车路协同环境下干线交叉口货车车速引导模型研究
2021-11-06 12:10王扶春李文权
重庆理工大学学报(自然科学) 2021年10期
张 鹏,王扶春,李文权
(1.江苏大学 汽车与交通工程学院,江苏 镇江 212013;2.东南大学 交通学院,南京 210096)
随着经济的发展,货运出行需求持续增长,货运车辆向大型化、重载化方向发展。货车面对交通信号变化时,需要更长的时间、距离来加减速,这就导致货车停车再启动通过交叉口会造成更多的交通延误和空气污染,并且停车再启动对货车本身使用寿命和路面车辙的产生都会有很大影响。相关研究表明,货车停车再启动通过交叉口油耗值比匀速直接通过时油耗值大2.0~4.0倍[1]。近些年,随着车联网技术突飞猛进的发展,车与车、车与路实现了信息交互和共享通信,多目标协同配合达到优化利用系统资源、提高道路交通安全、缓解交通拥堵的目标[2]。因此,利用车联网环境给予货车车速引导,让货车直接通过信号交叉口而不是停车再启动通过可以有效减少行程时间,减低燃油消耗,缓解交通延误,减少闯红灯行为,并鼓励货车行驶特定线路。
国内外车速引导研究大部分集中在小汽车和公交车方面,针对货车车速引导的研究和应用较少。现有针对公交车车速引导的研究中,马万经等[3]提出了基于车路协同环境下保证公交行驶情况最优,设计了交叉口信号控制模型和最佳车速调整的策略。张鹏等[4]考虑了公交运行车速可以引导调节的环境,建立公交多申请下公交车速引导和交叉口信号配时集成优化的整数线性规划模型。G.Abu-Lebdeh[5]通过结合公交车辆速度和信号配时,提出了一种整合最优引导车速的动态交叉口信号配时算法模型,并通过仿真验证了模型的可行性。KeVin N.Balke等[6]讨论了在不破坏绿波带的情况下为信号交叉口提供公交优先控制的模型。上述针对公交车的车速引导模型研究中,引导模型中加减速时间为零,忽略了加减速过程,但是对于质量较大的货车,其加速度小,加减速过程缓慢,不能忽略加减速时间。
现有针对小汽车车速引导的研究中,李鹏凯等[7]基于车路协同环境,建立信号交叉口单车车速引导模型,求解汽车的最优行驶车速,并利用vissim仿真软件对实地交叉口进行仿真验证。Rakha H A等[8]通过计算通行时间来判断汽车是否需要变速,对于需要进行加减速的情况进行优化,以加减速时间为参数,以最小油耗为目标,建立交叉口车速引导模型。De Nunzio G等[9]通过剪枝算法设计最优速度曲线模型,计算速度比以往更快。Barth M等[10]利用车路协同环境设计单车动态速度规划模型来确保汽车不停车通行信号交叉口,并在仿真环境下验证了模型的节能减排效果。Xiang X等[11]研究了基于闭环反馈的引入汽车滑动的车速引导模型,利用汽车惯性滑动来补偿巡航,仿真验证说明对汽车的燃油经济性存在帮助。针对小汽车的车速引导模型研究中,小汽车引导模型加速度限值往往只给出经验估值,而货车变速器挡位传动比跨度大,低挡位加速度限值远超过高挡位的加速度限值,如果取低挡位加速度限值作为引导加速度经验估值,货车将难以按照给定引导策略行驶;如果取高挡位加速度限值作为引导加速度经验估值,货车难以发挥最大功率,加速和爬坡能力会受到很大限制。
综上,对于货车的车速引导模型的建立,有必要按各挡位加速度限值进行车速引导。为此,本文中结合换挡操作对货车进行车速引导来调节货车到达下一交叉口时刻,以总行程最短时建立车速引导模型。
1 模型构建
1.1 结合换挡操作的约束模型
为使研究问题明确化,设立以下假设:① 场景为车路协同环境,货车与路侧设备之间可随时进行双向通信;② 研究范围为单一干线交叉口,交通流处于非饱和状态,每个进口道交通流基于历史平均;③ 研究对象为单辆货车,不考虑车辆排队跟驰等外部因素,假定货车沿直线行驶;④ 假设货车100%服从换挡操纵和车速引导方法。
1.1.1基于换挡策略的货车加减速度限值
换挡操作采取最佳动力性换挡策略,同一油门开度下,若相邻挡位的加速度与速度曲线有交点,则该交点为此相邻挡位的升挡点;否则,取高挡位的最高车速作为升挡点[12],得出货车各挡位换挡车速vi,具体表达式如式(1)所示:

(1)

