医科达Precise 医用直线加速器系统误差的分布特征
2021-10-21 01:48胡胜文郭瑞锋王泽辉刘佳麦燕华梁玉新
医疗装备 2021年19期
胡胜文,郭瑞锋,王泽辉,刘佳,麦燕华,梁玉新
广东医科大学附属医院放疗机房 (广东湛江 524001)
误差是影响放射治疗质量的重要因素。放射治疗的常见误差包括摆位误差和系统误差,两者均会影响靶区边缘剂量的准确性,导致产生剂量偏差,进而导致照射野内复发率的升高[1]。临床关于摆位误差[2-11]及其对照射剂量的影响[12-14]的讨论较多,而有关系统误差的报道较为罕见。本研究从医科达Precise 医用直线加速器的服务器PreciseNet 中提取日志文件,计算并分析系统误差,进而了解该设备各个运行参数的系统误差及分布规律,并将这些数据及分析结果存储到我科室自主研发的放射治疗信息系统中[15]。
1 材料与方法
1.1 数据选择及分析项目
于广东医科大学附属医院2018年2月6日至2021年1月13日存储于PreciseNet 服务器中的Precise 医用直线加速器运行记录中随机选取5 d(2018年2月6日、2018年6月14日、2018年9月20日、2020年2月1日,2021年1月13日)的数据。系统误差的分析项目包括臂架角度、小机头角度、钨门(一共4个,左右方向为X1、X2钨门,上下方向为Y2、Y1钨门)位置、输出跳数(一共2个,跳数MU1和备用跳数MU2)和多叶光栅[共40对、80片,X1(左)方向和X2(右)方向各40片]叶片位置及其随臂架角度的变化规律。
1.2 数据获取
1.2.1 数据准备
在PreciseNet服务器中,加速器运行的数据存放在数据表LINAC_SNAPSHOT中,表中的字段分别为LINAC_ID、LINAC_RECORD_ID、SNAPSHOT_SEQID、SNAPSHOT_RECEIVE_TIME、SNAPSHOT_DATA,其中SNAPSHOT_DATA字段的内容为设备的运行记录。每天有多位患者进行治疗,每位患者的放射治疗计划包含多个照射野,每个照射野包含若干个子野,每个子野治疗后在LINAC_SNAPSHOT表中产生一个记录。例如,加速器臂架角度记录如下:
Presc_Gantry Angle:Gantry Angle:270
Set_Gantry Angle:Gantry Angle: Run_Gantry Angle:Gantry Angle:270.2
即在处方中设置的臂架角度为270°,而治疗过程中的实际臂架角度为270.2°,其他运行参数也可以用类似的方法获得。
1.2.2 数据获取
使用芬兰Digia 公司的跨平台C++图形用户界面应用程序开发框架Qt5.7.0进行程序开发,其中QtSql 模块支持对数据库的读取。在PreciseNet 服务器的主机(Windows Server 2000)上设置开放数据库连接(open database connectivity,ODBC)连接到本地的服务器,在同一局域网中的Windows XP 电脑上,使用Qt 编写连接服务器端ODBC 的代码:
QSqlDatabase db=QSqlDatabase::addDatabase("QODBC");
QString dns=QString::fromLocal8Bit("DRIVER={SQL SERVER};SERVER= 10.2.0. 150; DATABASE=RTD4");
然后,使用查询语句“SELECT * FROM LINAC_SNAPSHOT”即可获取加速器的运行记录,并把每一条记录中SNAPSHOT_DATA 的内容单独保存为一个独立的文本文件。
1.2.3 数据分析
使用Python 3.8编程语言读取存放了日志记录的文本文件,提取臂架角度、小机头角度、钨门位置、输出跳数和多叶光栅位置的放射治疗计划设置数据和实际运行数据;使用Python 的NumPy、SciPy 和MatPlotlib 模块进行误差分析、非线性曲线拟合和数据显示,当系统误差呈现正态分布时,拟合为正态分布函数。
1.2.4 数据存储
将每天的系统误差数据及其分析结果导入我科室自主研发的放射治疗信息系统[15]。
2 结果
2.1 系统误差结果
图1为跨度4年中随机选取5 d 的臂架角度、小机头角度、钨门位置、输出跳数和多叶光栅位置的系统误差的平均值,表1为各个项目系统误差的范围、均值及标准差。由图1和表1可知,臂架角度、小机头角度及跳数MU1的系统误差均值均在0值或0值附近,而后备跳数MU2在处方设置时比跳数MU1多2 MU,且实际运行记录为MU1的值,故MU2的系统误差均值在-2附近;钨门位置及多叶光栅位置的系统误差均不在0值附近,且X1、Y1钨门的均值为负值,X2、Y2钨门的均值为正值,加之由于钨门及多叶光栅的叶片是成对出现的,它们的系统误差呈现距离相近、方向相反的现象;一般而言,第1、40对叶片在照射野外,第20、21对叶片处于射野内,由第1、20、21、40对叶片的系统误差对比结果可知,射野内及射野外叶片的系统误差并无明显差别。

