
新型电控空气悬架系统集成控制策略研究*
2021-09-30 03:19马英照严天一赵燕乐
汽车工程 2021年9期
马英照,严天一,赵燕乐
(青岛大学机电工程学院,青岛266071)
前言
传统被动悬架系统刚度、阻尼等主要参数不可实时调节,导致车辆平顺性与操纵稳定性较差,同时在高速转弯或紧急避让等工况下易导致车辆侧翻等危险事故。具有电机式主动横向稳定器的新型电控空气悬架系统可有效协调平顺性与操纵稳定性之间的固有矛盾,有效提升整车综合性能。
国内外学者已提出多种控制算法以提高空气悬架性能,如:Moheyeldein等[1]通过搭建具有附加气室的2自由度空气悬架仿真模型,参数化仿真分析了附加气室体积及其内部压力等主要参数对悬架性能的影响规律。Kim等[2-4]分别提出电控空气悬架系统闭环容错控制算法和滑模控制算法,并通过仿真和实车试验,验证了所设计控制算法的有效性。严天一等[5]利用基于模型设计的方法,搭建电控空气悬架系统控制策略,并设计其电子控制单元。江洪等[6-7]构建附加气室容积可调空气弹簧的整车悬架模糊控制算法,并开发出整车半主动空气悬架的TS型神经模糊控制器。虽然电控空气悬架可提高车辆平顺性,但其存在侧倾稳定性较差的技术问题,且传统被动横向稳定杆的扭转刚度为常值,不能够根据行驶工况适时调节电控空气悬架系统的侧倾刚度;而电机式主动横向稳定器具有主动实时调整车辆侧倾刚度且节能效果明显等技术优点。Buma、Suzuki等[8-9]设计了基于三相无刷直流电机与谐波齿轮减速器的电机式主动横向稳定器,与液压式主动横向稳定器相比,可有效降低燃油消耗。Sorniotti[10]设计并试制出一种电机式主动横向稳定器,相关硬件在环试验与实车试验结果表明,可有效改善车辆侧倾稳定性与操纵稳定性。周兵等[11]构建含主动悬架与主动横向稳定杆的整车动力学模型,并综合利用线性与PID控制提出集成控制策略。
针对电控空气悬架与电机式主动横向稳定器集成控制研究尚属鲜见,并且基于传统分布式架构的单独控制方法,管理复杂、数据传输速率及处理效率较低,具有强大算力的并行多核域控制器将集成原来归属于各个独立电子控制单元的大部分功能[12-16]。故本文中综合考虑车辆平顺性与抗侧倾稳定性,提出对电控空气悬架和电机式主动横向稳定器实施集成式域控制,通过搭建电控空气悬架系统整车动力学模型与电机式主动横向稳定器模型,提出新型电控空气悬架系统集成控制策略,开发其并行多核电子控制单元,开展相应的典型工况离线仿真与硬件在环试验以有效评估新型控制策略主要性能。
1 系统模型构建
1.1 电控空气悬架系统整车动力学模型
9自由度电控空气悬架系统整车动力学模型由车身的垂向运动、侧向运动、俯仰运动、侧倾运动、横摆运动及车轮垂向运动等子模型组成[17](图1~图3)。

图1 电控空气悬架系统整车动力学模型

图2 侧向、横摆模型
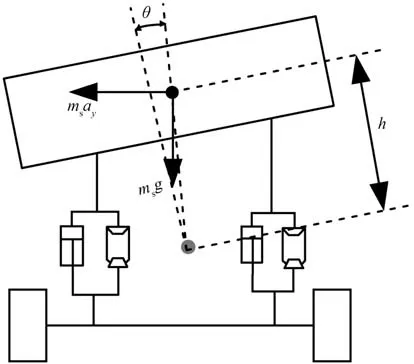
图3 侧倾模型
垂向运动模型:

侧向运动模型:

俯仰运动模型:

侧倾运动模型:

横摆运动模型:

非簧载质量运动模型:

其中:

当车身俯仰角θ和侧倾角φ在较小范围内变化时,车身质心的垂直位移与四车轮处车身的垂直位移存在如下关系:

式中:m为整车质量;ms为簧上质量;mui(i=fl、fr、rl、rr)为簧下质量;θ为车身侧倾角;φ为车身俯仰角;γ为横摆角;δ为前轮转角;Ix、Iy、Iz为车身侧倾、俯仰、横摆转动惯量;a、d为车辆质心至前、后轴的距离;bs为轮距;h为车身侧倾半径;xc为簧上质量质心位移;xsi为各悬架处簧上质量位移;xui为各簧下质量位移;Mf、Mr分别为前、后主动横向稳定器控制转矩;ki为各悬架处弹簧刚度;ci为各悬架处减振器阻尼;Fi为悬架对车身的垂向力;Foi为车轮动载;xoi为路面不平度激励;kti为各轮胎刚度;Fyi为车轮侧向力;vx为质心纵向速度;vy为质心侧向速度;pi为空气弹簧内气体压力;Ai为空气弹簧有效面积。
1.2 空气弹簧模型
假定空气弹簧充放气过程为变容积绝热过程,则空气弹簧充放气变质量模型:

在车身高度调节过程中,将空气弹簧模型视为活塞缸模型,即假定空气弹簧容积变化近似看为固定容积变化率下的弹簧垂直位移变化:

联立式(9)和式(10),推导出完整空气弹簧充放气过程理论模型:

式中:κ为空气绝热系数;R为气体常量系数;T为空气弹簧内部温度;p为空气弹簧内部气体压力;V为空气弹簧内部气体体积;V0为空气弹簧初始容积;ΔV为空气弹簧有效容积随高度的变化率;qm为空气弹簧充放气时气体质量流量。
1.3 轮胎模型
为合理表征轮胎在转向工况下的力学特性,采用“魔术公式”轮胎侧向力学模型计算轮胎侧偏力。在不考虑车轮外倾角条件下,即外倾角γt=0,水平方向偏移Sh=0,垂直方向偏移Sv=0,则该轮胎模型如式(12)所示[18],其拟合系数值见表1。
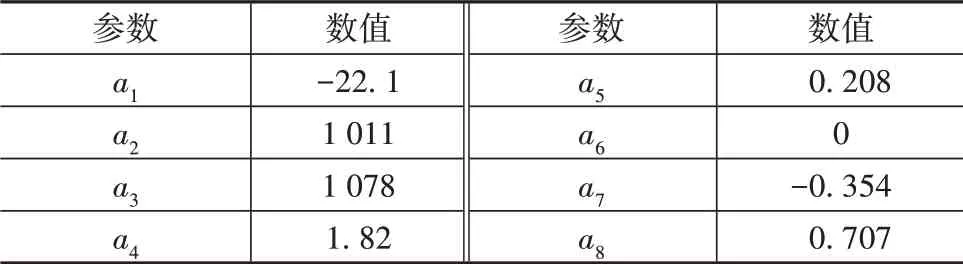
表1 轮胎侧向力学模型拟合系数
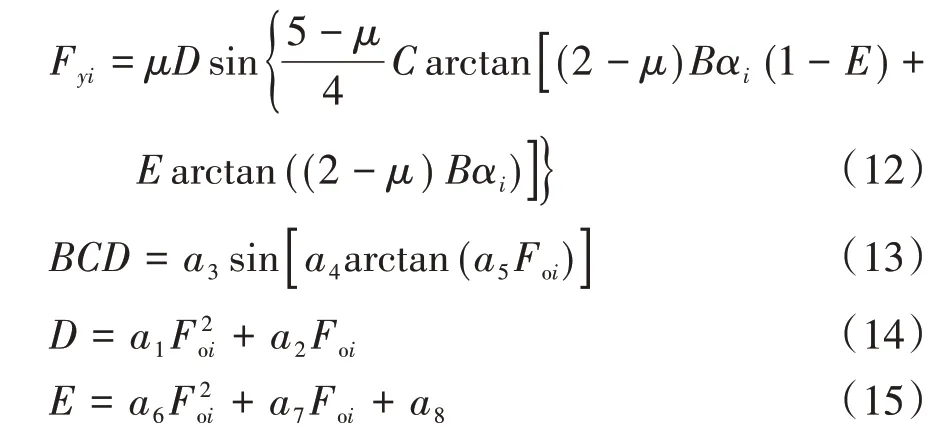
式中:Fyi为车轮侧向力;μ为路面附着系数;αi为轮胎侧偏角;B、C、D、E分别为车轮侧向力一侧偏角曲线峰值因子、形状因子、刚度因子和曲率因子;Foi为车轮动载。
1.4 路面模型
本文采用非平稳时域路面模型[19]:

式中:xoi为轮胎i(i=fl、fr、rl、rr)处路面不平度;x1、x2为系统状态变量;f0为下截止频率,取0.01 Hz;v为车速;n0为标准空间频率,取0.1 m-1;G0为路面不平度系数;ω(t)为高斯白噪声,均值为0;d为轮距;l为轴距。
1.5 电机式主动横向稳定器模型
本文中所述电机式主动横向稳定器采用三相无刷直流电机作为作动器,其内嵌电机通电以后产生的电磁转矩经谐波齿轮减速器减速增扭作用后,传递到左、右横向稳定杆臂,产生作用于车身的垂向力,并形成反侧倾力矩,以抑制整车侧倾运动(图4和图5)。

图4 电机式主动横向稳定器结构示意图

图5 主动横向稳定器受力分析图
内嵌电机输出转矩与反侧倾力矩之间存在如下关系:

式中:Faas为主动横向稳定器作用于整车底盘的垂向力;Ma为主动横向稳定器输出转矩;Maas为主动横向稳定器产生的反侧倾力矩;b为左、右横向稳定杆纵臂长度;c为主动横向稳定器的长度;θe为左、右横向稳定杆臂相对转角;θe∕2为稳定杆臂与水平方向夹角。
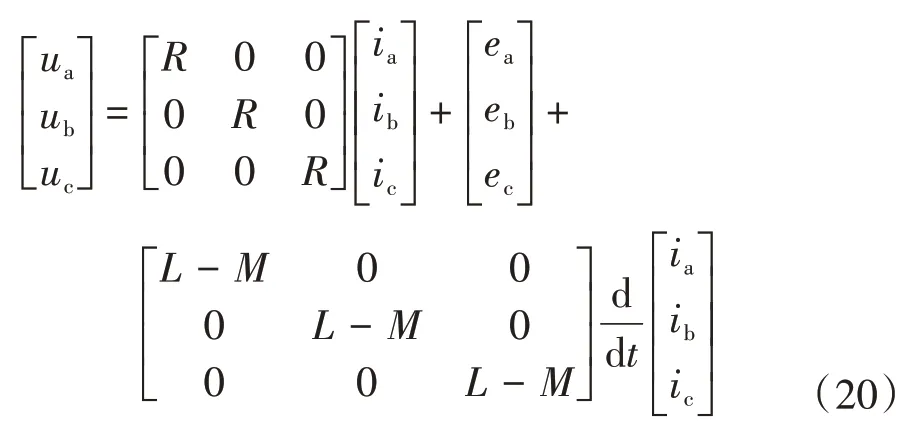
1.6 三相无刷直流电机模型
电机式主动横向稳定器内嵌电机的定子绕组采用星形联接,则绕组相电流之间满足关系式:

三相电压方程:
内嵌电机输出电磁转矩方程:

内嵌电机转子运动方程:

电机式主动横向稳定器输出转矩:

式中:ua、ub、uc为定子绕组各相电压;ia、ib、ic为定子绕组各相电流;L、M为定子绕组的自感和互感系数;R为定子绕组阻值;ea、eb、ec为定子绕组相反电动势;Tl为负载转矩;J为电机转动惯量;B为阻尼系数;ω为电机角速度;i为谐波齿轮减速比。
2 集成控制策略设计
将车身侧倾角作为主要优化指标,通过电控空气悬架系统降低车身质心高度与电机式主动横向稳定器输出的反侧倾力矩,以提高车辆操纵稳定性与抗侧倾性能,新型集成控制策略具体如图6所示。

