
欠驱动无人艇有限时间轨迹跟踪控制
2021-10-21 08:50孙宏放张爱国
科技信息·学术版 2021年14期
孙宏放 张爱国


摘要:针对考虑外界干扰的欠驱动无人艇轨迹跟踪控制问题,本文利用有限时间理论和滑模控制技术设计了一种有限时间控制方案。为了简化控制器的设计,将轨迹跟踪误差系统分解为位置误差和速度误差两个子系统。首先基于位置误差子系统,为无人艇设计虚拟速度指令,使得位置误差子系统在有限时间内达到稳定。然后利用双曲正切函数,设计一种新型滑模变量和有限时间跟踪控制方案,使得无人艇的速度误差子系统趋于稳定。最后通过李雅普诺夫理论证明了控制器的稳定性,仿真结果说明了本文所设计方案的有效性。
关键词:欠驱动无人艇;有限时间控制;轨迹跟踪控制;滑模控制
引言
快速而精确的轨迹跟踪控制是无人艇执行各种任务的基础,随着无人艇在边防巡逻、极地探测、调查取证等领域的广泛应用,无人艇轨迹跟踪控制问题成为了各国的研究热点。近年来,涌现出了PID控制、反步控制、滑模控制等多种轨迹跟踪控制方法 [1-6]。忽略无人艇自身的不确定性和外界干扰,文献[1-2]提出了一种非线性PD控制器,形式简单便于应用。为了处理扰动和系统不确定性,文献[3]和[4]设计了一种基于反步法的鲁棒姿轨迹踪控制器。文献[3,4]有一个共同的缺点:基于反步法设计的控制方案可能存在“微分爆炸问题”,使得控制力矩趋于无穷大。为了解决这一问题,文献[5-7]为无人艇设计了基于动态面的非线性控制方案。滑模控制对外界扰动和系统参数不确定性具有强鲁棒性,在无人艇控制领域具有广泛的应用[8-10]。
忽略外界扰动和系统参数不确定性对系统的影响,文献[8]为无人艇设计了轨迹跟踪控制方案。值得注意的是,无人艇所处工作环境具有各类干扰因素(主要由风力和水流产生),若忽略这些扰动因素对系统的影响,可能无法达到理想的控制精度,甚至造成系统失稳。鉴于此,文献[9,10]利用积分滑模控制和神经网络技术为全驱动无人艇设计了鲁棒抗干扰控制器,可有效处理外界扰动。考虑欠驱动无人艇的抗干扰鲁棒控制,文献[11-13]结合自适应律和滑模控制策略,为无人艇设计了可在线估计未知干扰的控制算法。考虑无人艇在行驶过程中所受到的状态约束和控制输入约束,文献[14,15]利用边界层李雅普诺夫函数,为水面无人艇设计了渐进轨迹跟踪控制方案。
文献[1-15]所设计的控制方案虽然可以达到轨迹跟踪控制的目的,但控制系统都是渐进稳定的,时间趋于无穷大时系统才会达到稳定状态。相比于渐进稳定控制方案,有限时间控制方案可在有限时间内完成控制任务,具有更高的控制精度,同时控制方案对外界扰动具有更强的鲁棒性。因此,针对无人艇的有限时间控制问题引起了国内外学者的广泛关注[16-18]。基于一种新型有限时间扩张状态观测器,文献[16]提出了一种自适应控制方案,可有效解决无人艇协同控制问题。针对同一问题,文献[17]将该观测器和输出前馈控制方案相结合,提出了一种新型无人艇编队控制方案。考虑多个无人艇在编队过程中受到的视线距离约束和视线角约束,文献[18]提出了一种基于边界层李雅普诺夫函数的容错控制方案。
虽然文献[16-18]可解决无人艇有限时间控制问题,但所针对的对象为全驱动无人艇,无法解决欠驱动无人艇的有限时间控制问题。着眼于这一点,本文利用滑模控制策略,为无人艇设计了一种有限时间抗干扰控制方案。在设计控制器的过程中,通过严格的数学推理和数值仿真验证了本文所设计控制器的有效性。
1 无人艇的数学模型
参考文献[19],无人艇的三自由度运动学和动力学模型可描述为:
根据定理2可知,速度误差在有限时间内收敛至区域Δu和Δv,根据定理1可知,位置跟踪误差xe和ye将在有限时间内收敛至区域Δx和Δy。
