
打结装置中α环成形机构的仿生设计与分析*
2021-10-11 06:17陈延伟史远鹏刘万熙
机械工程与自动化 2021年5期
陈延伟,史远鹏,张 浩,刘万熙,孔 帅,马 瀚
(长春工业大学 机电工程学院,吉林 长春 130012)
0 引言
随着机械自动化程度的提高,出现了很多关于捆扎打结的装置,其中绝大多数捆扎打结装置应用于农业生产中,且以D形打结器为主,由于秸秆等农作物在完成捆扎后会发生较大的回弹动作,使捆扎变得更紧凑,而应用D型打结器捆扎工业设备中错综复杂的线束则紧凑度与牢固性较低。为解决这一问题,国内研究人员设计了多种类型的捆扎打结装置。张明等[1]研究了一种线束自动捆扎设备,该设备通过胶带来实现线束的捆扎;王佰超等[2]发明了线束绑扎机,通过对整捆钱币进行绕线及打结以实现存储的自动化。
然而,现有的捆扎打结装备都不适用于电路板间操作空间较小的情况,为此,研究了一种电路板间线束捆扎打结装置,其结构尺寸较小、抓取与成环过程平稳,有较强的适用能力。在该线束捆扎打结装置整个捆扎打结过程中,α环是形成绳结的必要步骤,α环成形机构是整个捆扎打结装置的关键部分,为了使柔性尼龙线绳在单一机构的条件下自动形成α环,本文基于仿生原理设计了一种打结装置中的α环成形机构。
1 α环成形机构的设计
本文设计的α环成形机构执行操作的线绳为柔性尼龙线绳,长度为110 mm、直径为1 mm,形成α环的半径为10 mm。尼龙线绳的密度较小,具有强度高、回弹性能好、抗疲劳性强、热稳定性好、耐磨等优点[3]。要求达到的尼龙线绳捆扎打结效果如图1所示。

图1 尼龙线绳的捆扎打结效果 图2 人手将尼龙线绳形成α环的过程
人手将尼龙线绳形成α环的过程如图2所示。本文模仿人手形成α环的过程设计了α环成形机构,并应用SolidWorks软件建立了α环成形机构的三维模型,如图3所示。
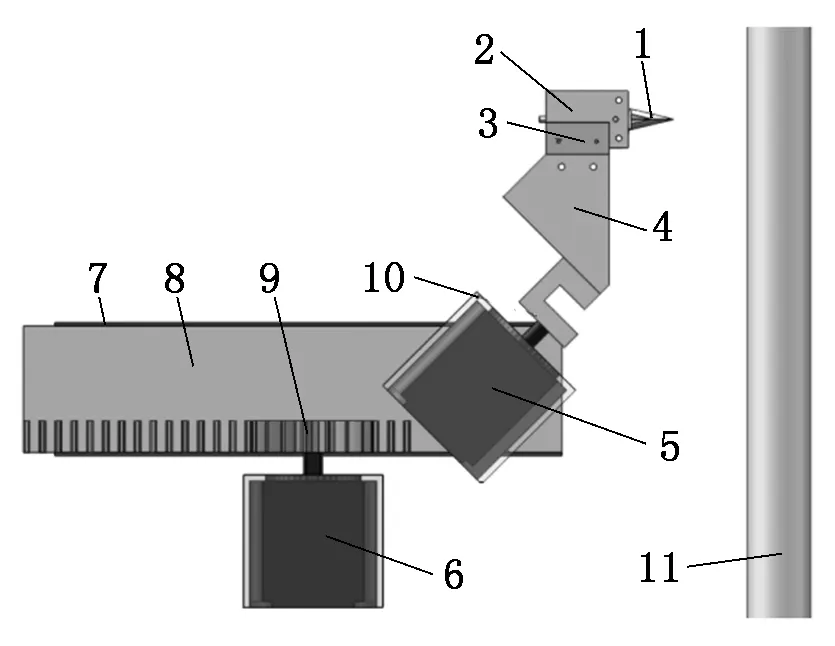
1-夹取机械手;2-机械手壳;3-连接板;4-转向板;5-步进电机一;6-步进电机二;7-轨道底座;8-齿条底座;9-小齿轮;10-电机底座;11-线束
考虑到捆扎打结装置各机构的整体布局,将α环成形机构的轨道底座与线绳垂直。为了使夹取机械手抓取线绳时与形成α环时的角度满足90°,通过模拟人手腕的转动过程,将步进电机一与齿条底座呈45°安装,步进电机一的输出轴与转向板连接,且转向板与夹取机械手的连接处与线绳呈现垂直状态,夹取机械手即可在步进电机一的作用下转动转向板,使其从与线束垂直的状态转换成与线束平行的状态,即通过空间180°的转动实现夹取机械手平面90°转换。为了实现尼龙线绳的抓取以及保留尼龙线绳余量,模拟人手臂向前抓取与向后拉伸的动作,通过步进电机二驱动齿条底座从而驱动机构整体前进与后退。α环成形机构的运行流程如图4所示。
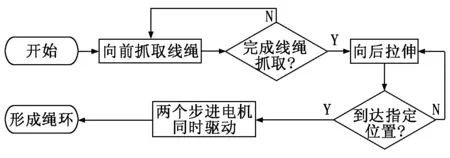
图4 α环成形机构的运行流程
2 尼龙线绳成环过程轨迹分析
考虑到尼龙线绳本身的柔软性以及在成环过程中的复杂形态,为验证α环成形机构能否实现成环功能,对尼龙线绳成环过程的运动轨迹进行分析。
2.1 尼龙线绳方程的建立
假设尼龙线绳在理想状态下只承受拉力与自身的重力,且作用在尼龙线绳上的载荷沿尼龙线绳均匀分布。因此,通过建立尼龙线绳的数学模型来分析尼龙线绳成环过程的轨迹。
在完成绕环状态时,夹取机械手与尼龙线绳的固定端处于同一平面内,在夹取机械手提供转动余量过程中,尼龙线绳在重力的作用下自然下垂,取最低点O为原点,以此来建立尼龙线绳的直角坐标系,如图5所示。

