基于旋翼无人机近地面空间应急物联网节点动态协同部署
2021-09-28 07:20王巍彭力赵继军朱天宇崔益豪田立勤
自动化学报 2021年8期
王巍 彭力 赵继军 朱天宇 崔益豪 田立勤
物联网的快速发展给日常生活带来了便利.同时,伴随着民用无人机技术的成熟,遥感、巡检、物流、航拍等应用也丰富了人们感知世界的视角和改变世界的途径.借助无人机平台,近地面的全景立体监测较好地满足了应用需求,因此,基于无人机的近地面空间物联网得到了广泛关注,在国防、科研及民用领域中,具有很好的应用前景[1].
近地面空间物联网应具有对特定区域的全信息精准立体感知能力,在低空和地面快速、鲁棒地形成多层次立体异构网络的能力,以及安全可靠的区域应急全信息数据链,实现事件动态评估预警、资源协同调度、态势发展智能预判[2-3].目前,基于无人机平台的物联网相关研究如表1 所示.

表1 国内外相关研究Table 1 Related works
可以看出,基于无人机的物联网相关研究已成为前沿.研究者在网络部署、通信节能、无人机轨迹规划等方面都开展了卓有成效的工作,为基于无人机的感知网络、通信网络以及智能应用奠定了基础.无人机以其出色的机动性能在自然灾害、突发事件等环境的监测中得到了越来越多的关注,以此为平台的应急物联网研究也逐渐成为研究热点[15-17].目前,应急物联网中的无人机多作为空中中继节点或感知节点搭载平台出现,相关研究也并未将感知和中继结合讨论.当面对自然灾害等公共安全事件时,需要部署大量的无人机对环境进行有效感知,同时也需要无人地面移动中继对感知数据进行存储和转发.
当发生地震、洪水、泥石流等自然灾害,以及污染物泄露等公共安全事件时,应急物联网需要被快速布署以实现对特定区域的协同感知.基于无人机对受灾区域的感知类型可以分为两种,一种是分布式广域监视应用,即通过固定翼无人机或机群搭载多类感知设备实现;另一种是立体局域监视应用,即通过旋翼无人机机群搭载多类感知设备实现,旋翼无人机往往被编队或分簇应用.
在交通运输通畅的情况下,空地通信可以通过多个移动地面站和卫星中继手段,来满足应急物联网的通信需求.但是在自然灾害和公共安全事件中,往往交通运输不畅,尤其是面对重大的自然灾害时,覆盖面大,受灾程度严重,此时灾救现场需要大量的物资、燃料、人员运输车辆,道路资源的占用给移动地面站快速进入受灾区域带来了极大的挑战.应急通信保障主要通过应急通信车,而应急通信车一般都集中配置在省中心,部分省份会在地市级配置少量的应急车,当发生灾害后需要从各地调集车辆,受到道路条件、距离等限制,难以保证响应速度.不同运营商或者同一运营商的不同应急车,所采用的设备接口也各不相同,这样不利于应急通信系统之间的互联互通.此外,应急灾救所需的通信业务应首先满足对语音业务的需求,其次满足对应急物联网感知数据传输需求.综上,在自然灾害和公共安全事件中,实现对应急物联网感知数据传输的移动地面站数量较少,当需要对多个区域同时进行立体局域监视应用时,旋翼无人机编队或分簇可能只有一个移动地面站作为存储中继平台,因此研究此实际应用背景下的应急物联网节点动态协同部署问题是十分有意义的.
在此应用背景下,按需部署的无人机平台在分布区域内是大范围、队列化的,空域的分布范围较广,感测的数据量较大,与地面中继的通信距离较远.同时,地面中继需要对多簇无人机空基平台的感知数据进行有效中继,数据链路较多,且需要移动.为了在保证数据通信质量,且有效降低无人机、移动地面站的通信能耗以及移动地面站的移动能耗,实现突发事件全信息的远距离传输,本文将研究基于旋翼无人机的近地面空间应急物联网节点部署协同优化方法,实现对旋翼无人机空基平台和移动地面站部署的协同优化和更新迭代,完成感测数据的可靠中继.
1 系统模型
本文在研究中,假设基于旋翼无人机近地面空间应急物联网的能耗由四部分组成,即无人机空基平台的飞行动力能耗、无人机机载设备的运行能耗、无人机与移动地面站的无线通信能耗、以及移动地面站的移动能耗.
无人机空基平台的飞行动力能耗和无人机机载设备(如飞控、各类感知设备等) 的运行能耗主要由感知任务决定.现有应用中,随着各类高清可见光视频、红外视频等大数据量信息的出现,通信能耗极大地增加.因此,有效降低无人机与移动地面站的无线通信能耗是主要研究动机之一.与此同时,数量较少、使用频繁的移动地面站如静止在某一随机位置完成中继任务,则与各无人机群通信距离并非较优,必然会增加上述通信能耗;如静止在某一簇无人机群的最佳中继位置,此簇无人机群通信能耗较低,但其他机群的通信能耗较高.因此,通过移动地面站的合理移动,以其移动能耗的较少支出换取与各簇无人机群通信能耗的降低是主要研究动机之二.在此研究假设下,本小节构建了系统模型.
面向突发公共安全事件监测的近地面空间应急物联网是一种立体异构网络,其系统模型如图1 所示,网络共分为三层:第一层为由旋翼无人机组成的在近地面空间的移动Ad-hoc 网络,第二层为由具有数据采集转发能力的非完整约束移动地面站(Mobile earth station,MES),第三层为云端.无人机空基平台作为感知层,MES 作为sink节点和中继节点,完成近地面空间基于旋翼无人机空基平台的检测设备在能量受限条件下的远距离通信.本文重点研究两者的协同部署问题,即从基于旋翼无人机的应急物联网网络联通性、地面移动中继和无人机空基平台的相互关系角度展开,着眼于根据无人机空基平台的部署情况,实现应急物联网节点(无人机和地面移动中继) 的动态协同部署.为了突出本文的论述重点,此物联网节点的感知覆盖问题将依托其他方法解决,本文不再涉及.设在空中区域SK中,分布着K个空基监测平台(K={1,2,···,K} ⊂N+),所有监测平台按照三维Critical-square-grid 部署模型形成了L簇(L={1,2,···,L} ⊂N+),每簇包括Kl(l∈{1,2,···,L}) 个空基监测平台,K=ΣKl,由1 个MES 对此空域SK中的公共安全事件信息进行汇聚、转发.其中,t时刻MES 的坐标为(xt,yt),t时刻第j个旋翼无人机的坐标为各无人机空基平台和移动地面站的坐标可以被云端获知.经聚簇后,第i(i∈L) 簇无人机空基平台Drones cube 与当前属于本簇的移动地面站的相互关系如图2 所示.

