基于UWB技术的室内定位系统及其算法研究
2021-10-31 03:27胡丹妮李建峰赵洪森
丽水学院学报 2021年5期
胡丹妮,张 洁,李建峰,赵洪森,王 野
(丽水学院工学院,浙江丽水323000)
0 引言
超宽带(Ultra Wide Band,UWB)技术是一种无载波通信技术,利用纳秒级的非正弦波窄脉冲传输数据,与传统的室内定位技术相比,超宽带技术具有功耗低、安全性高、抗多径效果好等优点。这些优点能够使它在室内定位上有很好的应用前景。人们对于室内定位的需求日益增加,例如:在煤矿等突发灾难中,通过室内定位,引导救援人员以最快速度解救被困人员;2020年的疫情防控中,基于UWB定位技术的定位手环、定位标签,防止人员跨部门接触,做到人员的精确跟踪定位;在军事上,通过人员定位和设备追踪进行城市作战训练、弹药仓库管理和高级研发等[1-3]。因此,实现低成本且高精度的室内定位,具有非常重要的现实意义。
为此,我们将UWB技术、三边定位算法、飞行时间测距(Time of Flight,ToF)等技术结合为一体,以高精度室内定位需求为出发点,设计了基于基站/标签一体化的超宽带室内定位硬件系统和上位机验证平台。
1 理论分析与计算
1.1 UWB的主要特点
UWB具有以下特点[4]:(1)系统容量大;(2)数据传输速度快;(3)抗干扰能力强;(4)多径分辨能力强;(5)隐蔽性好;(6)定位精确;(7)功耗低。
1.2 定位方案选择
与传统定位方法不同,UWB定位技术并不是基于信号强度(Received Signal Strength Indicator,RSSI)的方法来获取位置信息,而是运用一定算法通过精确无线信号的发送和接收时刻来获取位置信息。UWB室内定位系统实现精确定位的前提是要获取与位置相关的信息和参数,建立相关的数学模型,根据这些信息和参数以及数学模型来解算电子标签的坐标。UWB定位技术应用最广泛的测距方式是飞行时间测距法(Time of Flight,ToF)以及到达时间差测距法(Time Difference of Arrival,TDOA)[5]。从定位方式来看都属于多点定位方式,即通过确定电子标签与多个已知基站的相对位置关系来实现定位。