图5 尼龙线绳受力分析坐标系
任意取尼龙线绳AB段内的一点C(x,y),此时OC段由三个力保持平衡,分别为C点所受的拉力Tx、O点所受的拉力T0及OC段尼龙线绳自身的重力G。设Tx与x轴的夹角为α,根据受力平衡条件可得:
(1)
其中:σ0为尼龙线绳O点的应力;g、S分别为尼龙线绳的自重比载和截面面积;Lx为OC段尼龙线绳的长度。
由式(1)可求得尼龙线绳OC段任意一点的斜率,且根据微分定义可得:
(2)
对式(2)求导得:
(3)
由式(3)变换得:
(4)
对式(4)两边积分得:
(5)
变为指数形式后可得:
(6)
对式(6)再进行积分即可求得尼龙线绳悬挂方程为:
(7)
其中:c为积分参数,c=4.5。
2.2 尼龙线绳成环过程的轨迹分析
在完成尼龙线绳悬挂数学模型的建立后,为了更好地观察尼龙线绳在成环过程中的轨迹,取α环成形机构的俯视面为XOY面,选取拉伸状态时夹取机械手的上边线为Y轴,过夹取机械手拉伸尼龙线绳最远点的垂线为X轴。
设抓取尼龙线绳的点为D(10,110),分析α环成形机构在运动过程中尼龙线绳的状态,并将成环过程中尼龙线绳在空间各阶段的状态投影到XOY面内进行分析。尼龙线绳成环过程中α环成形机构的状态如图6所示,各关键点示意图如图7所示。夹取机械手拉伸尼龙线绳到点E(10,0),成环结束时尼龙线绳端点为F(20,100),形成的α环端点为G(-20,35)。

图6 成环过程中α环成形机构的状态

图7 尼龙线绳成环过程各关键点示意图
实际情况中FG段与DE段应是轻微的弧线段,为了便于用数学模型表达,将FG与DE段视为直线进行求解。尼龙线绳的自重比载g=0.009 7 N/(m·mm-2),应力σ0=0.15 MPa。由 式(7)可得出尼龙线绳DE段、EG段和FG段的方程为:

(8)
将式(8)用MATLAB软件的plot函数绘制为二维图[4],得到尼龙线绳各阶段在XOY面的轨迹,如图8所示。
图8中,DE段是拉伸尼龙线绳和预留α环提前量的阶段,当开始绕环时,尼龙线绳处于绷直状态,需要抓手再次向前进给,形成绕环需要的提前量。因此,当尼龙线绳开始绕环时的起始点并不是E点,而是再次向前进给的E′点,所以尼龙线绳在成环状态下的轨迹如图9所示。