图1 系统模型Fig.1 System model
假设空基监测平台的上行通信采用正交频分多址(Orthogonal frequency division multiple access,OFDMA),移动地面站允许同时接入的旋翼无人机空基平台数量上限为Msup.设旋翼无人机空基平台与移动地面站采用视距通信,MES 的仰角为θ,则视距通信概率可用式(1) 近似描述[18],

式中,ψ与β取决于载波频率和移动物联网所处环境的参数.
根据图2 中空基平台与移动地面站的空间关系可知,
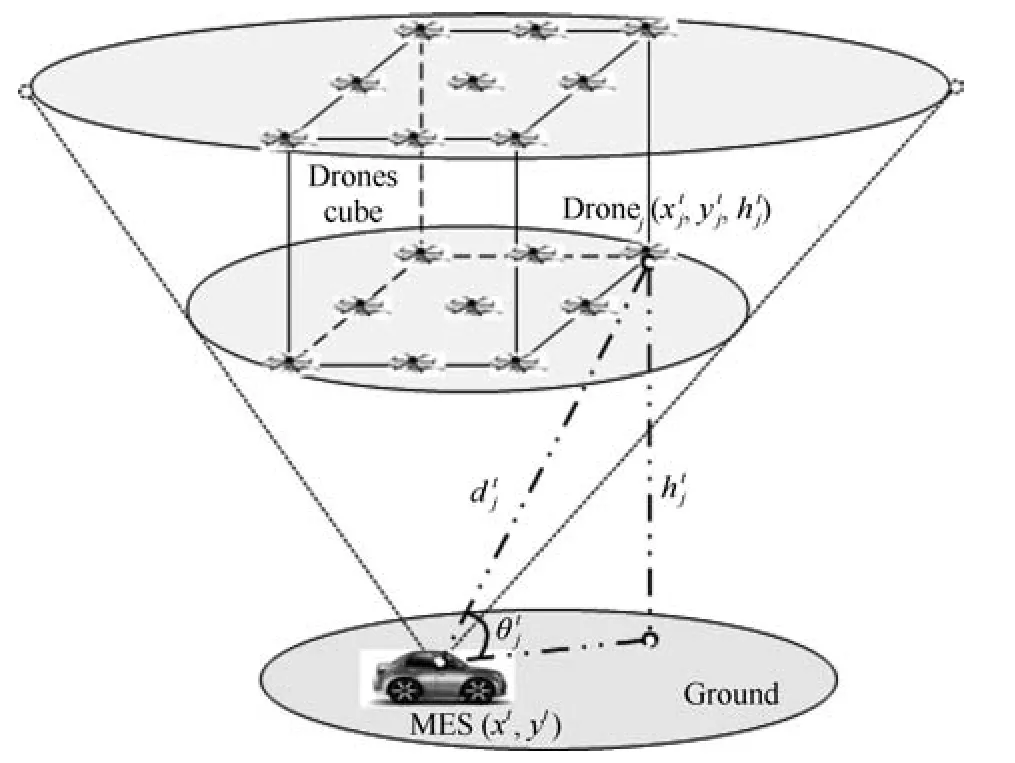
图2 位置关系Fig.2 Position relationship