一般情况下,定位一个电子标签需要知晓一些固定的已知位置的基站。根据数学理论知识,需要至少3个基站才能够实现二维电子标签定位,而最少4个非共面基站才能实现三维定位电子标签定位。
1.3 ToF测距
系统定位采用ToF(Time of Flight)算法计算定位标签与基站之间的距离。算法计算框如图1所示。ToF算法采用Two-way Ranging通信的形式计算UWB标签与基站间的距离[6-8]。
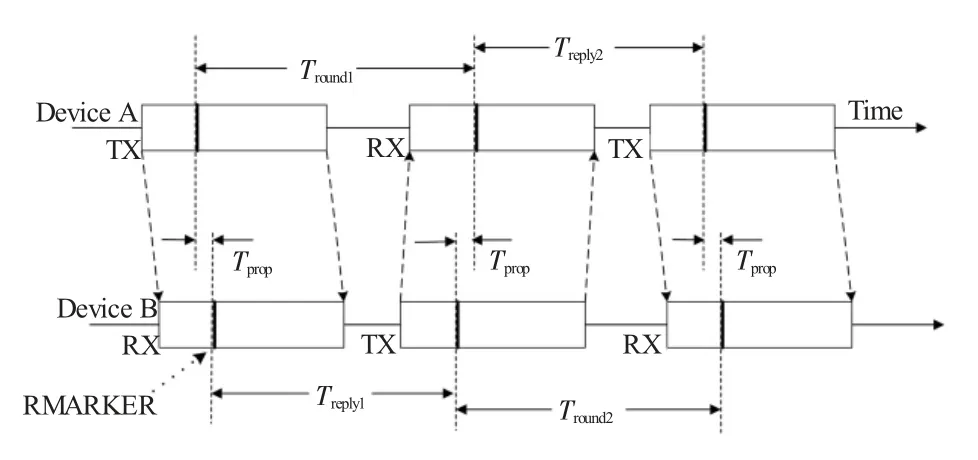
图1 Two-way ToF算法实现框图
设备A首先向设备B发出一个数据包,并记录发送数据包的时刻Ta1,设备B收到数据包后,记下收包时刻Tb1。之后设备B等待时刻Treply,在Tb2时刻,向设备A发送一个数据包,设备A收到数据包后记下时刻值Ta2。

算出电磁波在空中的飞行时间Tprop,飞行时间乘以光速即为两个设备间的距离。

1.4 三边定位算法的实现
三边定位算法(Trilateration algorithn)是一种常用的定位算法[9-12],其实现的方式如图2所示。设未知点位置为(x,y,z),令其中第一个球形P1的球心坐标为(0,0),P2处于相同纵坐标,球心的坐标为(d,0),P3球心坐标为(i,j),3个球形半径分别为r1,r2,r3。z为3个球相交点与水平面高度,则有:

图2 三边定位算法图解
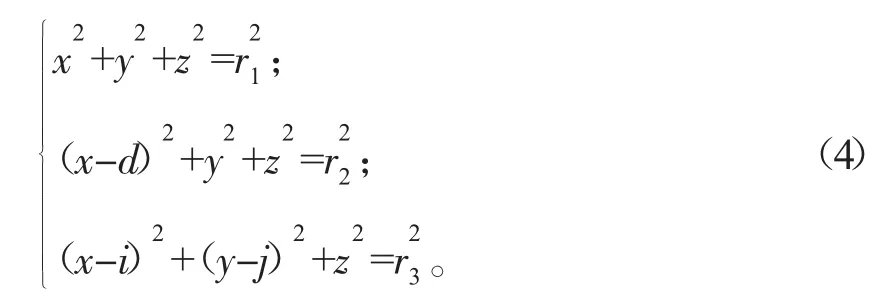
当z=0时,即3个圆在水平面上相交为一点,首先解出x:

将x代入到式(6)中得到y:

为了减少本系统的设计成本与算法的复杂程度,本系统在设计定位算法时选择了3个基站1个标签的定位模式。这种模式只适合二维定位,但是我们在电子标签上增加了气压计传感器模块,利用气压计传感器模块获得标签的高度值。当基站的坐标固定,且处于同一水平线上时,这种方法可以实现三维定位功能,一定程度上减少了系统的设计成本与算法复杂程度。
2 系统设计
UWB定位系统主要由可移动的电子标签、固定的通信基站、Qt上位机3大部分组成。在硬件系统中,标签依次向3个基站发起通讯,得到标签与基站之间的距离,进而通过蓝牙模块将数据发送至上位机进行运算和显示。UWB定位系统的系统设计框图如图3所示。
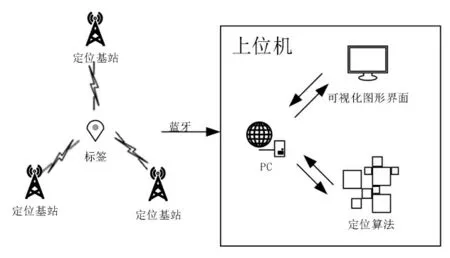
图3 UWB定位系统设计框图
2.1 硬件电路整体设计
系统采用Decawave公司DW1000芯片设计推出的超宽带收发模组DWM1000实现测距定位功能。DW1000 UWB芯片是一款按照IEEE802.15.4-2011协议标准设计的超宽带无线收发芯片,集成了天线及所有的射频电路,具有高精度、低功耗等特点。其内部框图如图4所示。
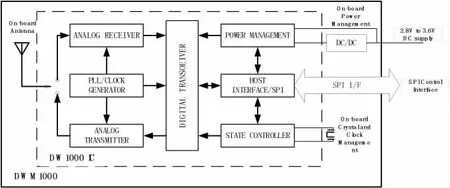
图4 DWM1000模块内部框图
本系统采用基站标签一体化的硬件电路设计,利用DW1000芯片通过拨码开关设置标签和基站。STM32F103芯片为主控芯片,气压传感器用于测量标签高度,蓝牙模块用于与上位机数据传输。如图5和图6所示。
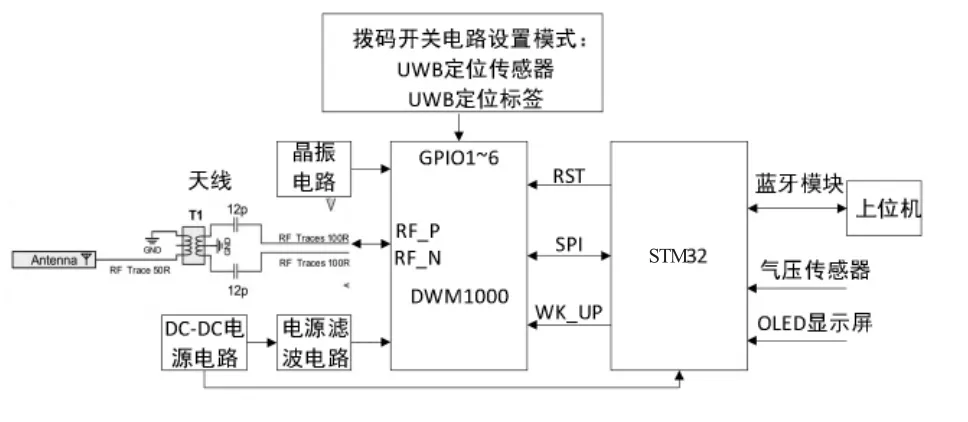
图5 UWB标签/基站一体化硬件设计框图
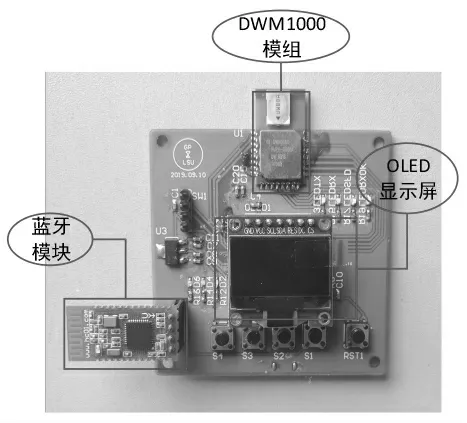
图6 UWB标签/基站硬件电路实物图
2.2 软件功能设计
根据设计要求,UWB定位系统基站的程序流程图如图7所示。基站上电后,若接收到来自标签的测距请求信号,则与目标节点完成测距交互,然后查询自身地址。若为0号基站,则将标签发送的距离数据帧,经过一定的处理后(处理0x00、0Xff无法正常发送的问题)发送至上位机显示。

