基于扰动观测的电力推进系统直流侧电压振荡抑制技术研究*
2021-10-09 08:34马佳睿刘明昊
计算机与数字工程 2021年4期
马佳睿 刘明昊
(1.91404部队 秦皇岛 066000)(2.明阳智慧能源集团公司 中山 528437)
1 引言
在以电力变换装置为基础进行电能变换和处理的船舶综合电力推进系统中,如何保证电力变换装置互联系统的稳定运行是本文的研究核心。在容量有限的船舶独立供电系统中,大量具有负阻抗特性的电力电子变换器的接入会导致推进系统直流侧电压出现不稳定振荡,由此而引发的电能质量问题甚至是故障可能会波及全船。而电力推进系统所占的功率等级使得它的动态特性将会对直流侧电压的稳定性有着决定性的影响。
文献[1]提出了基于直流母线电压前馈的变频器控制策略,相当于在直流侧引入了一个虚拟电容,从而达到在不改变实际电容大小的情况下,维持直流侧电压的稳定。文献[2]提出了一种应用于光伏并网逆变器的电流扰动观测控制方法,可有效抑制电网电压与直流侧电压变化对逆变器电流控制的干扰。本文提出的基于扰动观测(DOB)的电力推进系统变频器控制策略,在频域内可以改善推进系统的负阻抗特性,在时域内能有效抑制由于推进系统负载转矩骤变所引起的直流侧电压振荡。
2 船舶电力推进系统直流侧电压稳定性分析
典型的船舶电力推进系统如图1所示,主要包括三相交流源、整流器、LC滤波电路及变频器、推进电机、螺旋桨等几个部分。图中,Ula,Ulb,Ulc为三相电压源的相电压,Rl,Ll为交流侧等效电阻和电感,Rdc为线路电阻,Ldc、Cdc为LC滤波器的电感和电容,due为直流母线电压。为了便于分析,对发电机及整流、滤波环节进行等效变换,等效后的推进系统如图2所示。

图1 船舶电力推进系统模型

图2 推进系统等效电路图
图2中,Rdcf与Ldcf分别为折算到直流侧的等效电阻和等效电感;Cdc为滤波电容;Eg为等效直流源,由三相交流电源及整流器等效而来;Zin为变频器-推进电机的等效阻抗。其中:

式中,Vrms为发电机三相交流线电压有效值,ωl为三相交流电压角频率。
等效模型直流侧输出阻抗为

要使直流母线-变频器-推进电机系统保持稳定,需满足条件:

式中,PL为负载功率,Pdcmax为直流母线所能带的最大负载功率。由式(3)可知增大直流侧等效电阻Rdcf和直流侧滤波电容Cdc以及提高直流母线电压udc或者减小直流侧等效电感Ldcf均可增加直流母线-变频器-推进电机系统的稳定性,但是增大电阻会增加不必要的损耗,增大电容会增加设备体积以及成本,提高直流母线电压会对设备的绝缘和防护提出更高的要求,而减小电感又会使电流谐波增加,不利于设备的稳定运行。
3 基于扰动观测的直流侧电压波动抑制策略
3.1 扰动观测器的基本原理和应用方案
本文所采用的扰动观测器旨在实时观测出扰动变量idc的变化量,并作为电机定子电流q轴电流指令的修正量,通过调节变频器-推进电机负载功率的变化来抑制直流侧母线电压的波动。扰动观测器如图3所示。
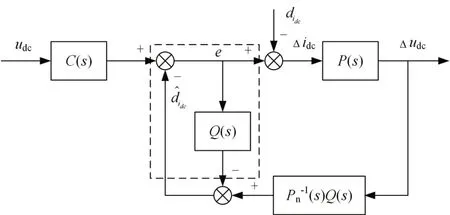
图3 扰动观测器原理图
图3中,P(s)与Pn(s)分别为实际系统与其标称模型;didc为直流测电流idc的扰动量;C(s)为带通滤波器,用于提取直流母线的波动量。为防止虚线框内引入积分误差的累积,Q(s)选为增益略小于1的低通滤波器。
根据扰动观测器原理图,可知:
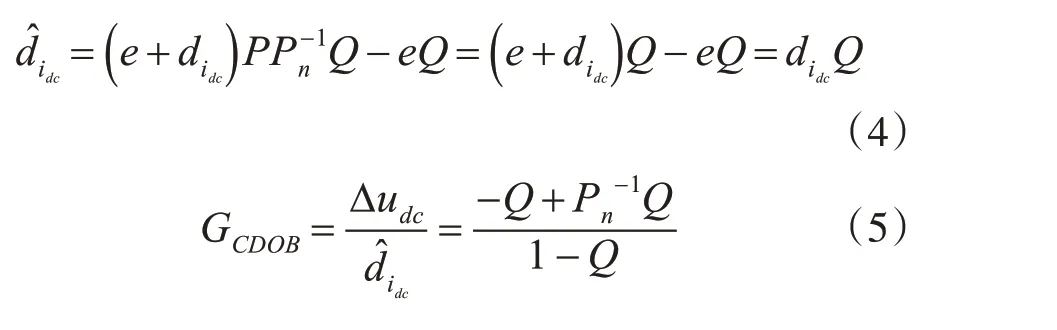
式中:

当控制信号频率为滤波器Q(s)的低频段时,,故扰动观测器可有效观测直流测电流idc的扰动。
3.2 基于扰动观测控制策略的系统性能分析
船舶电力推进系统变频装置控制结构如图4所示,在不改变推进系统硬件设施的条件下,对船舶电力推进变频装置采取恰当的控制策略,在维持直流母线电压稳定的同时使推进系统具有良好的动态特性。
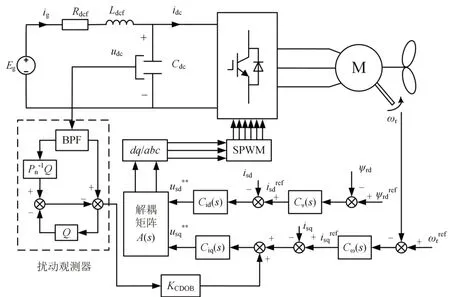
图4 推进系统变频装置控制结构图
分析可知,若由螺旋桨负载突变而引起负载功率增加,直流母线电流idc随之增大,此时要使负载侧功率朝着相反的趋势变化以抵消由功率突变导致的系统不稳定。若能观测到电流扰动di,并将与其变化趋势相反的量作为电机定子电流q轴分量给定值的修正量,即将电机定子电流q轴分量的给定值减小,以减弱负载侧功率增加的趋势,从而达到稳定直流侧电压的目的。反之亦然。
在基于扰动观测的变频器控制策略中,变频器前馈控制器

式中,KCDOB为前馈控制器增益,具体数值可根据控制系统仿真确定,GCDOB为扰动观测器传递函数。
图5是船舶电力推进系统在电机转速为1200r/min,负载转矩为500Nm的条件下,直流侧输出阻抗Zo及变频器-推进电机的输入阻抗Zin的波特图。由图可知,在不加任何额外的变频器控制策略时,变频器-推进电机系统的输入阻抗Zin在低频部分表现出恒功率的负阻抗特性,并在谐振频率处与直流侧输出阻抗Zo存在交互区域,这是引起系统不稳定的主要原因。