图1 臂架角度、小机头角度、钨门位置、输出跳数和多叶光栅位置的系统误差

表1 系统误差的范围、均值及标准差
2.2 系统误差分析
选取2021年1月13日的数据进行分析,各项目的系统误差随臂架角度的变化趋势及频率图见图2~6。由图可见,除了多叶光栅的系统误差呈正态分布之外,小机头角度、Y 方向钨门、输出跳数均无明显分布特征,X 方向钨门系统误差与臂架角度呈现正弦变化特征。
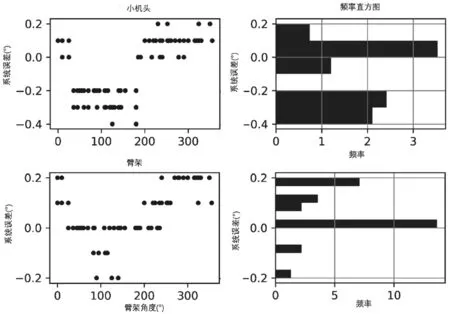
图2 臂架角度和小机头角度的系统误差随臂架角度变化分布图及频率直方图
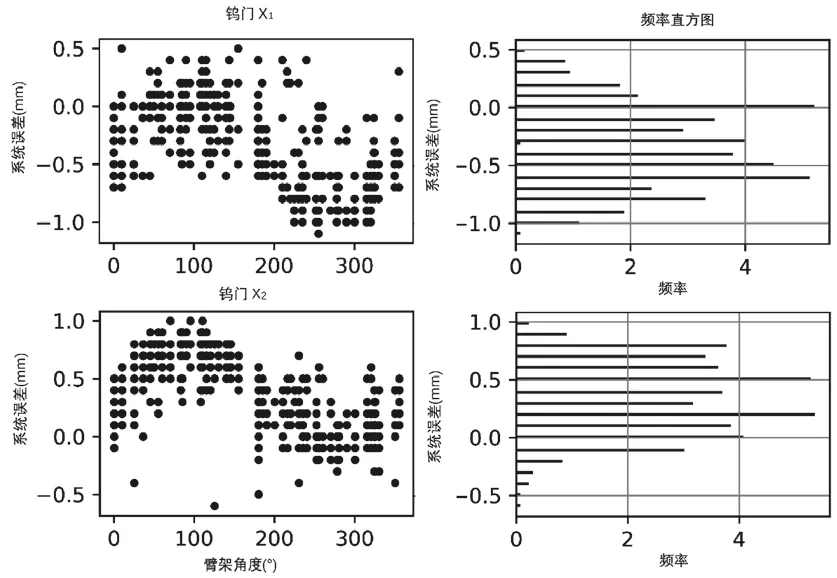
图3 X1(左)与X2(右)钨门的系统误差随臂架角度变化分布图及频率直方图

图4 Y1(下)与Y2(上)钨门的系统误差随臂架角度变化分布图及频率直方图

图5 跳数(MU1)和备用跳数(MU2)系统误差随臂架角度变化分布图及频率直方图

图6 多叶光栅系统系统误差随臂架角度变化分布图及频率直方图
2.3 X 方向钨门位置系统误差的拟合
由图3可以看出,X 方向的钨门X1、X2的系统误差随臂架角度的变化呈现出正弦三角函数的特征,考虑拟合模型为:

其中k、A、ω、φ分别为偏移、振幅、角速度、初相,均为需要通过拟合确定的参数。采用最小二乘法并使用模型(1)对图3中的数据进行拟合,钨门X1的拟合结果为:

钨门X2的拟合结果为:

由上述拟合结果可知,两个正弦曲线的振幅相同,角速度均接近于1,偏移距离相近,而方向相反。拟合结果见图7。

图7 X1 和X2 钨门的系统误差拟合为正弦曲线的结果
3 讨论
本研究通过编程的方法读取Precise 医用直线加速器的运行记录,获取每天的运行数据,进而了解设备的系统误差,此方法简单快捷,可快速得到分析结果。
通过数据分析发现,臂架角度、小机头角度、钨门及输出跳数无明显的分布特征,多叶光栅的系统误差均值服从正态分布但不在0值附近,且X1、X2方向的多叶光栅的系统误差均值是0.5 mm,且呈现偏差距离相近、方向相反的特性。X1、X2钨门的系统误差均值随臂架角度呈现正弦函数变化的特点,考虑为在设备使用间歇期,X1、X2钨门受地球重力作用大小不同的缘故。
在放射治疗中,影响患者治疗的剂量误差可以分为系统误差和随机误差。在随机误差中,学者们更多提及的是摆位误差,而很少提及医用直线加速器本身的系统误差,可能的原因是摆位误差对放射治疗的影响比较显著且比较容易获得。Precise 医用直线加速器的数据库是基于微软的SQL Server 6.5进行开发的,其运行记录直接以文本形式给出,提取数据需要具备数据库相关知识。另外我科室在用的医科达Synergy 医用直线加速器匹配的Mosaiq 服务器(基于SQL Server 2008开发)通过加密方式将运行记录保存至数据库,只有通过医科达公司协助解密才可以获得。
为了评估系统误差对放射治疗计划剂量误差产生的影响,我们下一步将利用患者治疗过程中的实际数据生成放射治疗计划,并通过与原计划进行对比,进而评估系统误差对剂量偏差的影响。
4 小结
医科达Precise 医用直线加速器各项目的系统误差均在允许范围内[1],X1、X2钨门的系统误差随臂架角度呈正弦变化,多叶光栅的系统误差则服从正态分布,同方向的多叶光栅(射野内和射野外)的系统误差无明显差异,射野内和射野外的多叶光栅的系统误差无明显差异,跳数几乎没有偏差,臂架角度、小机头角度及Y1、Y2钨门的系统误差无明显分布规律。
猜你喜欢
现代仪器与医疗(2021年5期)2021-12-02
中国工程机械学报(2019年6期)2019-12-31
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
大连理工大学学报(2016年5期)2016-10-12
系统工程与电子技术(2016年7期)2016-08-21
中国塑料(2015年6期)2015-11-13
装备环境工程(2015年5期)2015-02-28