
分数阶次对分数阶斜裂纹转子系统的非线性动力学特性影响研究
2021-10-15 01:33陈玉成李志农谷士鹏马亚平
兵器装备工程学报 2021年9期
陈玉成,李志农,谷士鹏,马亚平
(1.南昌航空大学 无损检测技术教育部重点实验室, 南昌 330063; 2.中国飞行试验研究院, 西安 710089)
1 引言
转子在自身的服役期间,由于材料本身或工艺原因,在承受交变机械应力及热场的作用下,非常容易形成疲劳裂纹。转子在运行过程中,因扭转振动会导致斜裂纹。斜裂纹故障在转子的各项故障中占有较大比例,且其潜在危害远大于其他一般性故障,是转子系统正常运行的巨大隐患。目前,斜裂纹转子系统的动力学特性研究虽然取得了一定的进展[1-6]。焦卫东等[1]对不同类型斜裂纹的转子进行研究,揭示了在不同方向上的耦合机理及由此引发的振动特征;Sandeep[2]建立了主动磁轴承支承的含有裂纹故障的柔性转子系统模型,分析其动力学特性;Xuelian Chen[3]用斜裂纹模型模拟轴裂纹引起的时变刚度,研究了偏心相位差对转子系统动力学特性的影响;王峥[4]考虑裂纹故障引起的刚度变化,讨论了裂纹转子系统动力学特性;张祥敏等[5]分析了含斜线裂纹的非线性转子系统随裂纹角度和深度变化时的系统状态变化。然而,现有的研究主要是建立在整数阶的基础上,并未考虑到斜裂纹转子系统具有的分数阶特性。因为分数阶微积分具有记忆特性,所以描述具有记忆特征的阻尼材料时能更好地揭示对象的本质特性。基于此,众多专家开始采用分数阶微积分来研究斜裂纹转子系统的动力学特性[7-12]。张顺[7]研究含有裂纹与碰摩多种复合故障的分数阶转子系统,讨论了系统偏心量与转速对动力学特性的影响,并与整数阶进行对比;李志农[8]、王海峰[9]等建立了直斜2种裂纹的动力学方程,研究了基于分数阶的裂纹转子系统非线性动力学特性薛士明[10]建立了带有分数阶阻尼的转子系统动力学模型,研究了转速和裂纹深度对裂纹转子动态特性的影响;曹军义等[11]建立了含有碰摩故障的分数阶转子模型,研究了该系统的非线性动态特性;王彦霖等[12]采用转子动力学有限元方法建立含内部裂纹转子系统的动力学方程,分析了裂纹的深度、裂纹的位置对转子系统的影响。
这些研究主要考虑的是转子系统中裂纹参数及转速对系统非线性动力学特性的影响,并没有讨论分数阶次的影响。基于此,本文中在建立了分数阶斜裂纹转子系统动力学模型的基础上,通过数值仿真分析不同分数阶次的斜裂纹转子系统非线性动力学特性,为有效诊断斜裂纹转子系统提供理论依据。
2 分数阶斜裂纹转子系统模型建立
本文建立的Jeffcott转子模型如图1所示,其中,R为转轴半径,Ω为转轴的转速,Ωt+α为在有扭振时转盘转角,t为时间。

图1 斜裂纹转子模型示意图及截面z向投影图Fig.1 Oblique crack rotor model and section z projection
在转子系统中,斜裂纹是转轴长期受到扭转振动的影响生成的。因此,本文考虑到横向、扭转以及轴向方向的载荷建立了分数阶斜裂纹转子动力学方程。
具体的动力学方程如下所示:

-mg+me(Ω+Drα)2cos(Ωt+α+φ)+

(1)

me(Ω+Drα)2sin(Ωt+α+φ)-

(2)



(3)
(4)
式中,各参数分别表示的是,M(t)为扭转激励;m为转盘质量;Jp为转盘转动惯量;c为横向振动方向的阻尼系数;x,y为两横向位移;cT为扭转方向的阻尼系数;α为扭转方向的扭转角;cu为轴向的阻尼系数;u为轴向位移;e为转盘的偏心距。
为了求解该动力学方程,需要事先确定系统的刚度。在固定坐标系下的刚度矩阵为[k]:
(5)
式中,kx、ky为两横向方向的刚度;kT为扭转方向的刚度;ku为轴向方向的刚度;kxy、kxT、kyT、kxu、kyu和kTu则是各耦合方向的刚度。在实际应用中大部分的转子系统一般很少受到轴向激励的作用,所以式(4)没有考虑存在轴向激励力。
式(5)刚度矩阵[k]是采用应力强度因子为零法计算获得的。

斜裂纹参数示意图如图2所示,在裂纹面上裂纹区域内的任意位置,总的第一应力强度因子KⅠ表示如下:

图2 斜裂纹示意图Fig.2 Schematic diagram of crack
KⅠ=KⅠξ′+KⅠη′
(6)
其中,KⅠξ′和KⅠη′为两个方向的第一应力强度因子,分别为:
(7)
(8)

对含有裂纹深度为a,倾角为β的斜裂纹转轴进行计算时,将转轴沿垂直于Y轴的方向进行划分。即可通过公式计算其在裂纹深度为a处的总应力强度因子为KⅠ和KⅢ。下列公式中E为弹性模量,v为泊松比;FⅠ、FⅡ、FⅢ为三项影响系数,能够根据文献[13]获得。
由于该斜裂纹转轴受轴向力q1,扭矩T和在X、Y两个方向的弯矩q2和q3四个方向载荷的共同作用。可得在各载荷的影响下,该转轴的应力强度因子如下:
对q1:
(9)
(10)
对q2:
(11)
对q3:
(12)
(13)
对T:
(14)
总应力强度因子为:
KⅠ=KⅠ1+KⅠ2+KⅠ3+KⅠ4
KⅢ=KⅢ1+KⅢ3
(15)
斜裂纹轴的能量释放率密度函数为:
(16)
则裂纹转轴释放的应变能可表示为:
(17)
根据卡氏定理可得附加柔度为:
(18)
计算得到无裂纹情况下转轴的柔度是:
(19)
斜裂纹轴的柔度为:
[c]l=[G1][Δc][G2]+[cs]
(20)
式中用到的转换矩阵[G1][G2]分别为:
(21)
(22)
对式(20)求逆即可获得该裂纹轴的刚度矩阵:
(23)
3 影响分析
本文研究在转速和裂纹深度一定时,分数阶次对动力学特性的影响。解方程所需各项参数具体如下所示,dp=76 mm;m=0.595 kg;L=0.46 m;d=9.5 mm;φ=π/6;ωT=0.6 Ω;E=210 GPa;v=0.3;c=41.65 kg/s;cT=0.009 1 kg·m2/s;cu=146.203 4 kg/s;Ω=300 rmp;α=d/2。
随着分数阶次的不断增大,得到如图3所示的系统响应分叉图。
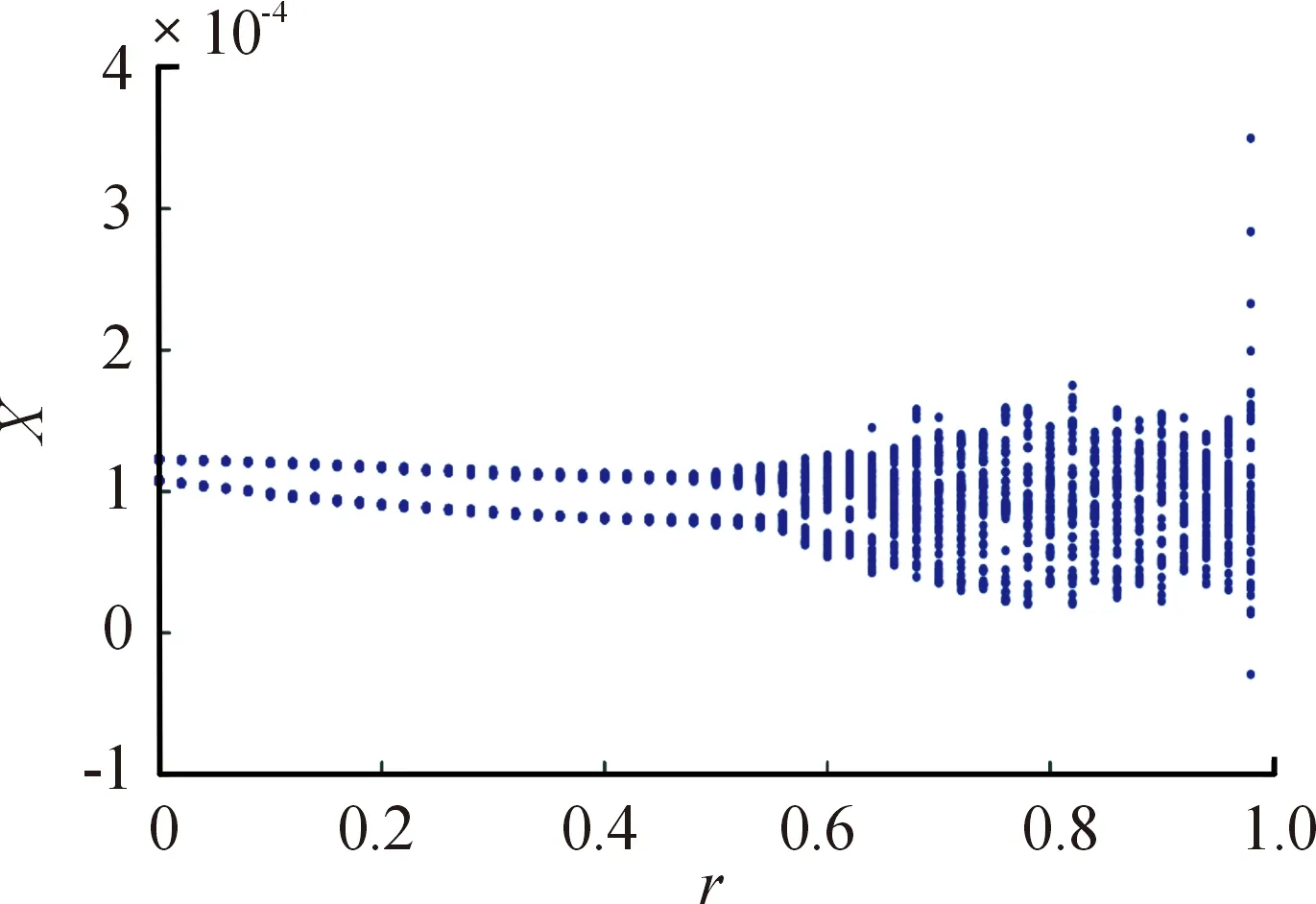
