
磁悬浮高速电机临界转速分析
2021-10-23 09:57彭利明
工程技术研究 2021年15期
张 芳 ,彭利明
1.空调设备及系统运行节能国家重点实验室,广东 珠海 519070
2.广东省高速节能电机系统企业重点实验室,广东 珠海 519070
3.珠海格力电器股份有限公司,广东 珠海 519070
1 转子动力学临界转速计算理论基础
1.1 临界转速的定义
由于材质不均匀及制造安装误差等原因,当转子的转速达到某一定值时,离心力持续作用电机转子激发的横向振动就会很强烈,振幅剧烈增大;若继续提高转子的转速,振动就会衰减,运转又趋于平稳;但当转速达到另一较高的定值时,强烈振动又重新出现,这种使转子产生强烈振动的转速便称为转子的临界转速。转子的工作转速不能与其临界转速重合或接近,否则会发生共振,而使轴系发生破坏。
1.2 临界转速的计算原理
对于一个实际连续的转子系统,经离散化后就变成一个多自由度系统,根据弹性力学有限元理论,对于一个N自由度线性弹性系统,其通用基本动力学运动方程如下:


在转子动力学中,上式需增加陀螺效应和旋转阻尼,其动力学方程如下:

式中:[G]、[B]分别为陀螺矩阵和旋转阻尼。陀螺矩阵[G]取决于转速,并且对转子动力学计算做主要贡献,这个矩阵对于转子动力学计算分析是必不可少的,旋转阻尼矩阵[B]也取决于转速,且明显地修改结构刚度,并且能够使结构产生不稳定的运动。
2 磁悬浮电机转轴临界转速计算分析
2.1 模型建立
转子作为旋转机械的核心部件,本身零件数量众多,属于复杂装配件,在高压、高流量的环境中运行,所涉及的相关理论极为复杂。文章只考虑影响转子动力学性能的主要因素,对转子系统进行简化,有限元仿真使用的转子模型结构如图1所示,转子系统关键参数如表1所示。

图1 磁悬浮电机转子系统结构模型
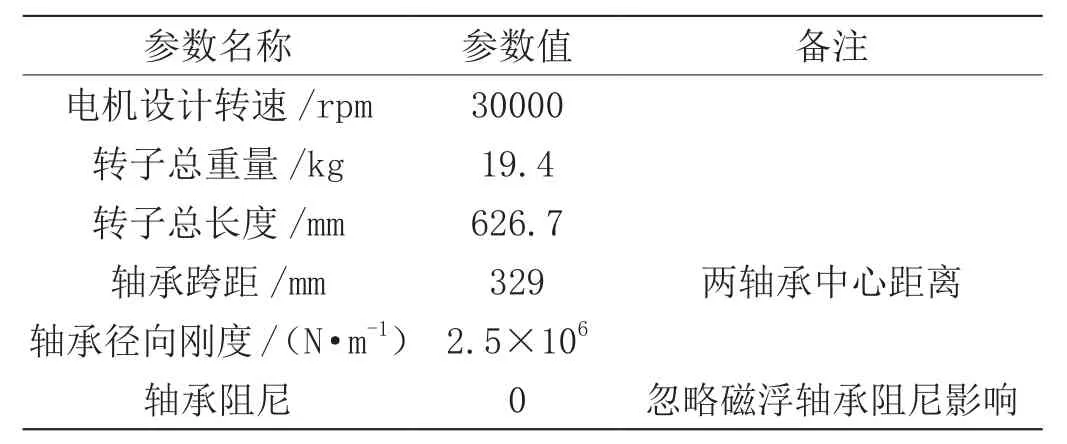
表1 转子系统关键参数
2.2 临界转速求解
为使计算结果更精确,考虑转子陀螺效应对其临界转速的影响,得到多个自转频率值对应的进动频率,并绘制成转子轴承系统的坎贝尔图,如图2所示。

