基于不同趋近律的滑模控制相轨迹分析
2021-10-01 03:00钱一帆傅健王良明
计算技术与自动化 2021年3期
钱一帆 傅健 王良明

摘 要:对于采用单向辅助面滑模控制的二阶非线性系统,考虑到不同形式的趋近律和不同的初始状态,对其相轨迹的运行规律进行了研究,给出了切割面的概念和表示形式。根据相位轨迹的分布,分析了不同初始点和三种不同形式的趋近律对相轨迹的影响,同时讨论了相位轨迹通过两个切换面时的运动规律,分析了两条切换面的作用。仿真结果验证了相轨迹的分布规律和切割面的正确性。
关键词:相轨迹分析;单向滑模控制;非线性系统;趋近律
Abstract:For the second-order nonlinear system with unidirectional auxiliary surfaces sliding mode control(UAS-SMC), considering different forms of approaching laws and different initial states, the operation law of phase trajectory is studied, and the concept and representation of partition surface are given. According to the distribution of phase trajectories, the effects of different initial states and three different forms of approaching laws on phase trajectories are analyzed. The motion law of phase trajectory passing through two switching surfaces is discussed, and the functions of two switching surfaces are analyzed. The simulation results verify the distribution of phase trajectories and the correctness of partition surface.
Key words:phase trajectory analysis; UAS-SMC; nonlinear system; approaching law
滑模控制是一种鲁棒非线性控制方法,通过设计系统的滑模动力学来保证系统的动态性能。由于其对参数不确定性不敏感、鲁棒性好、响应速度快、外部干扰小、物理实现简单等优点,滑模控制被广泛应用于各种非线性系统控制中,如近空间飞行器[1][2]、永磁同步电动机[3][4]、磁轴承系统[5],机器人[6]、四旋翼无人机[7]等。传统的滑模控制系统只有一条切换面,当系统状态到达滑模面后, 将渐近收敛到系统的平衡点。