图6 集成控制策略框图
空气弹簧充放气系统存在时滞,且转向工况下不宜进行悬架高度切换,因此本文采用文献[20]中提出的转向意图辨识算法进行驾驶意图I识别。
2.1 空气悬架系统控制策略设计
本文中利用Matlab∕Stateflow搭建空气悬架控制策略模型,具体控制逻辑如图7所示:电子控制单元通过实时处理车速、路况、车身高度以及储气筒压力等信号,控制悬架高度在高位、标准和低位等3种不同模式之间进行适时切换。图7中各控制逻辑值具体如表2所示。

图7 空气悬架系统控制策略框图

表2 不同模式控制逻辑值
根据转向意图辨识算法,若行驶意图I为右转弯Irt或左转弯Ilt,则判定车辆即将进入转向工况,且储气筒压力pc小于所标定压力阈值p0时,悬架提前切换到低位模式;若前轮转角δ小于所标定转角阈值δ0,则判定此时车辆处于直线工况,悬架高度进入下述3种模式之一:
(1)当车速v>90 km∕h、pc<p0且持续时间超过3 s时,悬架切换到低位模式;
(2)当车辆停止、起动或车速60 km∕h≤v≤90 km∕h、pc<p0且持续时间超过3 s时,悬架切换到标准模式;
(3)当车速v<60 km∕h、pc<p0且持续时间超过3 s时,悬架切换至高位模式。
2.2 主动横向稳定器控制策略设计
当设置车辆目标侧倾角时,既要保证车辆具有较小的侧倾角[11],亦需考虑驾驶员的主观感受,以获得良好路感,则目标侧倾角与车身侧向加速度关系[21]如式(24)所示。
通过三次插值拟合可得到式(25),其拟合曲线如图8所示。
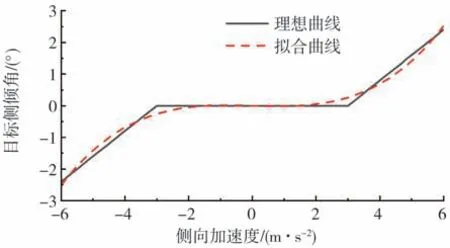
图8 目标侧倾角与侧向加速度关系曲线

传统被动横向稳定杆所提供的反侧倾力矩与车身侧倾角呈线性关系[22],主动横向稳定器输出的反侧倾力矩与车身侧倾角、车辆侧向加速度等信息有关,据此提出主动横向稳定器控制策略(图9)。首先,线性控制器模拟被动横向稳定杆作用,通过整车模型输出的侧倾角得出线性反侧倾力矩,保证主动横向稳定器具有较好的响应速度;然后PID控制器通过实际侧倾角与目标侧倾角值差值计算得到补偿力矩,弥补主动横向稳定器输出中的非线性部分,使得车身侧倾角符合目标侧倾角—侧向加速度关系曲线;最后将二者相互叠加得到车辆所需的反侧倾力矩。

图9 主动横向稳定器控制策略框图
3 仿真分析
为验证集成控制策略的有效性,并分析新型电控空气悬架系统对整车性能影响效果,选取转向盘角阶跃输入及双移线工况作为试验工况,以车身侧倾角作为评价指标,利用Matlab∕Simulink和Stateflow搭建电控空气悬架系统整车动力学模型、电机式主动横向稳定器模型以及新型电控空气悬架系统控制策略模型,并利用典型试验工况进行离线仿真分析,相关整车主要参数见表3。

表3 整车主要参数
转向盘角阶跃输入仿真条件为B级路面,试验车速为80 km∕h,经过0.2 s使前轮转角转动30°后保持稳定,且此过程车速保持不变(图10);双移线输入仿真条件亦为B级路面,试验车速同为80 km∕h,设定车辆行驶路线如图11所示。
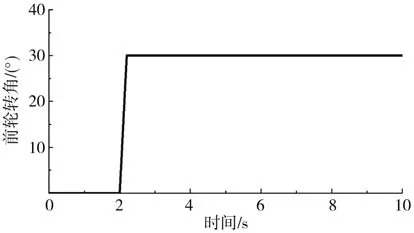
图10 转向盘角阶跃输入工况设计曲线

