
解线性方程组迭代法的若干几何研究
2021-10-30 09:00卢兴江金通洸
大学数学 2021年5期
卢兴江, 金通洸
(浙江大学 数学科学学院,杭州310027)
1 引 言
迭代法是解线性方程组常用的方法,如著名的Jacobi迭代法,Gauss-Seidel迭代法和SOR迭代法[1]等.但对这些迭代过程的认识、收敛性分析等一般是从分析和代数上去研究,例如一个迭代法的收敛与否决定于相应迭代矩阵的谱半径是否小于1,而求谱半径并非易事,而且仅从谱半径去认识迭代法的收敛性是不够的,一个简单的事实是:对某些线性方程组,若变换各个方程的次序,会改变一些迭代法的收敛性,而解的存在与否是和这些方程的次序无关的.要对这样的问题作出解释,揭示出迭代法的几何本质是重要的.下面将从几何上提出两种迭代过程,从而得到解线性方程组迭代法的几何实质.
2 记 号
记n阶线性方程组为
Ax=b,
(1)
其中A=(aij)n×n∈n×n为n阶系数矩阵,b=为n维常数向量,x=(x1,x2,…,xn)T为n维未知向量.
记Ai=(ai1,ai2,…,ain),fi(x)=bi-Aix,i=1,2,…,n,则(1)即为
fi(x)=0,i=1,2,…,n.
这n个方程分别代表n个超平面,记为πi,i=1,2,…,n.即
πi∶fi(x)=bi-Aix=0,
其中(Ai)T为πi的法向量,i=1,2,…,n.
3 迭代法的两个基本几何过程
对线性方程组(1),首先我们从几何上来看两个基本迭代过程.
(Ⅰ) 反射过程(反射迭代)
对方程组(1) 的n个超平面πi,i=1,2,…,n, 选定一组方向(向量)Ei∈n,i=1,2,…,n, 且E1,E2,…,En线性无关.则反射迭代为这样一个过程(如图1,其中x*为方程组的解)
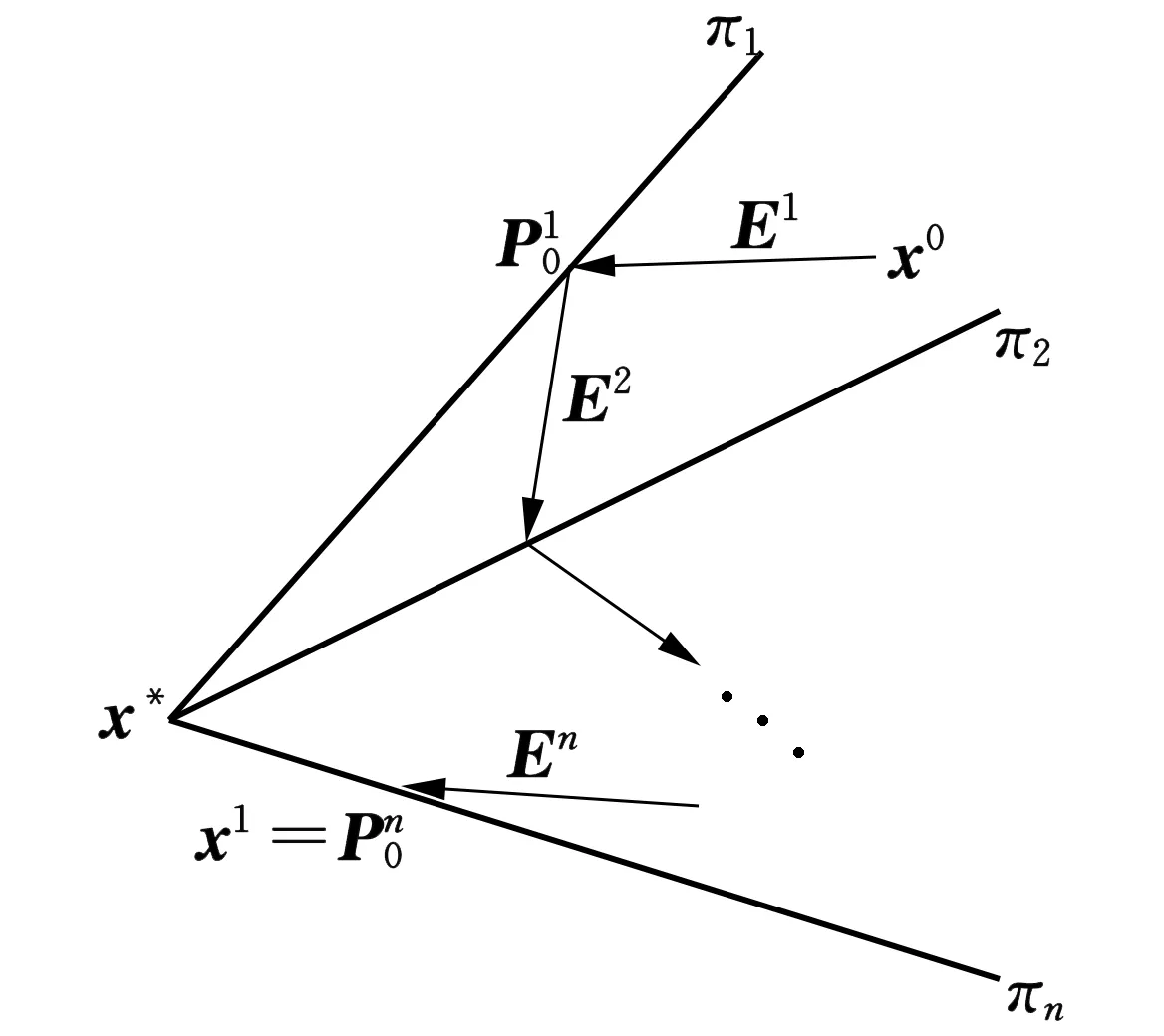
图1 反射迭代
① 选取初值(初始点)x0∈n;
③ 这样得到迭代向量序列{xn}∶x1,x2,…,xn,…
以上过程称为反射过程,或反射迭代.
定理1对方程组(1)及一组线性无关的方向E1,E2,…,En,若A非奇异,且Ai·Ei≠0 (i=1,2,…,n),则
(i)反射迭代可以一直进行下去;