单向辅助面滑模控制系统方法利用两条切换面和四个单向辅助面构成多面体正不变集,以保证系统状态和控制输入在整个过程中满足约束条件。同时,滑模控制器的设计不再受切换面的限制[8]。该方法在一定条件下可以避免开关曲面上的抖振,但会在一定程度上降低收敛速度。近年来,单向滑模控制理论得到了极大的补充。文[9]和[10]分别采用指数趋近律和双幂次趋近律对单向滑模控制器进行加速,极大地加快了收敛速度,在一定程度上解决了单向滑模收敛速度慢的问题;文[11]针对连续非线性系统,采用一种基于幂次趋近律的单向辅助面滑模控制方法,并给出稳定性和有限时间收敛的理论证明。文[12]在单向辅助曲面中引入状态约束,使系统状态在整个运行过程中都能满足约束。文[13]将单向辅助面和非线性干扰观测器进行结合,设计控制器,以显著减少抖振并提高收敛速度。文[14]将单向辅助面和终端滑模技术相结合,提高了控制器在不确定性和外部干扰下的控制性能。如今单向滑模控制方法同样被广泛应用于很多领域,如飞机控制[15],电机控制[16],高超音速控制[17]等。
文[18]采用单向滑模控制方法解决了近空间飞行器在高超音速飞行时气动参数变化剧烈且容易受到外界干扰的特点。文[19]基于幂次趋近律单向滑模控制方法,用于解决无人机机动飞行状态下的非线性控制问题。虽然单向滑模控制系统已经得到应用,但对其认识还不够。由于它有两个切换面和四个单向辅助面,其相轨迹可能比普通的滑动模态复杂,并且这两个切换面的作用是未知的。
对于不同形式趋近律下的单向辅助面滑模控制方法的相轨迹进行研究。对于二阶非线性系统,设计了一种基于不同形式的趋近律的单向辅助面滑模控制器。首先给出了分割面和临界k值的概念。然后,利用分区分析的方法,分析了不同初始点和不同形式趋近律下的相轨迹运行规律。本文主要分析了相轨迹在不同形式趋近律和不同k值时通过两个切换面的运动规律。最后,通过仿真验证了分析结果是正确可靠的。
1 单向滑模控制理论
1.1 系统描述
1.2 單向辅助面滑模控制系统设计步骤
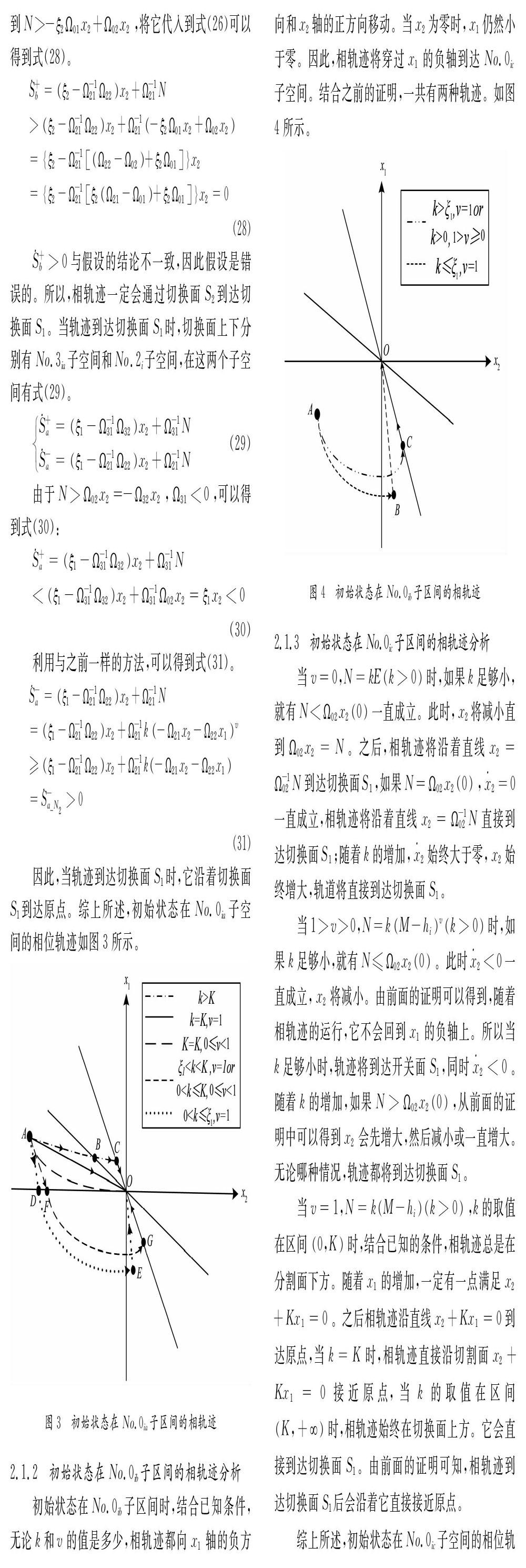
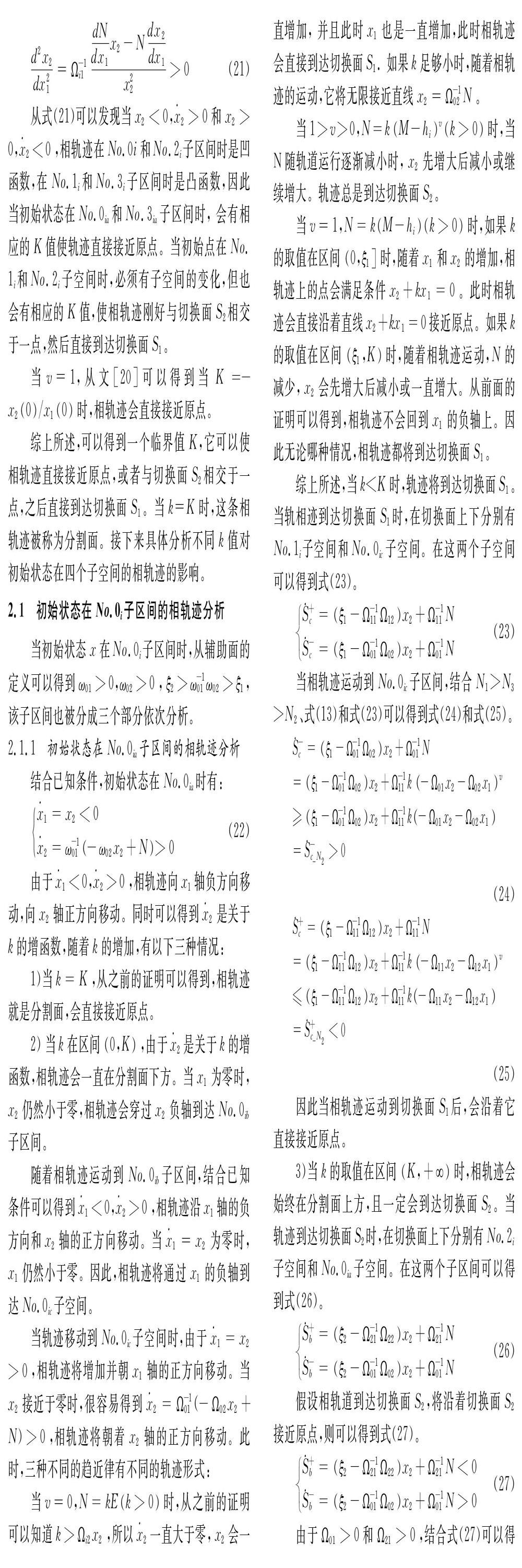
4 结 论
对采用单向滑模控制的闭环系统在不同初始状态和不同形式的逼近律下进行了相轨迹分析。根据理论证明和仿真实验显示,在不同形式的趋近律、不同的初始点和k值时,相轨迹会按照不同的规律运动。根据该定律,在系统初始状态已知的情况下,可以预测系统状态的相轨迹。另外,还发现切换面S1的作用是滑模面,切换面S2的作用是避免相位轨迹发散。同时,当初始状态满足一定条件时,通过对趋近律选择合适的k值,可以避免抖振现象的发生。在下一步的研究中,可以设计其它形式的切换面来代替切换面S2,或者可以优化切换面S1以提高鲁棒性和快速性。
参考文献
[1] 安炳合,王永骥,刘磊,等.基于准连续高阶滑模的可重复使用运载器再入姿态控制[J].计算技术与自动化,2018,37(3):14-20.