图2 坎贝尔图
在计算转子临界转速时,通常只考虑同步正向涡动时的振动频率,通常说的临界转速指的也正是转子做同步正向涡动时的临界转速。反映在坎贝尔图上,则为激励直线与各阶同步正向涡动频率曲线的交点,其计算结果如表2所示,各阶模态振型图如图3所示。由表2中的计算结果可知,转子一阶弯曲振型所对应的临界转速为57595rpm,远大于其工作转速30000rpm,说明结构设计安全可靠。

表2 转子临界转速计算结果 单位:rpm
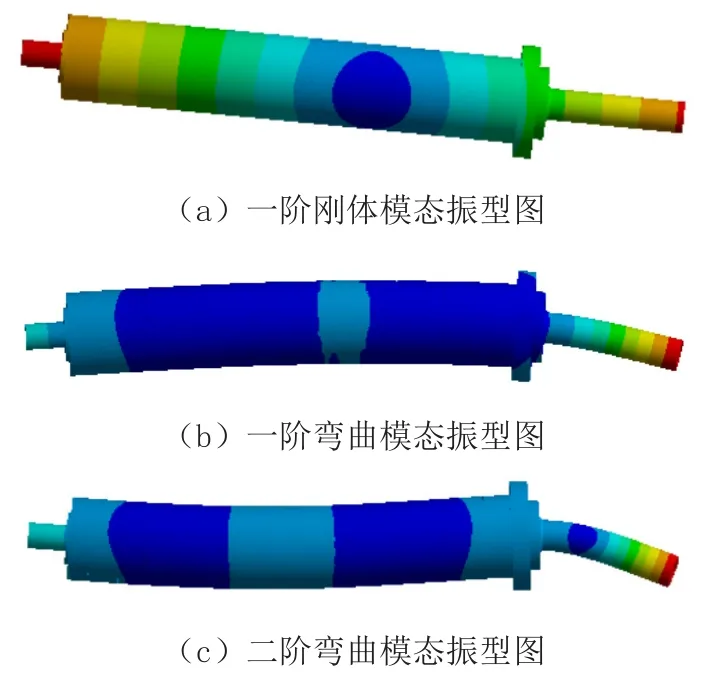
图3 转子各阶模态振型图
2.3 轴承刚度对临界转速的影响
考虑磁悬浮轴承刚度变化时,转子临界转速受其影响的情况,绘制转子临界转速随磁悬浮轴承刚度变化图,如图4所示,由图4可知,轴承刚度的变化主要影响转子的刚性模态,刚度越大,则转子刚体模态对应的临界转速越高,而对其弯曲模态则几乎无影响。
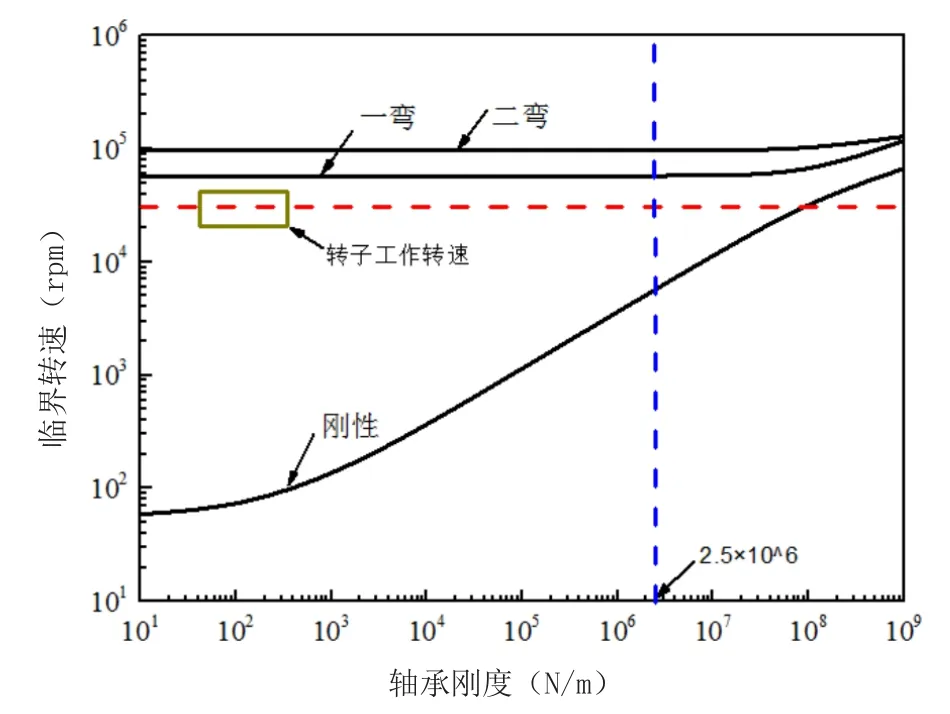
图4 转子临界转速随磁悬浮轴承刚度变化图
2.4 悬臂端重量对临界转速的影响
