多功能管道疏通机器人
2021-09-29 14:45西安思源学院工学院白光榜张建伟李美星
电子世界 2021年14期
西安思源学院工学院 白光榜 赵 祎 罗 强 张建伟 张 锦 李美星
管道工程作为一种重要的经济社会基础性建设设施,它的应用十分广泛。管道在日常使用的过程中,由于受到各种原因的干扰,会导致管道发生各种堵塞,从而引起管道的堵塞甚至导致破坏。若不及时地对管道进行排除、维护以及清理,则有可能会产生更大的隐患。由于管道内的空间和环境的影响,人们不能直接检测和维护,检测和清洗工作的难度很高。所以有效办法就是设计一种可以替代人工的机器,帮助人们高效率的工作。
针对上述问题,本文将介绍一种多功能管道疏通机器人,其采用三个履带轮的作业方式,解决了疏通设备难以适应管道复杂工作环境的难题,实现了高效率、高质量完成管道疏通工作的目的。
1 多功能管道疏通机器人的简介
多功能管道疏通机器人主要是解决中小型管道堵塞和清除污垢以及检测管道封闭性的机器人。结构由三个履带轮和主体部分组成,三个履带轮通过调节可以确保作业时的稳定性,如图1。主体部分有动力输出和探测器,以及清理的装置。在不同的管道工作时,检测装置和清理装置都可以更换,选择好更有利于工作的装置。此机器人的控制可以自动在管道里行走作业,也可以通过遥控来进行操控,如图2所示。
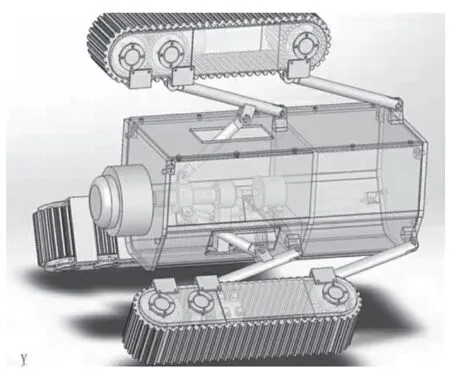
图1 管道疏通机器人整体结构图
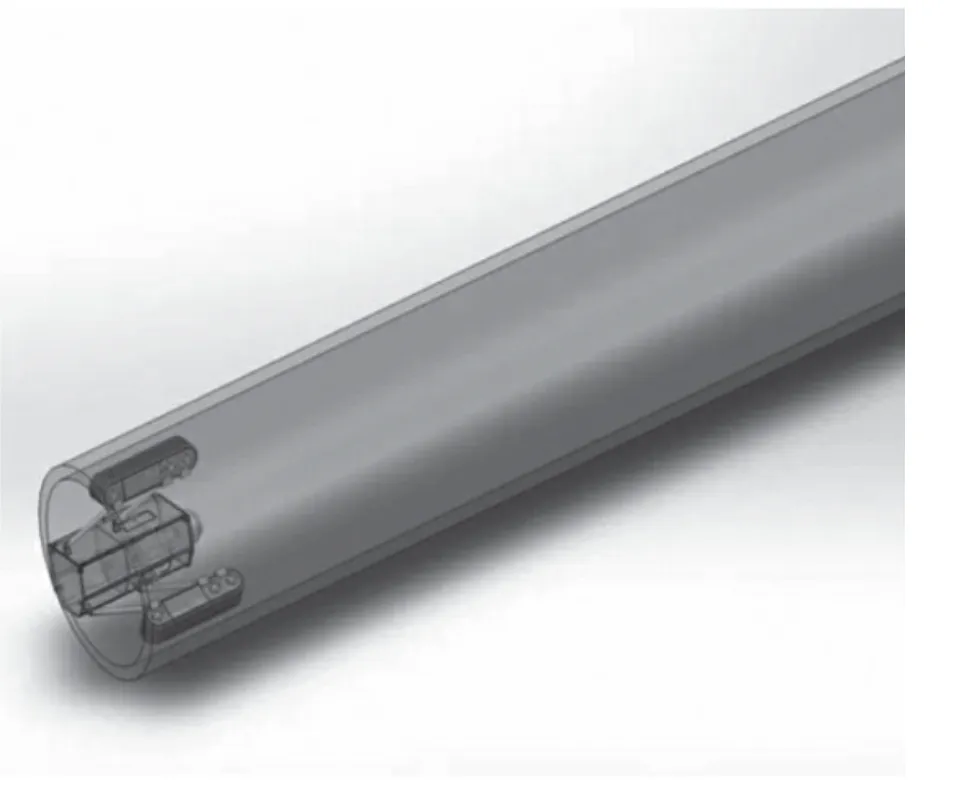
图2 机器人工作状态示意图
2 多功能管道疏通机器人结构原理
(1)机器人的动力输出以及三个履带轮通过气压缸装置的调节,三个履带轮确保在一个同心圆内,可以有效的使其在管道内行走。
(2)机器人主体部分设计成软体结构,使其在两个管道接口处可以形成一定的弯度,依旧可以在管道内正常工作。
(3)采用arduino进行控制,通过超声波传感器、温度传感器、湿度传感器openmv视觉识别摄像头可以确保机器人的检测功能。
2.1 行走装置的选择-履带轮
通过搜集资料和调研分析,发现履带轮行走装置在管内行走远远可能优于其他不同类型的行走机构。首先,履带轮可以大面积的接触在管壁内,这样就完全可以直接使得机器人的履带与管壁之间产生较大的横向摩擦力,防止机器人脱落,可以有效快速的进行作业,为了适应不同的管径范围,在机器人的每个履带轮上都装有气压缸结构,如图3所示。当要求在不同型号管内工作时,可以通过气缸来调整三个履带轮的位置,使得三个履带轮的空间位置在同一圆上,确保每个履带轮贴在管壁内,这样就可以适应不同大小的管道,提高了工作效率。
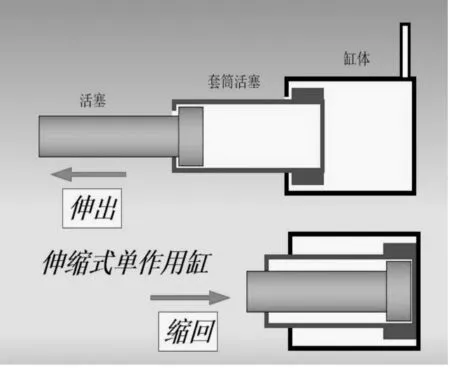
图3 气压缸工作原理
履带式结构的分析:
优点:
(1)履带式机器人接触面积大,适用于松软或者泥泞的工作场地上进行工作,在管道内不易打滑,防止在垂直管道坠落。
(2)履带式机器人可以轻松的越过障碍物。
(3)履带轮有强劲的抓地力,这样可以确保机器人在清理杂物时正常前进。