图5 推进系统输出及输入阻抗波特图
Zin_HPF与Zin_CDOB分别为采用直流母线电压前馈和扰动观测的变频器控制策略时变频器-推进电机系统的输入阻抗。由图5可知,在加入变频器控制策略后,Zo与Zin的交互区域增大,但是在谐振频率处,Zin的相位裕度有了大幅增加,Zin_CDOB的相位裕度较Zin_HPF提升更为明显,远离-180°,有效改善了变频器-推进电机系统的恒功率特性。
为了判定加入变频器控制策略后的推进系统稳定性是否提升,可引用PBSC(the Passivity-Based Stability Criterion)稳定性判据:
即当母线端口等效阻抗Zbus(s)满足以下无源性条件时,可认为由所有源子系统的输入阻抗和负载子系统的输出阻抗组成的互联系统是稳定的[4]:
1)Zbus(s)没有在复平面右半平面内的极点;
2)Re{Zbus(jω)}≥0,ω。
Zbus(s)为母线端口等效阻抗,可以表示为所有源变换器的输入阻抗和负载变换器的输出阻抗的并联形式。源子系统等效阻抗ZS(s)为前级等效LC滤波电路的输出阻抗Zo(s),负载子系统的等效阻抗ZL(s)为后级变频器-推进电机系统的输入阻抗Zin(s)。
如图6所示,加入基于扰动观测的变频器控制策略后,推进系统母线端总阻抗Zbus的Nyquist曲线越过虚轴从复平面的左半平面进入右半平面,图6(b)为图6(a)虚线框中部分的放大图。可以证明文章中所提出的基于扰动观的变频器控制策略可以有效增强系统的无源性,从而增强系统的稳定性。
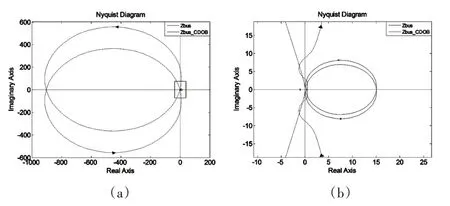
图6 推进系统母线端总阻抗Zbus奈奎斯特图
4 仿真结果与分析
根据电机控制参数,运用Matlab/Simulink软件,搭建船舶电力推进系统仿真模型,验证本文所提出的变频器控制策略的有效性。为了缩短仿真时间,提高仿真效率,对螺旋桨负载进行合理简化,只需表现出螺旋桨负载区别于其他负载的特性。
本文所述推进电机采用功率为120kW的三相鼠笼型异步感应电机,逆变器开关频率为5KHz,电机具体参数如表1所示。
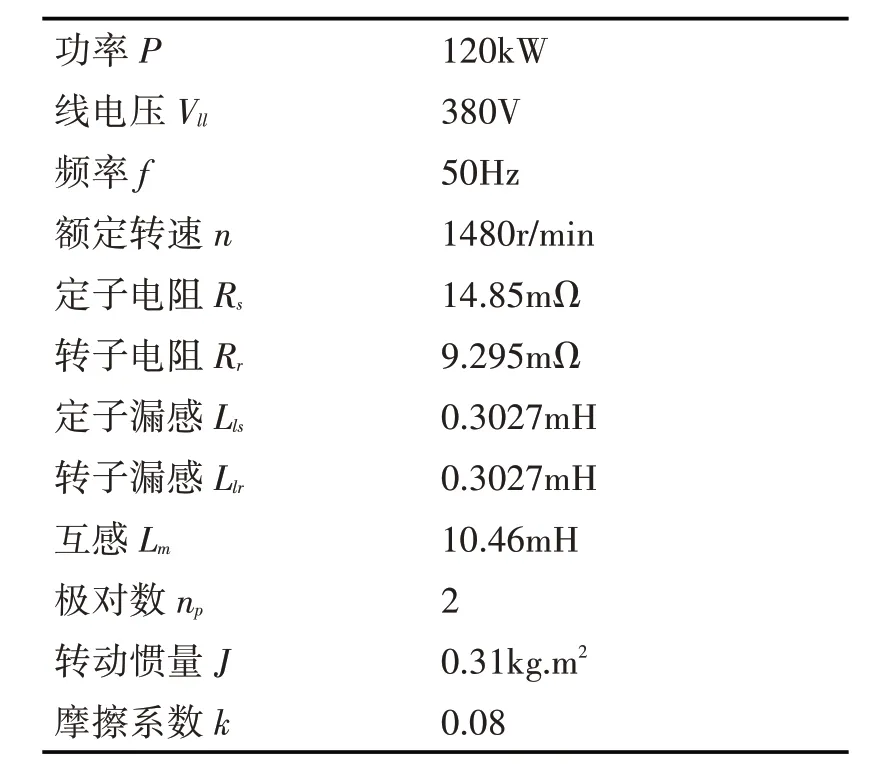
表1 推进电机仿真参数
船舶在海上航行时,受风浪影响,产生纵摇及垂荡运动,螺旋桨轴沉深会随波浪的起伏而产生变化。螺旋桨在出水、入水瞬间,由于螺旋桨沉深变化而导致负载转矩急剧变化。由图7、图8可知,在0.8s时受波浪影响,螺旋桨沉深由小增大,从而导致负载转矩由100Nm突变至500Nm,引起直流母线电压振荡,电机转速会随之减小,产生波动。此时若只靠电机本身的矢量控制,无法使母线电压恢复稳定。在1.6s时,螺旋桨沉深由大变小,负载转矩由500Nm减小至100Nm,直流母线电压恢复稳定,电机转速也随之恢复。
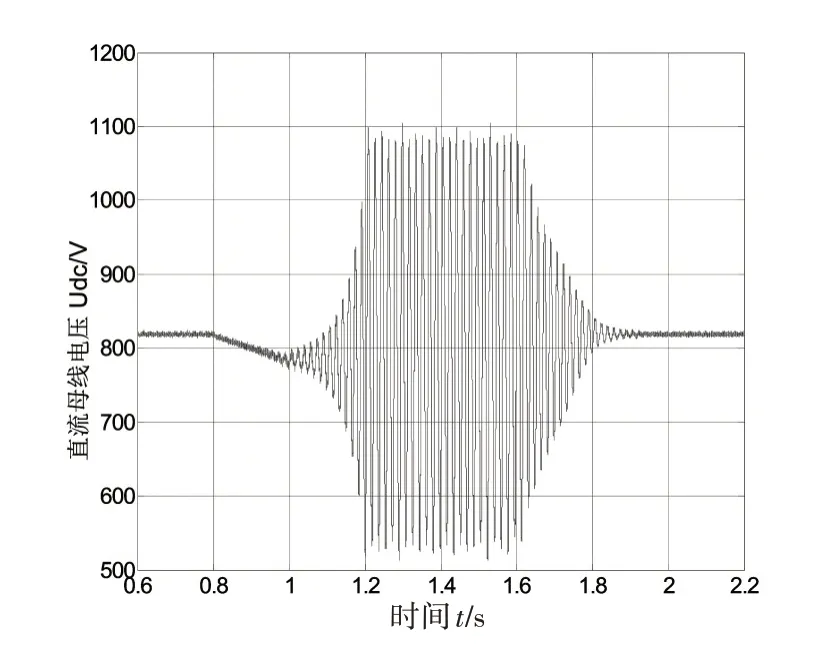
图7 直流母线电压波形图