[2] CAO T, GONG H J, HAN B. Sliding mode fault tolerant attitude control scheme for spacecraft with actuator faults[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2019, 36(1): 119-127.
[3] 何克胜,王英.基于分数阶滑模观测器的永磁同步电机无传感器矢量控制[J].计算技术与自动化,2018,37(3):25-29.
[4] 黄飞,皮佑国.基于滑模观测器的永磁同步电机无位置传感器控制的研究[J].计算技术与自动化,2009,28(2):32-36.
[5] ZAIDI I ,CHTOUROU M , DJEMEL M . Robust neural control of discrete time uncertain nonlinear systems using sliding mode backpropagation training algorithm[J]. International Journal of Automation and Computing, 2019, 16(2):213-225.
[6] ZHAO J, JIANG B, XIE F, et al. Adaptive sliding mode back-stepping control for near space vehicles considering engine faults[J]. Journal of Systems Engineering and Electronics, 2018, 29(2): 343-351.
[7] ZHANG Z, WANG F, GUO Y, et al. Multivariable sliding mode backstepping controller design for quadrotor UAV based on disturbance observer[J]. Science China (Information Sciences), 2018, 61(11): 155-170.
[8] 傅健,吴庆宪,姜长生,等.连续非线性系统的滑模鲁棒正不变集控制[J].自动化学报,2011,37(11):1395-1401.
[9] 胡田文,吴庆宪,姜长生,等.指数趋近律单向辅助面滑模控制[J].电光与控制,2013,20(7):36-41.
[10]ZHANG P, WU Q X. Double Power reaching law for sliding mode control with unidirectional auxiliary surfaces[C]. 36th Chinese Control Conference, 2017: 496-501.
[11]于媛媛,吴庆宪,姜长生.基于幂次趋近律的单向辅助面滑模控制[J].电光與控制,2014,21(4):29-33.
[12]傅健,吴庆宪,姜长生,等.带状态约束的非线性系统单向辅助面滑模控制[J].控制与决策,2011,26(9):1288-1294.
[13]邵鹏,康传华,翟文华,等.基于快速双幂次单向滑模的飞行器纵向控制[J].电光与控制,2020,27(3):104-109.
[14]任泽玉,吴庆宪,姜长生.基于NDO的单向辅助面滑模飞行控制[J].电光与控制,2013,20(9):48-52.
[15]HEN B, JIANG C S, JIANG B, et al. Terminal sliding mode control with unidirectional auxiliary surfaces for hypersonic vehicles based on adaptive disturbance observer[J]. Mathematical Problems in Engineering, 2015: 0-11.
[16]刘胜,郭晓杰,张兰勇.六相永磁同步电机新型单向滑模控制[J].电机与控制学报,2018,22(10):10-19.
[17]YANG Z H, FU J, WANG L M, et al. Back-stepping sliding mode control based on invariant set and nonlinear disturbance observer for HSV with attitude constraints[C]. 38th Chinese Control Conference, 2019: 1029-1034.
[18]高倩,贺乃宝,姜长生,等 近空间飞行器单向terminal滑模姿态控制抗干扰研究[C].第25届中国过程控制会议论文集,2014:1214-1219.
[19]吕海龙.一种基于单向辅助面滑模控制的无人机姿态控制器设计与仿真[J].四川兵工学报,2015,36(11):112-117.
[20]FU J, WU Q X, CHEN W H, et al. Chattering-free condition for sliding mode control with unidirectional auxiliary surfaces[J]. Transactions of the Institute of Measurement and Control, 2013, 35(5): 593-605.
[21]QIAN Y F, FU J, WANG L M. Phase trajectory analysis of sliding mode control with unidirectional auxiliary surfaces method[J].IJAMCE, 2020, 3(1): 15-24.