当然,履带式机器人也存在一些缺点,首先,履带轮相比传统轮子要重,这样使人们携带起来就有一些不便,其次,履带式机器人在转弯时,由于和管壁直接接触摩擦,会对地面有较大的剪切破坏,因此会对管壁造成一定的损坏。
2.2 机器人电机的选择
由于管道疏通机器人受到各种管道阻力约束和受到限定的各种条件下进行作业的,特别是在那些经常具有弯曲的大型管道里需要进行大功率高速运行,首先要具备一个足够的摩擦力以及他们能够同时克服管道重力的相互作用,另一方面还要求需要为他们自身提供一个足够大的推动力同时克服所带来的管道阻力。考虑到在管内工作时的需求,尽量减少机器人的重量和体积,因此本设计采用直流电机进行驱动,采用可充电航模电池提供动力输出,可以有效的减少机器人的自身重量。每个履带轮独立配备一个直流电机,这样就可以输出更强的动力。
2.3 机器人控制系统的设计
由于管道内部的各种复杂环境,机器人必须可以自主完成作业任务,因此采用单片机来控制整个机器人运行,单片机采用arduino,安装各种传感器和探测仪器,设计出各个模块的功能,这样可以确保机器人实时传送管道内的情况。同时机器人在管道内进行检查、清理、修复时可能会使其受到一定损坏,因此,我们要考虑到机器人的自治和自我修复功能,这样机器人即使出现问题,也可以通过自身调节解决,这将在工作中会很大的提高效率。
3 多功能管道疏通机器人的功能
基于以上基本结构技术原理,其功能如下:
(1)当管道堵塞时,将机器人放进管道的入口,调节三个履带轮的位置,使其贴入管道内壁,然后进行工作,可其将管道内部垃圾清洁到管道末端。
(2)当管道破裂时,安装上检测装置,使机器人在管内进行检测排查,确定管道破裂的位置。
(3)多功能管道机器人还可以检测部分管道内的温度、湿度等,检查其封闭性。
(4)可以根据在不同环境的作业需求,可以装配不同的检测装置和清理装置,进行实时影像检测、分析处理,确保在不同环境下都可以进行有效的工作。
结语:随着人们生活水平的不断提高,城市建设也越来越大,许多管道由于管内污物的存在,很容易发生堵塞状况,因此管道疏通工作耗费了大量的人力物力,而且工作效率很低。因此急需一种能够代替人工来完成管道疏通工作的机械设备,提高工作效率,节省人力物力。
目前市场清洁管道的相似产品存在使用的局限性,每种产品只能对应一种型号的管道,多功能管道疏通机器人可以在不同型号的管道里进行作业,同时具有探测和清理的功能,结构的合理设计解决了以往管道里复杂情况对作业时的不利影响。并且可以更换不同的装置,实现多功能的用途。从而可以有效降低使用成本,大大提高了作业效率。
猜你喜欢
中国石油石化(2021年8期)2021-03-30
装备制造技术(2020年4期)2020-12-25
石油化工建设(2019年6期)2020-01-16
西南石油大学学报(自然科学版)(2019年4期)2019-11-04
计算机测量与控制(2017年6期)2017-07-01
石油化工建设(2017年2期)2017-06-05
中国塑料(2016年12期)2016-06-15
中国塑料(2015年12期)2015-10-16
橡胶工业(2015年4期)2015-02-23
西南军医(2015年4期)2015-01-23