至此,本文的理论证明部分已完成。
4 仿真验证
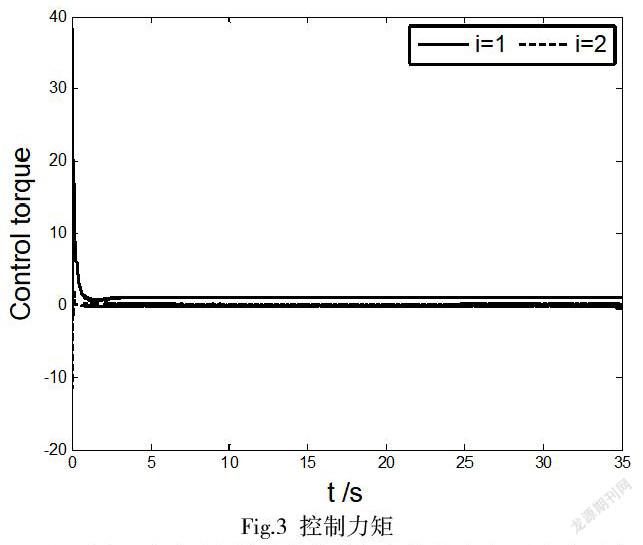
可以看出,在本文所给出的控制方案的作用下,无人艇可在15S内准确跟踪参考轨迹。图3为控制力矩曲线,从图中可看出,本文所设计的控制方案的最大输出力矩为20N·m。在初始时刻无人艇的跟踪误差较大,需要较大的力矩控制其跟踪给定轨迹。系统达到稳定后,无人艇的控制力矩趋于平稳。根据仿真结果可知,本文所设计的控制方案可使无人艇准确跟踪参考轨迹。
5 结论
针对无人艇的轨迹跟踪控制问题,本文利用双曲正切函数提出了一种非奇异有限时间滑模面,并在此基础上设计了有限时间轨迹跟踪控制器。该控制器在外界干扰的影响下,依然能够在有限时间内完成对参考轨迹的跟踪。
参考文献
[1]Yunsheng F,Xiaojie S,Guofeng W,et al.On fuzzy self-adaptive PID control for USV course[C]//2015 34th Chinese Control Conference (CCC).IEEE,2015:8472-8478.
[2]Miao R,Dong Z,Wan L,et al.Heading control system design for a micro-USV based on an adaptive expert S-PID algorithm[J].Polish Maritime Research,2018,25(2):6-13.
[3]Xu H,Oliveira P,Soares C G.L1 adaptive backstepping control for path-following of underactuated marine surface ships[J].European Journal of Control,2021,58:357-372.
[4]Deng Y,Zhang X,Zhao B,et al.Event-triggered compound learning tracking control of autonomous surface vessels in the measurement network[J].Ocean Engineering,2021,228:108817.
[5]Dai S L,He S,Ma Y,et al.Cooperative Learning-Based Formation Control of Autonomous Marine Surface Vessels With Prescribed Performance[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2021.
[6]Zheng Z,Sun L,Xie L.Error-constrained LOS path following of a surface vessel with actuator saturation and faults[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2017 (99):1-12.
作者簡介:
孙宏放(1978.8),男汉族 安徽桐城人 学历:博士研究生 职称:副研究员,从事科技创新、人才引进、成果转化和产业化等工作。
张爱国(1978.4),男汉族 山东巨野人 学历:博士研究生 职称:助理研究员,从事平台搭建、创业孵化、成果转化和产业推广等工作。