(2)
其中(Rij)n×n称之为关联矩阵,Rij称为关联系数.
在反射迭代中,取不同的一组方向Ei(i=1,2,…,n),就可得到不同的迭代法.
定理2对方程组(1),若取一组线性无关的方向
Ei=εi=(0,0,…,0,1,0,…,0)T(εi第i个分量为1,其余分量为0)i=1,2,…,n,
则反射迭代即为Gauss-Seidel迭代法.
证若在反射迭代中取
Ei=εi=(0,0,…,0,1,0,…,0)T,i=1,2,…,n,

即
这恰为Gauss-Seidel迭代法计算表达式[1].
因此,Gauss-Seidel迭代法是一种反射迭代过程. 从这个几何本质可以看到,Gauss-Seidel迭代法的收敛性是与方程组的各方程(超平面)的次序是有关系的,因为它与“坐标”εi(i=1,2,…,n)有关,如图2和图3相同的两个方程(两张“超平面”),次序不同,收敛性不同 .

图2 G-S迭代收敛 图3 G-S迭代发散
如果在上述反射过程中引进一个伸缩因子,则有以下迭代过程,我们称之为伸缩反射过程(伸缩反射迭代):
① 选取初值(初始点)x0∈n;

图4 伸缩反射迭代
③ 这样得到迭代向量序列{xn}∶x1,x2,…,xn,….
显然,伸缩反射迭代中若取所有的伸缩因子为1,则伸缩反射过程即为前面的反射过程 .
定理3对方程组(1)和一组线性无关方向Ei,若AiEi≠0(i=1,2,…,n),则
(i) 伸缩反射迭代可以一直进行下去;
(ii) 对任意给定的初值x0∈n,存在唯一确定的伸缩因子使得迭代n步即得方程组的精确解,即有x1=x*.
对于(i)的证明类似于定理1的(i)的证明 .
对于(ii),因为



此恰为SOR迭代法计算表达式[1].
所以,SOR方法为伸缩反射过程的一个特例.
定义1在n维空间中,n-1张超平面的交线称为棱,与此n-1张超平面法向皆垂直的方向称为棱方向.
记
其中Δij为A=(aij)n×n中aij的代数余子式.


其中Δ=det(A).
因此,对方程组(1)中的n个超平面,Ci(i=1,2,…,n) 即为n个棱方向.
定理5若取Ei=Ci(i=1,2,…,n),则对任何初值x0,反射过程进行n次即得方程组(1)的精确解,即x1为方程组(1)的解.