2 节点动态协同部署
在基于旋翼无人机的近地面空间应急物联网中,移动地面站可以有效地解决空中感知层设备能量受限条件下的远距离通信问题,为超出直接通信范围的空中感知设备提供交换信息的可能.由于搭载IoT感知设备的旋翼无人机与移动地面站采用视距通信,监测点的密度和空域范围需求对应急物联网空地节点通信的可靠性有一定的影响.此外,在移动地面站对Drones cube 的信息中继转发过程中,节能问题也不容忽视.本节将研究Drones cube 的网格密度与最小仰角的关系、最佳路径点的计算方法以解决上述问题,实现近地面空间应急物联网空地节点动态协同部署.
2.1 网格密度
在待监测区域内,基于3D-critical-square-grid覆盖的无人机空基监测平台在空中编队组网,此时需要讨论网格布点密度(垂直密度下限ρVmin、水平密度下限ρH-min)、监测空域底层高度hmin(m)、顶层高度hmax(m) 以及最小仰角θmin(rad)间的关系.
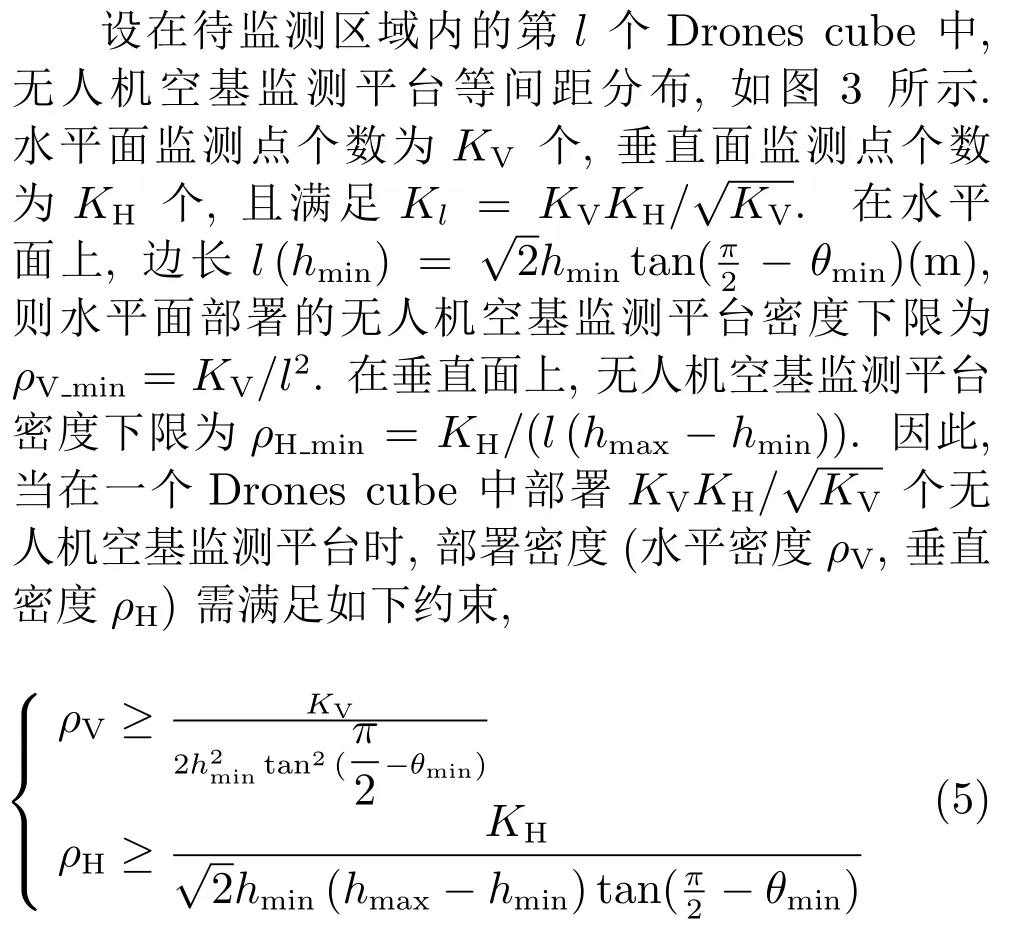

图3 Drones cube 中无人机空基监测平台立体结构Fig.3 The three-dimensional structure of the air based monitoring platform for unmanned aerial vehicle in drones cube
也可在给定部署密度和监测区域的指标下,计算Drones cube 中的水平面监测点个数KV、垂直面监测点个数KH.