图8 尼龙线绳各阶段在XOY面的轨迹
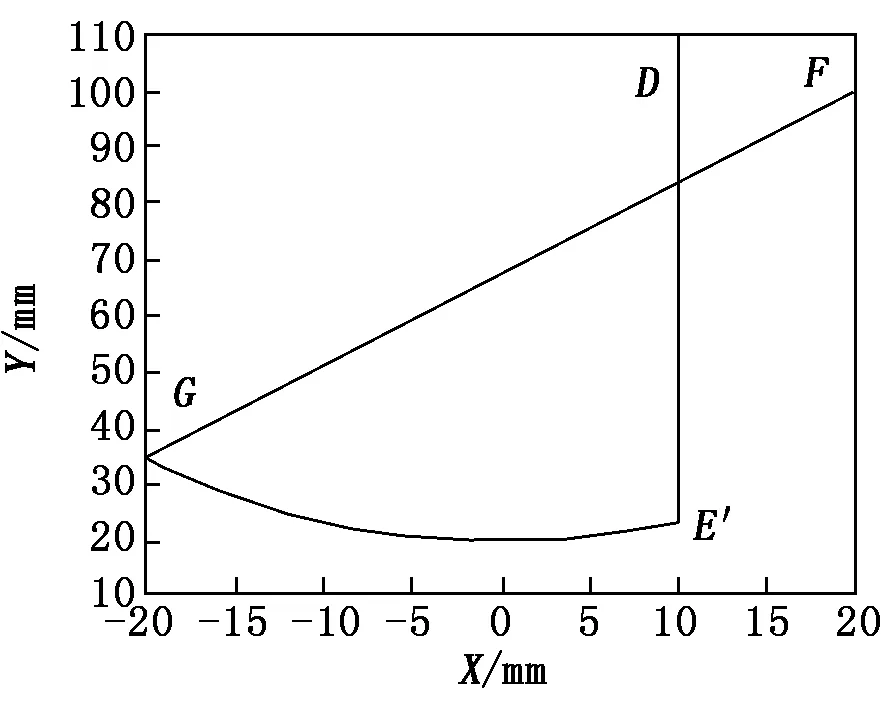
图9 尼龙线绳成环状态在XOY面的轨迹
3 α环成形机构的运动学仿真分析
为了进一步验证α环成形机构的合理性和成环过程中的平稳性以及是否存在干涉等问题[5,6],利用ADAMS进行仿真分析。
为了减少仿真计算量,在确保仿真过程准确的基础上对模型进行简化处理。α环成形机构执行成环动作时,由于第一阶段的抓取与拉伸是直线运动,故选取第二阶段转动绕环过程的仿真分析进行描述;步进电机二通过小齿轮驱动齿条底座做直线运动,步进电机一通过驱动转向板实现夹取机械手空间180°及平面内90°转动的动作。仿真分析时,对小齿轮与转向板施加驱动力矩25 N·mm,在夹取机械手上施加模拟载荷2.5 N代替尼龙线绳,以便于观察运动轨迹。α环成形机构成环过程如图10所示。
由图10(a)、图10(b)可以看出,夹取机械手与齿条底座运动方向平行且两个步进电机间距离最近,此时,夹取机械手处于拉伸尼龙线绳的状态。
由图10(c)可以看出,步进电机一和步进电机二同时驱动转向板与小齿轮,夹取机械手完成空间180°及平面内90°的转动,机构运动过程平稳。
由图10(d)可以看出,夹取机械手运动至设定的最远位置处,位置传感器控制两个步进电机停止运转,此时,尼龙线绳已经实现转动形成α环,两个步进电机自锁,夹取机械手与齿条底座运动方向垂直。

图10 α环成形机构成环过程
当尼龙绳环通过钩环机构形成绳结并切断后,位置传感器控制两个步进电机反转,实现夹取机械手的反向运动,最终夹取机械手与齿条底座回到初始状态,为下一次形成α环做准备。
通过对图10(c)和图10(d)中夹取机械手端点的轨迹进行分析,并将图10(d)中的轨迹投影到XOY面,发现其轨迹与图9尼龙线绳的轨迹曲线相同,从而验证了α环成形机构的合理性与成环方法的正确性。
4 结语
本文设计的模仿人手转动的α环成形机构可实现尼龙线绳独立形成α环,并且结构简单、体积小巧,可在操作空间较小的情况下应用。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
汽车电器(2022年5期)2022-05-23
一重技术(2021年5期)2022-01-18
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
装备制造技术(2018年10期)2018-12-24
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
汽车实用技术(2015年8期)2015-12-26