转子在实际应用中,悬臂端会根据需要安装相关结构部件使转子临界转速发生改变。文章对转子悬臂端重量发生变化时,转子临界转速受影响的情况进行了分析计算,并绘制了转子临界转速随悬臂端重量变化图,如图5所示。由图5可知,转子的弯曲临界转速对悬臂端重量非常敏感,很小的重量变化都能造成弯曲临界转速的急剧下降,故在设计转子结构时,在保证其使用的前提下,应尽可能减小悬臂端零部件的重量。
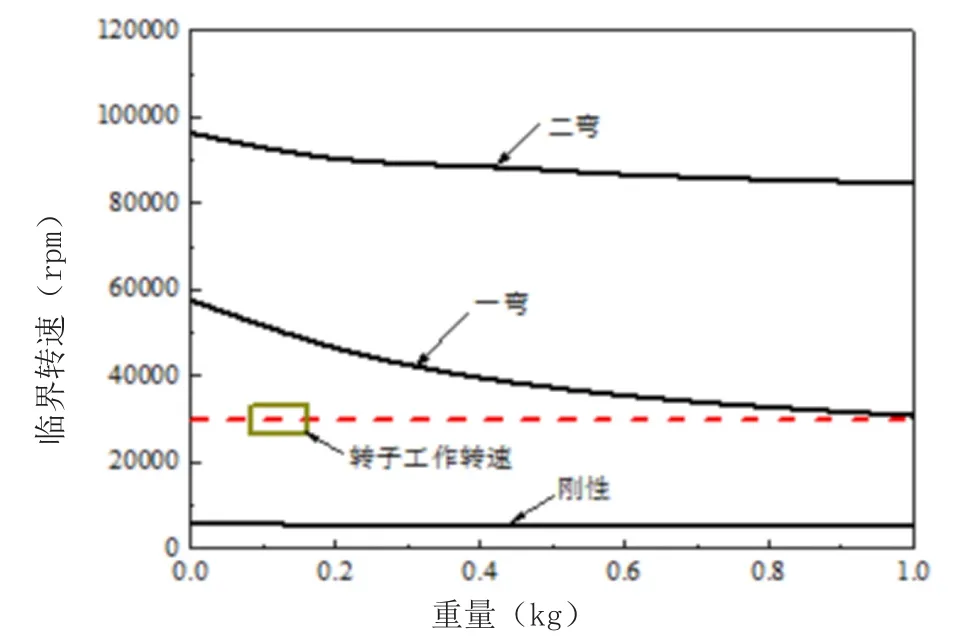
图5 转子临界转速随悬臂端重量变化图
3 对拖轴系转子模态仿真
为准确测定电机输出功率、效率、功率因数、定转子温升等性能参数数据,必须采用对拖的方式进行模态仿真,由于测试过程中两台电机的转子连成了一个新的轴系,整个系统转子模态势必将发生变化,综合考虑被试电机与陪试电机转子的连接关系,研究多种联轴器不同处理方式情形对轴系弯曲模态的影响,仿真参数设置情况如表3所示。

表3 轴系仿真参数
3.1 忽略联轴器重量的影响
由于实验时所用联轴器为柔性联轴器,可认为联轴器并不影响转子弯曲模态固频。当不考虑联轴器重量时,求出的转子模态振型如图6所示,一阶弯曲及二阶弯曲模态所对应的临界转速分别为26256rpm及72942rpm。