2.2 最佳路径点
搭载异构感知设备的旋翼无人机与移动地面站采用视距通信时,为了使近地面空间应急物联网系统有效节能,在保证可靠通信的前提下,可以通过降低通信能耗、缩短移动地面站的移动距离等方式实现,进而延长旋翼无人机的滞空时间和移动地面站的生存周期.
在PLOS(θ)≥ε的约束下,需要最小化通信功率和移动地面站在L簇无人机空基平台Drones cube 间的移动距离,
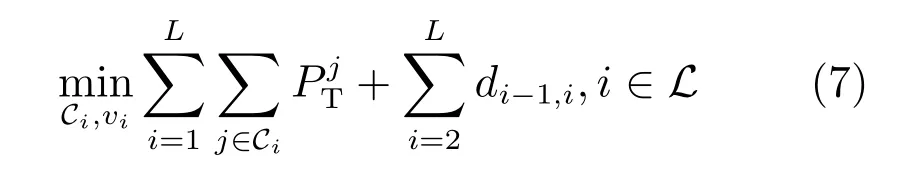
其中,di-1,i为移动地面站从i-1 簇无人机空基平台Drones cube 移动到第i簇的移动距离.
结合式(4) 可得优化问题为[1]:

其中,|Ci|为与移动地面站通信的第i簇Drones cube 中空基平台的数量.对于L簇无人机空基平台,当移动地面站按照式(8) 和(9) 优化的结果运动时,就能得到上述问题的最优解,即得到移动地面站的运动策略.结合系统模型,由式(8)和(9)可得[19],

其中,j∈Ci,i∈L,为MES 移动到第i簇Drones cube 时的坐标.
上述最小化问题是一个二次约束二次规划(Quadratically constrained quadratic program,QCQP) 问题,可描述为,
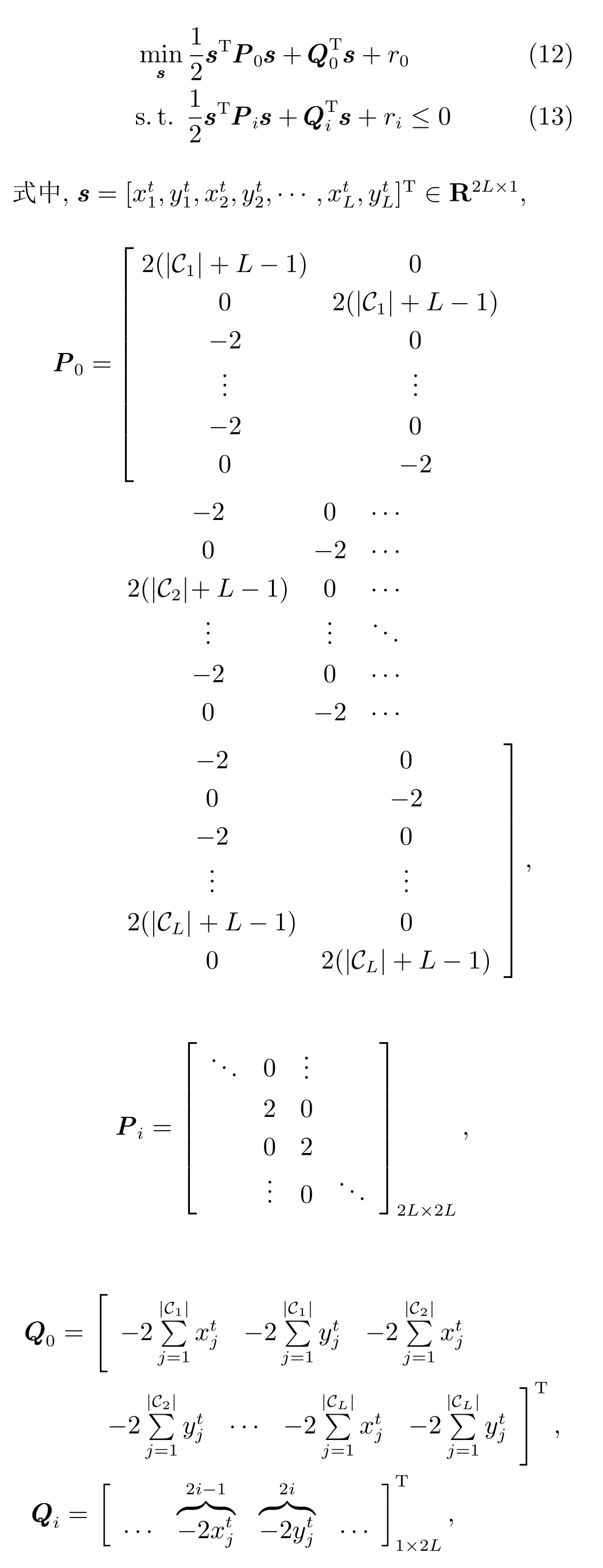