图3 分数阶阻尼阶次分岔图Fig.3 Bifurcation diagram of fractional order damping
从图3可知,随着分数阶次的改变,系统的振动特性受到了很大的影响。当分数阶次增大时,系统从倍周期运动状态逐渐成为混动运动状态。分别对r=0.2,系统处于倍周期运动状态时;r=0.5,系统开始进入混沌运动状态时;r=0.7系统彻底处于混沌状态时3个阶次进行数值分析。
当分数阶次较小时,系统处于周期运动状态,图4为当r=0.2时的数值分析结果。轴心轨迹图呈现典型的内8字形;相图是表征拟周期运动的封闭圆环;Poincare不动点呈密集点状出现,系统处于周期运动中;波形图呈现规律的周期性;横向频谱图中主要由不平衡量所造成的一倍频成分和由斜裂纹造成的2倍频成分组成;轴向频谱图包含1/2倍频成分和相对比较弱的1倍频成分。
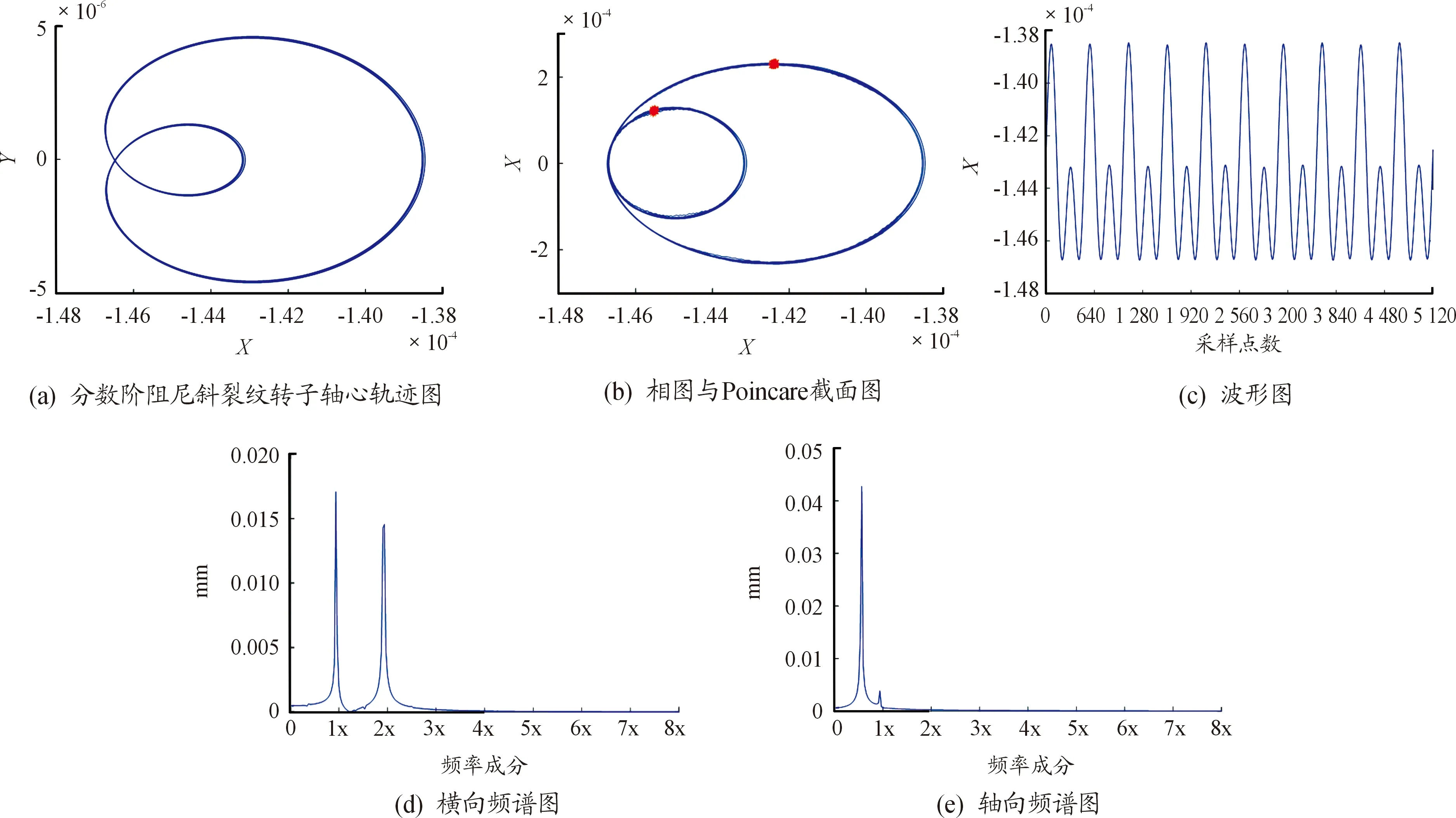
图4 r=0.2时轴心轨迹图、相图与Poincare截面图、波形图、横向轴向频谱图Fig.4 The axis trajectory,phase diagram,Poincare section,waveform diagram,transverse axial spectrum(Frctional order r=0.2)
随着分数阶次增大,系统初步进入混沌运动状态,图5为当r=0.5时的数值分析结果。相比阶次较低情况,轴心轨迹图开始变得混乱,形状较为模糊;相图开始出现杂乱曲线;Poincare截面图中不动点开始多次出现,系统逐渐脱离周期运动状态;波形图中幅值有所减小,同时出现了分岔谐波成分;横向频谱图中1倍频成分和2倍频成分减小,由于转轴受到的载荷作用,引起转轴刚度出现耦合成分,进而导致横向频谱图中开始出现其他低倍频成分;轴向频谱图中的各倍频成分幅值都有所减小。