图6 忽略联轴器重量影响对拖轴系模态振型图
由仿真结果可知,磁悬浮电机主轴的弯曲模态几乎不受减速机主轴的影响,之所以一、二阶弯曲模态对应的临界转速值下降迅速,是因为轴伸端引入了一法兰盘的重量。与此同时,该情形主轴一阶弯曲临界转速已低于电机的30000rpm设计转速,测试时势必会存在越阶问题,会增大控制难度。
3.2 含集中重量单元联轴器
考虑到联轴器本身重量或许会对磁悬浮电机转子模态产生影响,对联轴器进行集中重量单元处理,并赋予其极转动惯量和直径转动惯量,求出的转子模态振型如图7所示,一阶弯曲及二阶弯曲模态所对应的临界转速分别为22908rpm及 69096rpm。

图7 含集中重量单元联轴器对拖轴系模态振型图
计算结果显示,引入集中重量之后,磁悬浮电机转子的一、二阶弯曲模态频率再次下降,且一弯临界转速同样低于电机的设计转速。
3.3 含实体单元联轴器
对联轴器进行实体单元处理,研究其具体结构形态对转子模态的影响,与集中重量单元情况形成对照。经求解,获得的转子模态振型如图8所示,一阶弯曲及二阶弯曲模态所对应的临界转速分别为20886rpm及68910rpm。

图8 含实体单元联轴器对拖轴系模态振型图
计算结果显示,相比集中重量单元情况,对联轴器进行实体建模后,磁悬浮电机转子的一阶弯曲固频有较为明显的下降,原因在于其位于磁悬浮电机转子的尾端,相当于是增加了转子的悬臂长,因此一阶弯曲固频才会呈现较大幅度下降趋势。从理论上来说,将联轴器按实体单元处理,会更符合实际情况。
4 磁悬浮电机对拖实验
为验证对拖轴系模态仿真方法的准确性,对磁悬浮电机进行对拖实验,现场测试情况如图9所示。通过实验发现,轴系系统在10200rpm时振动强烈,此时发生了共振,借鉴现有的研究经验,这可能是联轴器不对中产生了2倍频径向激励力,该情况会使轴系在临界转速一半时即被激发共振,这与含实体单元联轴器轴系模态仿真结果一致,验证了仿真方法的准确性,同时也进一步论证了,将联轴器按实体单元进行处理,会更接近实际情况,从而带来更高的仿真精度。

图9 磁悬浮电机对拖实验现场图
5 结论
文章通过对单个磁悬浮电机转子与整体轴系的模态仿真分析,得出了以下结论:(1)单个磁悬浮电机转子一弯临界转速为57595rpm,距转子设计转速30000rpm有足够的安全裕度,满足电机设计的要求,但电机与负载相连时,轴系固频会发生改变,需重新考虑转子的动态特性。(2)磁悬浮轴承的刚度主要影响转子刚性模态,对弯曲模态几乎无影响;同时转子弯曲临界转速对轴伸悬臂端重量的变化非常敏感,设计时应尽可能降低悬臂端重量。(3)对于对拖试验台整体轴系情况,若选用柔性联轴器连接电机转子与陪试电机转子,转子弯曲模态几乎不受陪试电机转子影响,两者不会产生耦合。(4)对于对拖台整体轴系,磁悬浮电机主轴的一弯频率计算值已低于电机的设计转速,之所以比单个轴系下降剧烈,主要是因为受悬臂端法兰盘及联轴器重量的影响,实验时应尽可能选择重量轻的联轴器和法兰盘。(5)文章计算得到的轴系一弯频率与实验结果较为吻合,验证了文章仿真方法的准确性。
猜你喜欢
防爆电机(2022年3期)2022-06-17
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
江苏安全生产(2021年5期)2021-07-16
船舶标准化工程师(2019年4期)2019-07-24
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
设备管理与维修(2016年7期)2016-04-23
舰船科学技术(2016年1期)2016-02-27
船海工程(2015年4期)2016-01-05