定理1.式(12) 中的二次型矩阵P0正定.
证明.根据引理1,P0为严格对角占优实方阵.又因为pij=pji,pii>0(i=1,2,···,2L),则P0的任何主子式仍为严格对角占优的,根据引理3,可知P0的任何主子式大于零,即P0的顺序主子式必大于零,二次型矩阵P0正定.
定理2.式(13) 中的矩阵Pi半正定.
证明.设矩阵Pi=(pij)2L×2L,p2i-1,2i-1=p2i,2i=2,其余元素为0,则Hermitian 矩阵Pi半正定.
根据上述的证明结论,可知式(12) 和(13) 描述的优化问题为凸二次约束二次规划问题(Convex-QCQP).
通过求解凸二次约束二次规划问题,即可在保证可靠通信的前提下,得到移动地面站MES 在L簇无人机空基平台Drones cube 间的最佳路径点(i∈L),降低通信能耗的同时缩短移动地面站的移动距离,进而延长了旋翼无人机的滞空时间和移动地面站的生存周期.此外,通过算法的迭代也可适应由旋翼无人机空基平台飘移带来的网络拓扑结构微弱变化的影响,在保持近地面空间应急物联网的通信动态节能的前提下,使得具有移动地面站的最佳路径点得到实时更新.
算法1.近地面空间应急物联网的移动地面站最佳路径点更新算法

3 实验与分析
在面向突发公共安全事件监测的近地面空间应急物联网中,移动地面站MES 可以有效地解决旋翼无人机能量受限条件下的远距离通信问题,为超出直接通信范围的旋翼无人机提供交换信息的可能.此时,网络的能耗主要来自于MES 与旋翼无人机的通信以及MES 的移动,因此,本小节将从移动能耗和通信能耗两方面开展实验与分析.
仿真实验中,设近地面空间应急物联网的旋翼无人机空基平台被初始部署在0.5×0.5(km2) 的空域内,飞行高度0.10~0.50(km),仿真参数如表2所示.

表2 仿真参数Table 2 Simulation parameters
图4 展示了不同分布的4 簇Drones cube,应用K近邻方法和本文方法确定的最佳路径点.实验中每簇Drones cube 包括27 个空基监测平台,Drones 间距10(m),Drones cube 间距D(m),按照三维Critical-square-grid 部署模型进行部署.图中“○” 表示Drones cube 中的无人机监测平台,“◆” 表示根据本文所提出的协同优化方法计算得到的在各Drones cube 间进行监测数据中继转发的最佳路径点,“*” 表示基于K近邻方法计算得到的在各Drones cube 间进行监测数据中继转发的最佳路径点.可以看出,在Drones cube 的不同分布下,相比较基于K近邻方法得到的最佳路径点,基于本文方法得到的最佳路径点有向对称中心汇聚的趋势.特别是当Drones cube 的间距D较大时,此特征较为明显.通过汇聚作用,减小移动地面站MES 在不同簇之间的移动距离,降低移动能耗,进而提高移动地面站的生存周期.


图4 不同分布的最佳路径点(hmin=160 m)Fig.4 The optimal path points in different distribution condition (hmin=160 m)
设t时刻MES 的位置、速度分别为pt=本文仅讨论面向非突发状况的MES 数据中继,因此假设其运动状态稳定,速度vt恒定.此时,MES 的移动能耗主要由路径点变化决定.设t时时刻MES 由最佳路径点运动到t+1 时刻的最佳路径点,位移为Di,l=pt+1-pt=,则移动能耗为[20],Ei,l(Di,l,vt)=,与MES 的移动距离正相关.
图5 展示了在上述实验中应用K近邻方法和本文方法对MES 移动距离的定量化影响.针对直线、三角和圆形分布,MES 的移动距离在两种方法的影响下,都表现出随Drones cube 间距D增大的线性增长.但基于本文方法的移动距离增加速率较小,使得两种方法下的移动距离差线性增加.以K近邻方法为基准方法,通过计算两种方法下的MES 移动距离差和K近邻方法下的移动距离的比值ratio=12.9%,表明K近邻方法下的MES 移动距离增长率是本文方法下的MES 移动距离增长率的1.148 倍,因此,当Drones cube 大间距部署时,本文方法对降低MES 移动能耗是十分有效的,此结论与上述对最佳路径点的汇聚作用定性分析是一致的.