图5 r=0.5时轴心轨迹图、相图与Poincare截面图、波形图、横向轴向频谱图Fig.5 The axis trajectory,phase diagram,Poincare section,waveform diagram,transverse axial spectrum(Frctional order r=0.5)
当分数阶次较大时,系统彻底进入混沌运动状态,图6为当r=0.7时的数值分析结果。可以看出此状态下系统轴心轨迹图混乱,不再呈现规则图形;相图中曲线混乱;Poincare截面图中不动点开始大量出现,系统进入混沌运动状态;波形图中幅值进一步减小,谐波成分增多,不再呈现周期性;横向频谱图中1倍频和2倍频成分幅值进一步减小,其他低倍频成分幅值增大;轴向频谱图中的各倍频成分幅值都进一步减小。
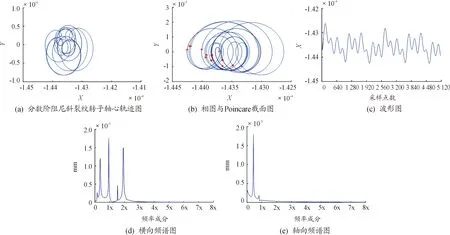
图6 r=0.7时轴心轨迹图、相图与Poincare截面图、波形图、横向轴向频谱图Fig.6 The axis trajectory,phase diagram,Poincare section,waveform diagram,transverse axial spectrum(Frctional order r=0.7)
4 结论
1) 当分数阶阶次r在增大过程中,转子系统从倍周期运动状态进入混沌运动状态;这一过程中,斜裂纹转子系统横向频谱中因扭转激励造成的频率成分与耦合激励造成的频率成分幅值都随之增大;轴向频谱中的频率成分都在减弱。
2) 分数阶阶次对分数阶斜裂纹转子系统的非线性动力学特性的影响十分明显。在研究斜裂纹转子系统时,采用分数阶的动力学方程能更加详细完整的描述转子系统的动力学特性。在实际应用过程中可以选择恰当的分数阶次描述斜裂纹转子系统不同状态的非线性动力学特性。
猜你喜欢
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学与财富(2021年34期)2021-05-10
火箭推进(2020年6期)2021-01-05
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
通信产业报(2018年40期)2018-01-22
移动通信(2017年3期)2017-03-13
数字技术与应用(2016年9期)2016-11-09
湖南师范大学学报·自然科学版(2014年3期)2014-10-24
