
多目标分类智能垃圾箱电控设计研究
2021-10-13 10:24程军曹鑫楠王中昊胡嘉格袁丹
电子制作 2021年19期
程军,曹鑫楠,王中昊,胡嘉格,袁丹
(重庆交通大学,重庆,400074)
0 引言
随着提倡环保的呼声日益提高,社会对垃圾分类越来越重视,不少城市实行了垃圾强制分类措施。但随之而来的是居民对垃圾种类的认识不够清楚的问题。近年来,智能垃圾箱的使用受到广泛关注,它可以在一定程度上代替人工,提高垃圾分类准确率。本装置所具有的示教功能可以帮助提高居民垃圾分类意识,从源头上解决现实生活中垃圾分类准确率低的问题。城市生活垃圾分类收集已经是大势所趋、不能回避。为此设计了一种具有多目标分类和示教功能的智能垃圾箱。
1 系统硬件设计
本装置是通过Linux嵌入式系统为核心的多目标分类智能垃圾箱。首先垃圾箱的图像模块通过调用OpenCV算法寻找图像中目标垃圾的数量和位置,分别传入模板识别和InceptionResNet V2神经网络识别,最终可得出目标物所在的位置和种类。其次,通过语音模块、显示模块播报目标物体所属垃圾种类和显示中英文名称,然后通过控制模块驱动各部分机械结构将目标垃圾投入对应容纳桶中,最后通过超声波测距传感器对桶内剩余容量进行监测。电源模块分为包括电池降压模块和锂聚合物电池。电池提供整个装置所需电源,电池降压模块准确地输送各个模块所需电流,保证各个模块供电正常,实现稳定操作。
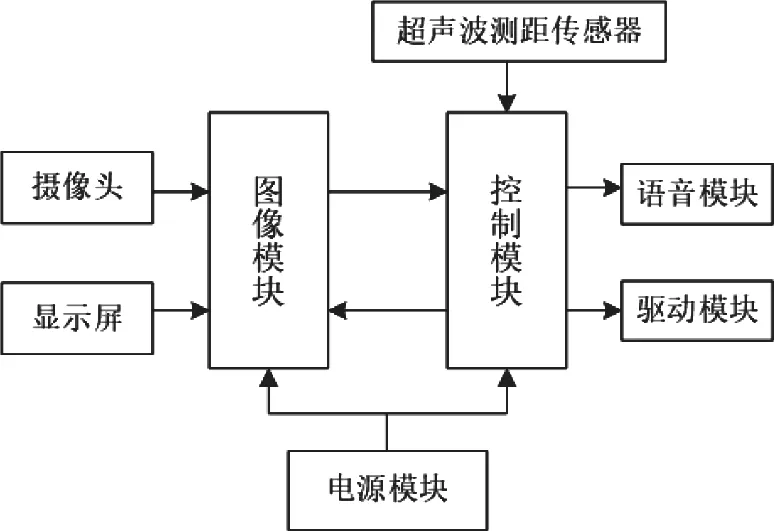
图1 系统硬件原理框图
2 系统主要模块设计
2.1 图像模块

图2 图像模块主控芯片电路原理图

图3 控制模块电路原理图
图像模块采用NVIDIA Jetson Nano作为主控芯片,其内部搭载四核ARM CORTEX-A57处理器、128核MAXWELL GPU和4GB LPDDR内存,能够为装置带来足够的AI算力,足以满足本装置图像处理的性能需求。同时选用的Jetson开发板具有四个USB3.0和一个USB2.0 Micro-B接口,具有丰富的外设接口,因此带来了较高的可拓展性。
摄像头采用SCCB总线和主控芯片进行通信。主控芯片通过串口与控制模块连接和通信。

图4 满载检测模块电路原理图
2.2 控制模块
控制模块主要由STM32实时控制系统组成,采用基于ARM Cortex-M内核的STM32F103C8T6微控制器。该STM32微控制器使用MircoUSB接口供电和连入相应的电路,方便USB设备的开发。
图像模块经过综合处理后将控制命令发回STM32实时控制系统,控制系统通过控制驱动模块以此实现对目标垃圾的分类。
2.3 满载检测模块
本装置对应现行城市垃圾分类制度,设置有四种包括干垃圾、湿垃圾、有害垃圾和可回收垃圾的容纳桶。上述容纳桶顶部均设有超声波测距传感器,选用HC-SR04超声波模块,其采用IO触发测距,具有性能稳定,测度距离精确的优点。
所述超声波测距传感器可对上述容纳桶进行满容量检测,若达到满容量的75%,则通过与英伟达Jetson开发板电气连接的蜂鸣器和LCD显示屏发出声光警。
2.4 显示模块
显示模块包括USB电容触摸屏和LCD显示屏,用户可通过电容触摸屏实现对智能垃圾箱模式和功能的选择,通过显示屏查看摄像头画面、垃圾分类结果、电池剩余电量、容纳桶的剩余容量等。LCD屏幕采用常规LCD总线和Jetson开发板进行通信,Jetson开发板将实时处理后的图像展示在LCD屏幕上,并将信息反馈给用户。