图5 三种Drones cube 分布下的MES 移动距离Fig.5 MES moving distance under three kinds of drones cube distribution
此外,实验中还对Drones cube 的网格布点密度(垂直密度下限ρVmin、水平密度下限ρH-min)、底层高度H=hmin参数进行了调整,ρV-min=ρHmin∈[0.03,0.1875],H∈[100,500],并基于K近邻方法和本文方法,进行了相似实验.实验结果表明,参数的变化对上述的结论无显著影响,在确定的近地面空间应急物联网节点部署协同优化方法下,Drones cube 的间距D是影响MES 移动能耗的主要参数.
为了进一步探讨本文算法随优化问题规模增加导致的时间复杂度变化,在仿真平台中通过测试程序,对算法运行时长进行统计,数据如表3、表4 所示.
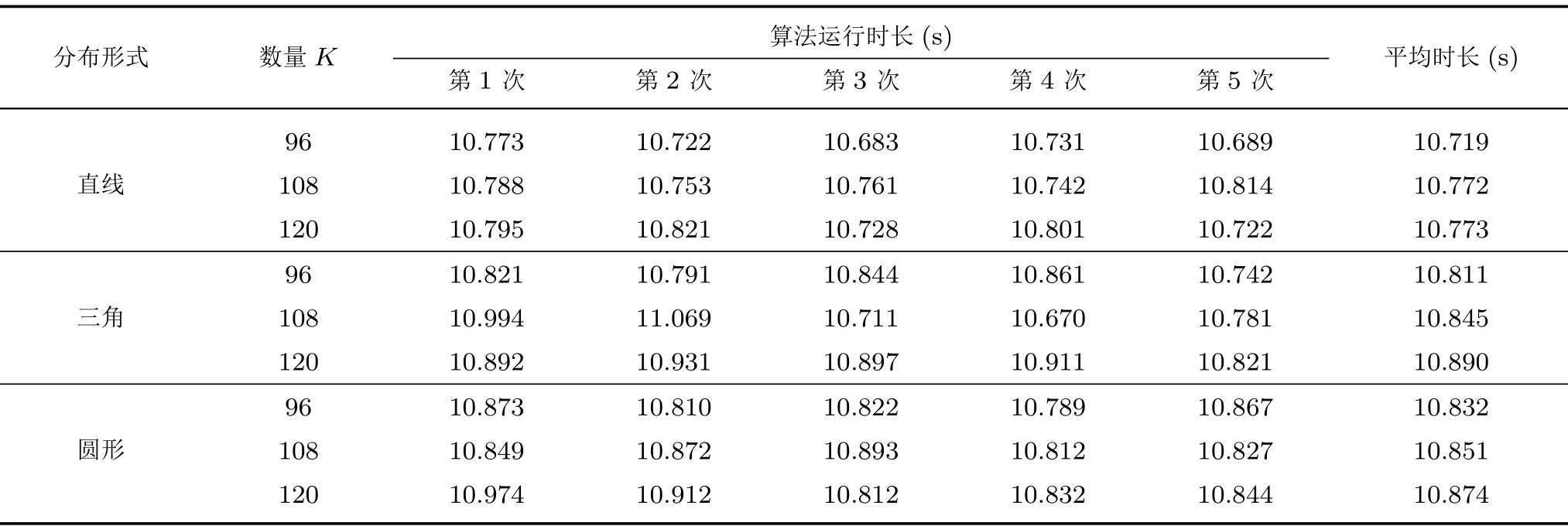
表3 旋翼无人机数量与算法运行时长Table 3 Number of drones and algorithm running time