图8 电机转速波形图
图9、图10是在同种工况下采用基于扰动观测的变频器控制策略时,推进系统各参数变化的波形图。

图9 直流母线电压波形图

图10 电机转速波形图
由图可知,采用基于扰动观测的变频器控制策略,在0.8s时负载转矩由100Nm突加至500Nm时,直流母线电压瞬间减小至770V,电机转速有小幅减小,在加载的时间段内一直稳定在1198r/min。在1.6s时,负载转矩由500Nm减小至100Nm,电磁转矩随之减小,直流母线电压逐渐增加至820V,电机转速随之恢复。
由以上分析结果可知,基于扰动观测的变频器控制策略对直流侧电压振荡的抑制效果十分显著。
5 结语
本文分析了引起电力系统互联装置不稳定的原因,以及通常采用的提高电力推进系统稳定性所采用的直流母线电压前馈控制策略。提出了一种基于扰动观测的电力推进系统变频器的控制策略,并应用船舶电力推进系统的阻抗模型在频域内验证了本章提出的控制策略的有效性,同时根据建立的电机控制模型在时域内对控制策略进行仿真验证,证明基于扰动观测的控制策略对直流侧电压的振荡具有显著的抑制效果。
猜你喜欢
消费电子(2022年6期)2022-08-25
舰船科学技术(2022年11期)2022-07-15
上海师范大学学报·自然科学版(2022年3期)2022-07-11
农业工程学报(2022年6期)2022-06-27
汽车实用技术(2022年5期)2022-04-02
科学与信息化(2020年14期)2020-09-16
孩子·小学版(2020年6期)2020-02-24
电机与控制学报(2018年9期)2018-05-14
山东工业技术(2017年16期)2017-09-05
城市建设理论研究(2014年37期)2014-12-25