图11 双移线工况设计曲线
电控空气悬架系统通常具有高位、标准、低位3种不同工作模式,因此分别在不同工作模式下对上述2种工况进行仿真,相关结果如图12所示:在转向盘角阶跃工况下,标准模式车身侧倾角稳态值比高位模式降低约8.9%,低位模式车身侧倾角稳态值比标准模式降低约3.9%;在双移线仿真工况下,标准模式车身侧倾角稳态值比于高位模式最大值降低约9.7%,低位模式车身侧倾角稳态值比于标准模式最大值降低约4.3%,发现通过改变车身高度可降低车身侧倾角,提高抗侧倾阈值,有效改善车辆操纵稳定性和抗侧倾性能。

图12 不同车身高度模式整车侧倾角对比图
采用集成控制策略的新型电控空气悬架系统车身侧倾角变化过程更加平缓。在转向角阶跃工况下,车身侧倾角比无主动横向稳定器控制的车身侧倾角降低约50.7%,在双移线工况下,车身侧倾角降低约69.4%(图13),并且与线性控制或PID控制单独作用于主动横向稳定器相比,集成控制的车身实际侧倾角可快速趋近于目标侧倾角,对其具有更好的跟随性,控制效果更好。

图13 不同控制策略整车侧倾角对比图
4 硬件在环试验
为进一步验证新型电控空气悬架系统集成控制策略,并测试新型电控空气悬架系统并行多核电子控制单主要技术性能,本文基于Simulink∕Desktop Realtime实时仿真环境,利用并行多核电子控制单元与Kvaser Leaf Light V2 CAN总线分析仪等搭建硬件在环试验平台,并通过Embedded Coder代码自动生成工具将电控空气悬架系统与主动横向稳定器系统控制策略模型转化为可执行的C代码,分别布置于微控制器内核0与内核1内,实现并行多核运行模式,以提高程序执行效率。硬件在环试验框架如图14所示。
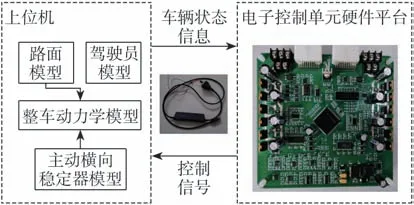
图14 硬件在环试验框架
利用与离线仿真相同工况,开展新型控制策略硬件在环试验,并将其试验结果与离线仿真结果进行比较分析(图15),可知在转向盘角阶跃工况下,硬件在环仿真试验数据的车身侧倾角稳态值与离线仿真数据接近,约为0.94°;在双移线工况下,硬件在环仿真试验与仿真数据变化过程趋于一致,但中后期有小幅波动。上述硬件在环试验结果表明,新型电控空气悬架系统集成控制策略可有效地控制车身侧倾角,改善车辆抗侧倾性能。

图15 硬件在环试验与离线仿真结果对比
5 结论
(1)在转向盘角阶跃工况与双移线工况下,利用Matlab∕Simulink搭建整车动力学集成仿真模型,对空气悬架不同工作模式以及新型电控空气悬架系统不同控制策略进行仿真。相关结果表明,所提出的新型电控空气悬架系统集成控制策略可有效减小车身侧倾角,并对目标侧倾角具有较好的跟随性。
(2)通过搭建的硬件在环试验平台,对比分析硬件在环试验结果与离线仿真结果,进一步验证了新型电控空气悬架系统集成控制策略及其并行多核电子控制单元,并确认其可提高整车抗侧倾性能。
猜你喜欢
时代汽车(2022年14期)2022-07-06
科学大众·小诺贝尔(2021年10期)2021-01-22
发明与创新·中学生(2020年6期)2020-06-22
电脑报(2019年3期)2019-09-10
摄影之友(2019年4期)2019-04-17
中小企业管理与科技·中旬刊(2017年5期)2017-06-06
科技视界(2016年6期)2016-07-12
中小企业管理与科技·中旬刊(2016年1期)2016-03-16
速读·中旬(2015年10期)2015-10-21