表4 Drones cube 簇数与算法运行时长Table 4 Number of drones cube and algorithm running time
表3 展示了Drones cube 的簇数L=4 时,旋翼无人机的数量与算法运行时长的关系.可以看出算法运行平均运行时长随无人机数量增加而增长.三种分布相比较,圆形分布下的算法运行平均时长与直线分布情况相比有所增加,主要是分布情况复杂所致.表4 展示了旋翼无人机数量K=108 时,Drones cube 的簇数与算法运行时长的关系.实验中针对各种情况分别运行5 次算法,可以看出随着簇数L的增加,算法运行平均运行时长均有所增长,说明算法的时间复杂度随优化问题规模增加.根据文献[21-22],通过分析可知本文提出的核心算法时间复杂度为O(L3.5K).Drones cube 的簇数对算
法的性能影响较大,因此在使用本文所提出算法时,应对簇数加以限制.
图6 展示了4 簇Drones cube 与位于最佳路径点的MES 通信时的能耗变化.其中图6(a)~6(c) 为对称型规则分布情况,4 簇Drones cube 的总传输能量随部署间距D的增大而非线性增长,图6(d) 为非对称随机分布情况,由于Drones cube 的随机部署,因此静态通信能量变化无明显规律.为了更进一步展现各簇的传输能量差异,本文以D=50(m) 和D=100(m) 的情况为例,如图6(a)~6(c) 中的两个子图所示,分析近地面空间应急物联网通信能耗的纵向不均衡性[20].子图中“■”和“▲” 分别为基于本文方法和K近邻方法的4 簇Drones cube 的通信能耗.可以看出,基于本文方法,直线分布和三角分布情况下,各簇Drones cube间存在通信能耗的纵向不均衡现象.这主要是由于本文方法得到的最佳路径点有向对称中心汇聚的趋势,特别是当Drones cube 的间距D较大时,不均衡现象较强.对于直线分布,位于两端的Drones cube 距离其对称中心较远,对于三角分布,位于角点的Drones cube 距离其对称中心较远,因此通信能耗相比较其他位置的Drones cube 较高.而圆形分布情况下,位于圆上的Drones cube 距离其对称中心相同,因此不存在纵向不均衡现象.此外,在图6(d) 所示的Drones cube 随机分布情况下,由于各簇Drones cube 位置随机,无明显对称中心,因此各簇均表现出纵向不均衡现象.因此,在实际使用中,应尽可能采用圆形分布以避免纵向不均衡现象.

图6 不同分布的Drones cube 静态通信能量(H=160 m)Fig.6 Static communication energy under different kinds of Drones cube distribution (H=160 m)
对于近地面空间应急物联网的各簇Drones cube,其通信能耗的纵向不均衡性将降低网络整体生存周期,因此需度量其纵向不均衡性,并分析其对网络的影响.定义静态通信能耗不均衡率κ为所有Drones cube 最大和最小通信能量之差与剩余能量的比值.以直线分布为例,计算κ随Drones cube的间距D和通信时长t的关系,如图7 所示.

图7 直线分布Drones cube 静态通信能耗纵向不均衡率Fig.7 Vertical disequilibrium rate of energy consumption in Drones cube static communication under linear distribution
图7 展示了Drones cube 直线分布时κ随间距D非线性增加,随时间t线性增加的趋势.尽管各簇Drones cube 通信能耗的不均衡率有所上升,但由于空基监测平台应用于突发状况,且空中悬停飞行能耗使得其一般应用于短时监测,在较短时间内,t对κ的影响不大.根据本文设定的部署空域0.5×0.5(km2),取D=400(m),则纵向不均衡率κ为0.005725%.对κ与D的关系进行拟合,可知当D >6 000(m) 时,κ >1%,因此,本文提出的方法在中远距离范围内,对通信能耗纵向不均衡性影响不大,适用于中远距离通信.
本文方法是以移动能耗和通信能耗的协同优化为目标,而非K近邻方法仅考虑通信能耗,因此各簇Drones cube 通信能耗有所提高,但增加不大.图8 展示了在直线、三角和圆形分布下,以K近邻方法为参考方法,基于本文方法的各簇Drones cube 通信能耗增长率.可以看出,直线分布的Drones cube部署方法,其通信能耗增加最快,当D=400(m)时,通信能耗增长率仅为0.12%,相比较于图5 所示的K近邻方法下移动距离的增长率ratio=12.9%,本文提出的协同优化方法是可行的.同时,在实际使用中,应尽可能采用圆形分布以降低通信能耗增长率.