图7 UWB定位系统基站程序流程图
UWB定位标签软件功能流程图如图8所示。电子标签上电初始化后,进入定位网络得到分配的指定地址,然后主动向3个基站依次发送测距交互请求,进行测距交互后获得标签与3个基站间的飞行时间,根据DS-TWR测距方式计算与各基站之间的距离,并将该距离信息拼帧后传输到0号基站(与可视化图形界面上位机通讯的基站),以便上位机坐标解算平台获取所需距离信息。

图8 UWB定位标签软件功能流程图
3 测试方案与测试结果
3.1 测试方案
将标签tag0和3个基站安装在实验室的测试环境,基站an0与an1间距为1.54 m,基站an1与an2间距为6 m,学生手持标签tag0在实验室内行走,实时测试标签与基站的距离,并检查UWB标签OLED和上位机显示该标签/基站的位置信息。如图9和图10所示。

图9 UWB标签和基站测试示意图
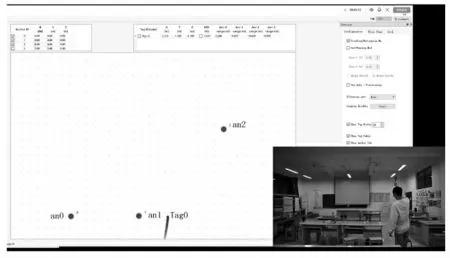
图10 实验室实测环境与上位机实时显示
3.2 测试结果
如图11所示,以某一组测试数据为例。UWB标签Tag0显示与基站an0、an1、an2的距离分别为0.53 m、0.99 m和3.84 m。上位机实时显示了标签与基站的坐标位置信息及其实时运动轨迹,如图12所示。
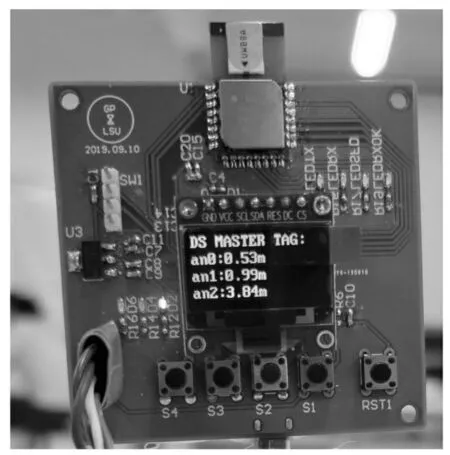
图11 标签与3个基站的测量距离显示
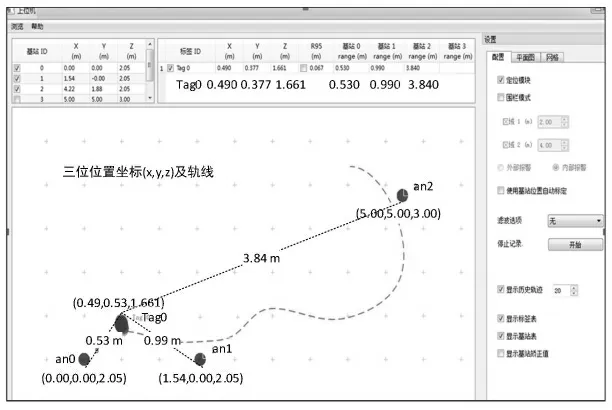
图12 标签/基站的三维坐标位置信息及实时轨迹