图5 显示模块电路原理图
3 系统软件设计
系统开启后,首先对程序进行初始化。将单个或多个目标垃圾从投放口投入,垃圾停留在输送带机构上,位于识别区顶部的摄像头对垃圾进行拍摄,获得多张垃圾图像,英伟达Jetson开发板接受垃圾图像并进行特征学习,并将其运算结果发送到STM32实时控制系统。通过语音模块播报目标垃圾种类,通过显示模块显示目标垃圾的中英文翻译,并可通过点击显示屏进行英文跟读,当智能垃圾箱处于等待垃圾投放状态时将循环播放垃圾分类宣传片,实现了本装置的示教作用。
本装置的图像识别方法具体实施时,首先使用掩膜遮挡非传送带区域,然后对掩膜处理后的图像进行阈值处理,消除大部分环境光干扰,再进行侵蚀操作,去除无关斑点干扰,最后使用Findcontours操作寻找图像中有效垃圾轮廓,裁剪传入神经网络。
在图像模块完成对目标垃圾的识别后,驱动模块开始工作,通过控制相应的机构将目标垃圾投入对应容纳箱。接下来根据图6和图7详细介绍本装置的分类流程。

图6 系统软件原理框图

图7 智能垃圾箱模型示意图
(1)若图像模块检测到目标物为多种垃圾,则STM32实时控制系统通过控制齿轮齿条模块将输送带前方区域阻隔,随后电机正转控制输送带设备将多个垃圾输送至分隔挡板区域;此时摄像头再次启动采集多张垃圾图像,检查目标垃圾是否已经分开。
①若已分开则舵机控制其中一侧齿轮齿条移开,使目标垃圾落入传动区的托盘位置,通过同步带机构和舵机云台机构将垃圾正确投放至容纳桶中;待一侧的目标垃圾分类完毕后,再打开另一侧的齿轮齿条机构完成对剩余垃圾的分类。
②若未分开则电机驱动输送带反转,将垃圾在后置弧形挡板聚拢后再次分类,重复以上操作直至将所有目标垃圾均投放至所述容纳桶中。
(2)若图像模块检测到目标物为一种垃圾,则不运行齿轮齿条模块,直接通过输送带机构将目标垃圾输送到前方的托盘上,接着通过同步带机构实现在托盘及目标物的前后运动,再通过舵机云台机构实现翻转运动,从而将目标垃圾正确投放到相应容纳桶中。
最后满载检测模块实时对容纳桶的使用容量进行监测,若使用容量已经达到75%,则通过语音模块和显示模块发出声光警报。本装置在应用到城市垃圾管理系统时,当容纳桶内剩余容量不足时,可发信息给区域垃圾管理员,便于及时地对智能垃圾箱已分类的垃圾进行收集处理和进行对智能垃圾箱的清洁工作。
4 结语
本装置是基于Linux嵌入式控制系统的多目标分类智能垃圾箱,很好地实现了对多个目标垃圾的识别并分类,解决了目前多数智能垃圾箱不能进行多目标分类的难点。通过语音模块和显示模块实现了垃圾分类宣传片循环播放、语音播报垃圾种类、英文跟读,具有显著的示教作用,能够提高居民垃圾分类意识,同时为今后建立区域化垃圾管理系统[5]提供了一种可行的思路和可靠的保障。这种分类效率高,生产成本低的多目标智能分类垃圾箱满足当前城市迫切需要对生活垃圾进行合理化回收,进行资源再利用的刚性需求,具有广阔的市场前景。
猜你喜欢
机械工业标准化与质量(2022年8期)2022-10-09
意林·少年版(2021年17期)2021-09-29
舰船电子工程(2020年5期)2020-07-09
作文大王·低年级(2019年6期)2019-08-01
职业·中旬(2017年8期)2017-09-13
领导文萃(2016年23期)2016-12-16
物联网技术(2015年11期)2015-11-26
今日中学生(初二版)(2013年11期)2014-01-23
环球时报(2009-11-25)2009-11-25
现代电子技术(2009年8期)2009-06-25
