(控制信号)平滑变化,输出也不是那么平滑。这与克服阀的迟滞现象是一致的。

图4 DTS200最优PID控制
3 线性模型预测控制
将随机信号应用到系统输入中,建立了系统的线性模型,并将线性化模型的参数应用到MPC控制器中。Simulink控制方案如图5所示。

图5 MPC原理图
使用来自STuMPCoL库的控制器来执行控制任务。采用20个样本的控制和预测水平的二次准则计算控制信号,并采用水平后退策略。MPC较好地处理了滞后的交叉,但另一方面控制信号在稳态附近振荡。
4 仿真结果
本文给出了液压系统的Simulink模型。本文考虑了Amira DTS200液压支架系统,但所采用的技术可以很容易地推广到广泛的液压系统。尽管理想模型的简单性,实时系统包含了一些非线性,这些非线性包含了系统的复杂性。阀门的滞回在控制系统的行为中起着特别大的作用。
设计了PID和MPC控制器对系统进行控制,验证了模型对控制器设计的可用性。采用全局搜索优化的线性MPC方法得到了最优控制性能。控制过程的进一步改进可以通过非线性控制器的微调和其他全局优化方法来实现。
5 综采区液压支架系统应用结果
液压支架系统主要应用于超前支护。综采工作面在作业过程中,液压支架可以实时超前支护,实时的起到了支护作用,可以有效的降低综采工作面的沉降率。如图6所示,前40 d中,当不采用液压支架超前支护综采工作面的沉降率如图6-1所示值为38 mm/d,而使用液压支架超前支护的综采工作面沉降率如图6-2所示小于10 mm/d,且沉降区更早达到地质稳定。

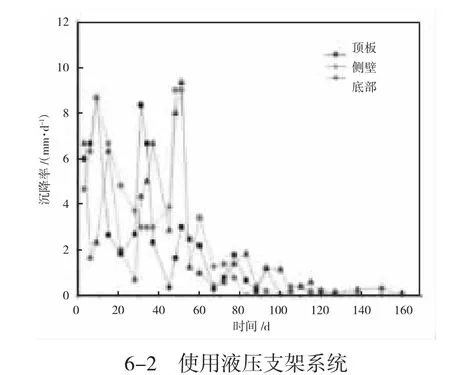
图6 顶板,侧壁和底部的降率
6 结论
在综采工作面超前支护液压系统采用本文的控制系统,不仅提高了安全性,且大大的降低了综采工作面的沉降速率,最大可降低30%,电-液压控制系统成功地为煤矿的安全、高效开采奠定了基础,改进了煤矿的安全、高效开采显著提高了国内综采工作面自动化水平。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
流程工业(2022年3期)2022-06-23
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
环球时报(2020-08-11)2020-08-11
专用汽车(2016年4期)2016-03-01
中学科技(2014年11期)2014-12-25
太空探索(2014年3期)2014-07-10