即x1为方程组(1)的解.
由定理5知,选取Ci(i=1,2,…,n)为反射方向,有限步(n步)迭代可得到方程组的精确解.
推论1若取Ei=Ci(i=1,2,…,n),且取初值x0=0时,则反射迭代所得x1即为方程组(1)的克兰姆[2](Cramer)法则解.


于是
(Ⅱ) 张伞过程(张伞迭代)
选定一组方向(基)Ei(i=1,2,…,n),对方程组(1),张伞过程为(图5):

图5 张伞迭代
① 任取x0∈n;

③ 这样得到迭代向量序列{xn}∶x1,x2,…,xn,….
事实上,这把伞为一个仿射标架:{xk,E1,E2,…,En},求方程组(1)的解x*就是在此仿射标架中求出x*的“坐标”.
定理6对方程组(1),若取一组线性无关的方向Ei=εi,i=1,2,…,n, 则张伞过程即为Jacobi迭代法.
即
此即为Jacobi迭代法计算表达式[1].
从上述可知,Gauss-Seidel迭代法与Jacobi迭代法有着不同的几何本质,前者是反射过程,后者为张伞过程. 在一般情况下反射过程比张伞过程收敛快,所以通常说Gauss-Seidel迭代法比Jacobi迭代法收敛快,但这两个迭代过程本质不同,因此存在对有的方程组Gauss-Seidel迭代法发散而Jacobi迭代法收敛的情况也就不足为奇了.
4 降维迭代法
由上面所述,选取棱方向进行反射迭代可有限步得到精确解,但是计算棱方向的计算量太大,所以在实际计算时不宜采用. 下面将找出一组容易计算的方向Ei(i=1,2,…,n),并能迭代有限步得到方程组(1)的精确解,将它称之为降维迭代法.
引理1若对方程组(1),反射迭代的方向E1,E2,…,En满足
AiEj=0,i=1,2,…,n-1;j=i+1,i+2,…,n.

定理7若Ei(i=1,2,…,n) 满足引理1条件,则反射迭代n步即得方程组(1)的精确解,即x1为精确解.

设A1,A2,…,An线性无关,记hij=Ai·Aj(i,j=1,2,…,n).令
(3)


①E1=A1;
②E2=W2;


确定,即由
(4)

称这样构造的一组方向Ei(i=1,2,…,n)为降维方向.
由以上易知,如果Ei(i=1,2,…,n) 为降维方向,则有
Ej·Ai=0,i=1,2,…,n-1;j=i+1,i+2,…,n.
定理8设Ei(i=1,2,…,n)为降维方向,则对方程组(1),反射迭代n步即得精确解.
证由引理1、定理7和降维方向的构造即得.
以降维方向进行反射迭代解线性方程组(1)的方法称其为降维迭代法.用降维法求解时,称反射迭代n步为迭代1次,因有计算误差,如果迭代1次误差不满足要求,可以将得到的x1作为x0继续迭代,这时因Ei(i=1,2,…,n)已经构造好,所以继续迭代时计算非常方便,计算量很小,但效果很好.
数值例子[3]:
精确解为x*=(-1,-1,…,-1)T.
以‖x-x*‖∞<ε来控制精度. 计算结果表明,用降维法迭代4次即得精度为10-6的解.
通过计算量分析,降维法与共轭梯度法为同一数量级,但降维法不要求A为对称正定,只要A非奇即可. 且数值例子表明,降维法比共轭梯度法更有效. 例如:
对Ax=b用降维迭代法迭代2次即得精确解.
5 总 结

致谢本文是基于博士阶段的工作,感谢导师金通洸先生的悉心指导.也以此文表示对金老师的无限怀念.
猜你喜欢
中等数学(2022年8期)2022-10-24
中等数学(2022年6期)2022-08-29
数学年刊A辑(中文版)(2021年3期)2021-11-05
数学年刊A辑(中文版)(2021年2期)2021-07-17
南京大学学报(数学半年刊)(2021年2期)2021-04-19
数学物理学报(2019年1期)2019-03-21
数学理论与应用(2016年1期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
数学年刊A辑(中文版)(2015年1期)2015-10-30
应用数学与计算数学学报(2014年4期)2014-09-26