本系统实验以标签和基站an2数据采集为例,一共测量12次。在经过实际测量后,发现UWB室内定位系统在不同环境下的定位精度不同,这是因为不同环境对电子标签/基站测距有不同的干扰因素,如定位标签和基站间的本地时钟不同源导致同步上的误差、天线延迟误差、经纬度误差等因素,又如7 cm、9 cm和16 cm测距情况下出现了数据溢出。因此,在定位系统进行布置前,需要对UWB无线收发模块进行校准,在采集完N次数据之后,利用MATLAB,使用最小二乘法将该N个平均值完成曲线线性拟合,并将计算得到的拟合曲线代入程序代码中进行校准调试,使定位系统在该环境下能够获得更高精度的数据[13]。系统经过校准后,数据测试记录如表1所示。
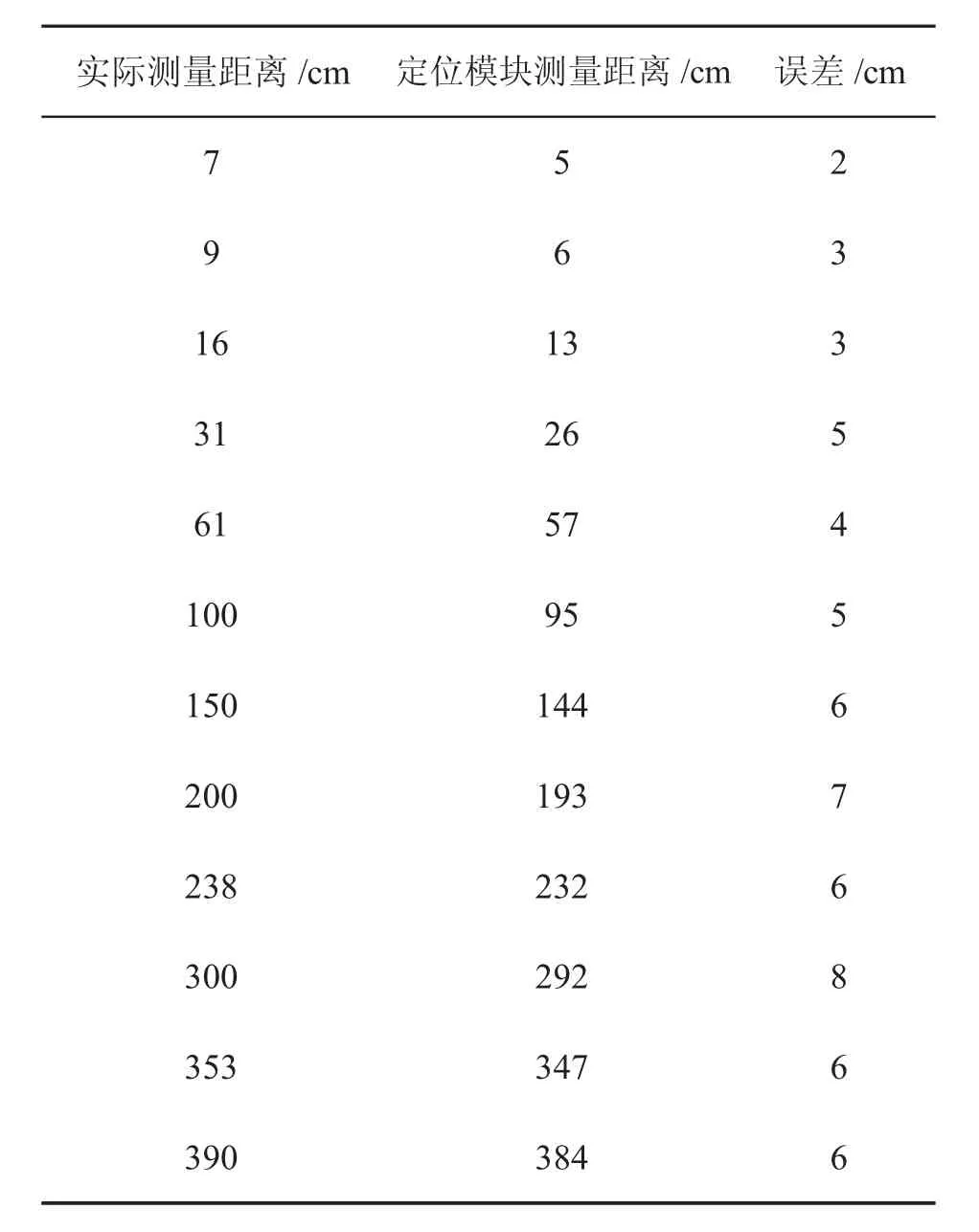
表1 实际距离与模块测量距离记录表
通过测试结果数据分析,标签tag0与基站an2测量的距离误差在10 cm范围内。上位机也实时显示了UWB标签/基站的三位坐标值和轨迹线图。
4 结语
本文根据UWB技术的特点,通过分析其通信技术和三维定位技术,设计了基于DWM1000基站/标签一体化嵌入式硬件系统,包括采用DWM1000作为UWB无线收发器,STM32F103为核心控制器。软件方面,利用ToF(Time of Flight)算法测量UWB标签与基站间的距离,通过建立三维空间坐标实时显示UWB标签的位置信息。实验数据显示,设计的UWB室内定位系统具有数据传输速度快,定位精确(小于10 cm)等特性。
猜你喜欢
橡胶科技(2022年10期)2022-11-03
导航定位学报(2022年4期)2022-08-15
计算机技术与发展(2022年1期)2022-02-22
汽车维修技师(2019年7期)2020-01-16
电子制作(2019年19期)2019-11-23
现代电子技术(2019年18期)2019-09-23
电子制作(2019年24期)2019-02-23
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
新高考·高一物理(2014年4期)2014-09-17