图8 三种Drones cube 分布下的静态通信能耗增长率Fig.8 Energy consumption growth rate of static communication under three kinds of Drones cube distribution
在移动地面站对空中Drones cube 监测平台进行信息中继转发的过程中,Drones cube 的网格布点密度(垂直密度下限ρV-min、水平密度下限ρH-min)、底层高度H=hmin、及其间隔距离D的变化都将对通信能耗产生影响.面向突发公共安全事件,按照无人机空基监测平台的部署要求和监测精度,在一定的近地面监测空域SK内,假设Drones cube 的网格布点密度为定值,本文实验中取ρV-min=ρH-min=0.0675,讨论Drones cube 底层高度H、间隔距离D变化时对通信能耗的影响.根据上述分析,相比较于K近邻方法,不同分布下应用本文方法确定的最佳路径点,均具有向对称中心汇聚的趋势,因此本文中将以直线分布的Drones cube 为例,分析其与移动地面站通信时的总传输能耗、H和D的关系,如图9 所示.
图9(a)中列出了H={150,160,170,180,190,200}(m),D={50,75,100,125,150,175}(m)时与移动地面站通信的 Drones cube静态通信能耗.通过对计算,可知在的函数中无H和D的交叉项.图9(b) 为直线分布的Drones cube 与移动地面站通信时的静态通信能量场,能量梯度表明H对影响较大.

图9 直线分布的Drones cube 静态通信能耗与H 和D 的关系Fig.9 The relationship between the energy consumption of drones cube static communication and H and D
基于上述(H,D) 的离散数据,进行二项式拟合,可以得到Drones cube 在直线分布时的拟合静态通信能量为(H,D)=2.622+0.01533D+0.4845H+0.00295D2+0.02268H2.在95% 的置信区间内,拟合方差SSE 为8.519×10-12,确定系数R-square 为1,均方根误差RMSE 为5.42×10-7.根据拟合结果,可知在(H,D) 的函数中无H和D的交叉项,且H及H2项系数较大,因此在H∈[150,200](m),D∈[50,175](m) 范围内,H对影响较大.
图11 展示了Drones cube 直线分布情况下MES 在最佳路径点间移动过程中,对空基监测平台数据中继转发的动态通信能量变化.定义相邻Drones cube 中心连线的垂直平分线与相邻最佳路径点连线的交点位置为软切换点(Soft switch point),相邻最佳路径点的中点位置为硬切换点(Hard switch point).若MES 在软切换点改变中继簇,即停止对第i个Drones cube 中继,开始对第i+1 个Drones cube 中继,称为软切换模式.若MES 在硬切换点改变中继簇,则称为应切换模式.对于图中所示的Drones cube 直线分布情况,软切换点即为相邻Drones cube 中心连线的中点,其中实线为硬切换模式下的动态通信能耗及平均通信能耗,虚线为软切换模式下的动态通信能耗及平均通信能耗.可以看出,软切换模式下的平均通信能耗较低,较为节省能量,且通信功率无突变,降低网内干扰,延长设备寿命.因此,MES 在基于本文方法确定的最佳路径点间移动时,需在软切换模式下运行.对于三角分布和圆形分布的Drones cube,也有相似的结论.

图10 直线分布的Drones cube 静态通信能耗拟合Fig.10 Energy consumption fitting of drones cube static communication under linear distribution

图11 直线分布的Drones cube 动态通信能耗(H=150,D=75)Fig.11 Dynamic communication energy consumption of drones cube under linear distribution(H=150,D=75)
综上,针对按照三维Critical-square-grid 模型编队的Drones cube,首先,在根据应用需求确定部署坐标(x,y) 后,应尽可能减小H以降低通信能耗;其次,若监测高度H确定,应首选圆形分布部署,再选三角分布和直线分布部署,以避免或弱化通信耗能的纵向不均衡现象,并降低通信能耗增长率,提高网络整体生存周期;再次,当上述部署方案确定后,可应用本文提出的方法,减小移动地面站MES在不同簇之间的移动距离,降低移动能耗,进而提高移动地面站的生存周期,特别是当Drones cube 大间距D部署时;最后,MES 在最佳路径点间移动时需采用软切换模式,降低通信能耗,降低网内干扰,延长设备寿命.
4 结论
面向基于旋翼无人机的近地面空间应急物联网应用,本文提出了一种物联网空地节点部署协同优化方法.根据按需部署的旋翼无人机平台在分布区域内大范围、队列化、存在位置漂移的特点,通过协同优化旋翼无人机空基平台和移动地面站的部署,并迭代更新,在提供可靠通信的同时,减少移动地面站的移动能耗,提高了单位时间内移动地面站和旋翼无人机空基平台信息交换的次数,进而提高了中继效率.进而解决近地面空间应急物联网应用中物联网空地节点能量受限条件下的远距离通信问题.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
数据采集与处理(2018年6期)2018-12-19
大陆桥视野·下(2017年5期)2017-06-19
北京航空航天大学学报(2016年8期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
现代防御技术(2016年1期)2016-06-01
郑州大学学报(理学版)(2015年3期)2015-12-27
航天器工程(2015年3期)2015-10-28