根据汽车动力学方程,车辆瞬时加速度a的表达式为:
(2)
式中:a为瞬时加速度,m/s2;Ttq为发动机输出转矩,N·m;ii为i挡时变速器传动比;i0为主减速器传动比;η为传动系机械效率;r为车轮半径,m;v为瞬时车速,km/h;f为滚动阻力系数;CD为空气阻力系数;δ为旋转质量换算系数;m为车重,kg;g为重力加速度,m/s2。
油门开度为100%时,求得换挡速度和各挡位能取得最大加速度限值。从式(2)可以看出,瞬时车速v越大,瞬时加速度a越小,为了保证换挡后车辆能持续取得各挡位给定加速度限值,规定各挡位加速度限值aimax以换入该挡的换挡速度vi代入式(2)求得。
车辆减速度限值与挡位操作关系较小,但货车减速到换挡速度时也要换挡,因为车速下降而挡位不降会导致脱挡,甚至造成熄火。极限状态下车辆60 km/h性能测试数据分析表明,制动时减速度限值通常小于-8.5 m/s2,但在实际驾驶过程中,驾驶员进行加减速操作时不会达到车辆的性能极限[13]。且驾驶员可以接受的最大减速度限值为-2.5~-1.5 m/s2[14]。因此,综合考虑货车性能与驾驶舒适度,设定货车减速度限值admax为-1.5 m/s2。
1.1.2基于时空运动轨迹的约束条件
货车车速引导策略:挡位总数为n的货车到达车速引导区时,挡位应调至初速度v0所匹配的m(1≤m≤n,m∈N)挡,其有车速引导轨迹如图1所示,时刻点对应时刻为货车换挡时刻和进入匀速行驶时刻。车速引导模型会引导货车从速度v0开始匀变速至最终车速vc后匀速通过交叉口,期间瞬时速度一旦达到换挡速度就进行换挡。换挡后加减速度限值发生改变,加减速度进行再次取值。随着每个挡位加速行驶时间t1,t2,…,tn、匀速行驶时间tc和最终车速vc的改变,货车的行驶轨迹会发生改变。
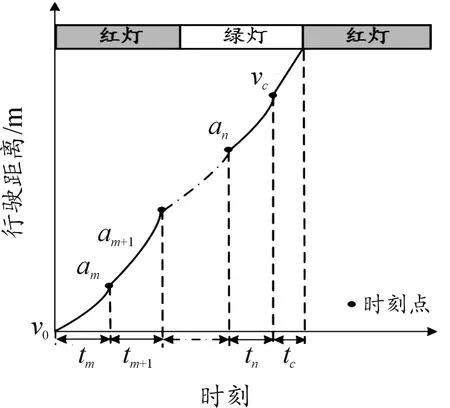
图1 车速引导模型下货车时空轨迹图
交叉口信号灯配时策略:设定信号开始时刻为该相位红灯开始时刻,即0时刻。
分析时空运动轨迹,需要满足的约束有:
1) 时间约束:
(3)
tj,tc≥0,j=1,2,…,n
(4)
sign(tk+1)≤sign(tk)
k=m,m+1,…,n-1
(5)
式中:ts为货车在引导区行驶时间(s);tj,tk,tk+1分别为j,k,k+1挡位行驶时间(s);tc为匀速行驶时间(s);sign()为符号函数,括号里的值为正数、0、负数时,分别取值为1、0、-1。建立式 (5) 的原因是避免货车行驶过程中越级加挡。

(6)
式中:tt为停车时间(s),为货车到达停车线时刻与当前相位绿灯开始时刻差值,如果差值为负数,则值为0;C为信号周期(s),默认信号周期开始时刻为0时刻;Gs为信号周期开始时,首次该相位绿灯开始时刻;dd为货车到达引导区时刻;floor()为向下取整函数。
2) 速度约束:
(7)
式中:vc为最终车速(km/h);aj为j挡位加速度取值(m/s2)。
(8)
式中:vm,vk,vk+1分别为m,k,k+1挡位换挡车速(km/h);ak为k挡位加速度取值(m/s2)。建立式(8)用来保证货车瞬时车速到达换挡车速时能立即换挡。
3) 加速度约束:
admax≤aj≤ajmax,j=1,2,…,n
(9)
式中:admax为减速度限值(m/s2);ajmax为j挡位加速度限值(m/s2)。
4) 运动学约束:

(10)
式中:Dz为引导区距离(m)。
1.2 基于最短行程时间的目标函数
研究内容是生成以最短行程时间为目标的最优轨迹曲线,行程总时间由行驶时间、停车怠速时间和停车再启动时间3部分组成。为方便计算,其中行驶时间为货车匀变速和匀速行驶总时间ts、停车怠速时间为停车时间tt、停车再启动时间tq*sign(tt),tq简化为车辆从静止加速至道路平均车速的时间,为定值。因此车速引导模型的目标函数为
Tz=ts+tt+tq*sign(tt)
(11)
式中:Tz为行程总时间(s);tq*sign(tt)为货车停车再启动时间;tq为定值,当停车时间tt为0时,货车再启动时间为0。
综上,最终数学模型为
(12)
1.3 模型求解
目标函数和约束函数都为线性函数,货车换挡车速vi、挡位加速度限值ak、货车进入引导区时刻dd和初速度v0、信号周期C、相位绿灯与红灯时长都为已知条件;挡位行驶时间tj、匀速行驶时间tc和最终车速vc为自变量,其余参数均可通过自变量表达,利用Matlab进行线性规划求解。
2 算例分析
使用Matlab软件对货车车速引导优化模型进行算例测试,通过算例结果验证模型的整体功能和效果。为使测试具有针对性,对测试的车辆、场景以及方案做出设定。
2.1 算例参数设置
在货车车速引导算例中,引导距离设为1 000 m;预设交叉口信号控制为固定配时,根据我国现行的交通法规,黄灯时车辆禁止通过停止线,为便于研究,将黄灯亮起时视为禁止通行,信号周期C=130 s,红灯时长70 s,绿灯时长60 s,周期开始时刻为相位红灯开始时刻,为0时刻,Gs=70。
现选取5挡货车JN162作为测试主体,其质量取值为17 000 kg,该型号货车求得的各挡换挡速度和加速度限值如表1所示。道路最高限速取60 km/h,道路不设最低限速,道路平均车速为50 km/h,tq经简单计算求得值为26.3 s。

表1 货车JN162最佳动力性换挡速度和各挡加速度限值
算例测试中调整货车进入车速引导区的初速度v0和到达时刻dd,使货车在不同挡位下以初速度v0行驶至交叉口出现停车再启动与直接通过2种情况,共计10种情形。同时对各情形在无车速引导策略下进行1次测试,将行程时间和停车时间作为对照。没有车速引导策略下的货车将保持匀速行驶至停车线。各测试场景的输入参数见表2。

表2 算例测试场景参数输入
2.2 算例测试结果分析
图2、3分别是有无车速引导情况下,货车在信号交叉口车速引导区域通行过程中的时空轨迹图,时刻点对应时刻为货车换挡时刻和进入匀速行驶时刻。

图2 无车速引导情况下货车时空轨迹图
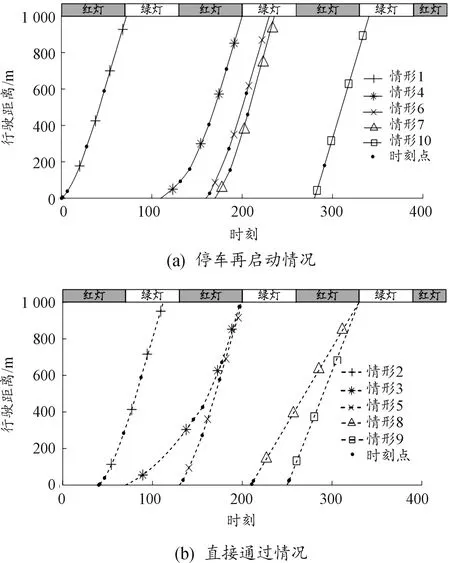
图3 有车速引导情况下货车时空轨迹图
从图2、3中可以看到:情形1、4、6、7、10属于无车速引导时停车再启动情况,情形2、3、5、8、9属于无车速引导时直接通过情况。在有货车车速引导的情况下,不论原速行驶时货车是否在交叉口发生停车,其到达交叉口的时刻都有所提前。由于货车停车再启动消耗时间过长,货车想要获得最短的总行程时间就需要避免停车,理想状态是一直以各挡位最大加速度加速至道路限速匀速通过路口,否则需要在绿灯开始时刻通过交叉口。
有车速引导情况下,情形1、2、6、7、10的时空轨迹图就属于一直以各挡位最大加速度加速至道路限速匀速通过路口情况,其到达交叉口的时刻未必是绿灯开始时刻。而情形3、4、5、8、9的时空轨迹图在车速引导模型下在绿灯开始时刻通过交叉口,说明在以各挡位最大加速度加速至道路限速匀速行驶至交叉口时,信号灯为红灯,则需要调整行驶轨迹,使得其在绿灯开始时刻通过交叉口。从无车速引导时停车再启动情况与直接通过情况来看,无车速引导时发生停车的情形在有车速引导时可全部顺利通过。因此当货车车速引导模型给出准确合理的车速引导方案时,能够在一定程度上减少交叉口停车等待次数和停车等待时间。
上述各情形仿真测试得出的有无车速引导方案行程总时间、停车时间及效果评价见表3和表4。

表3 无车速引导方案行程总时间和停车时间
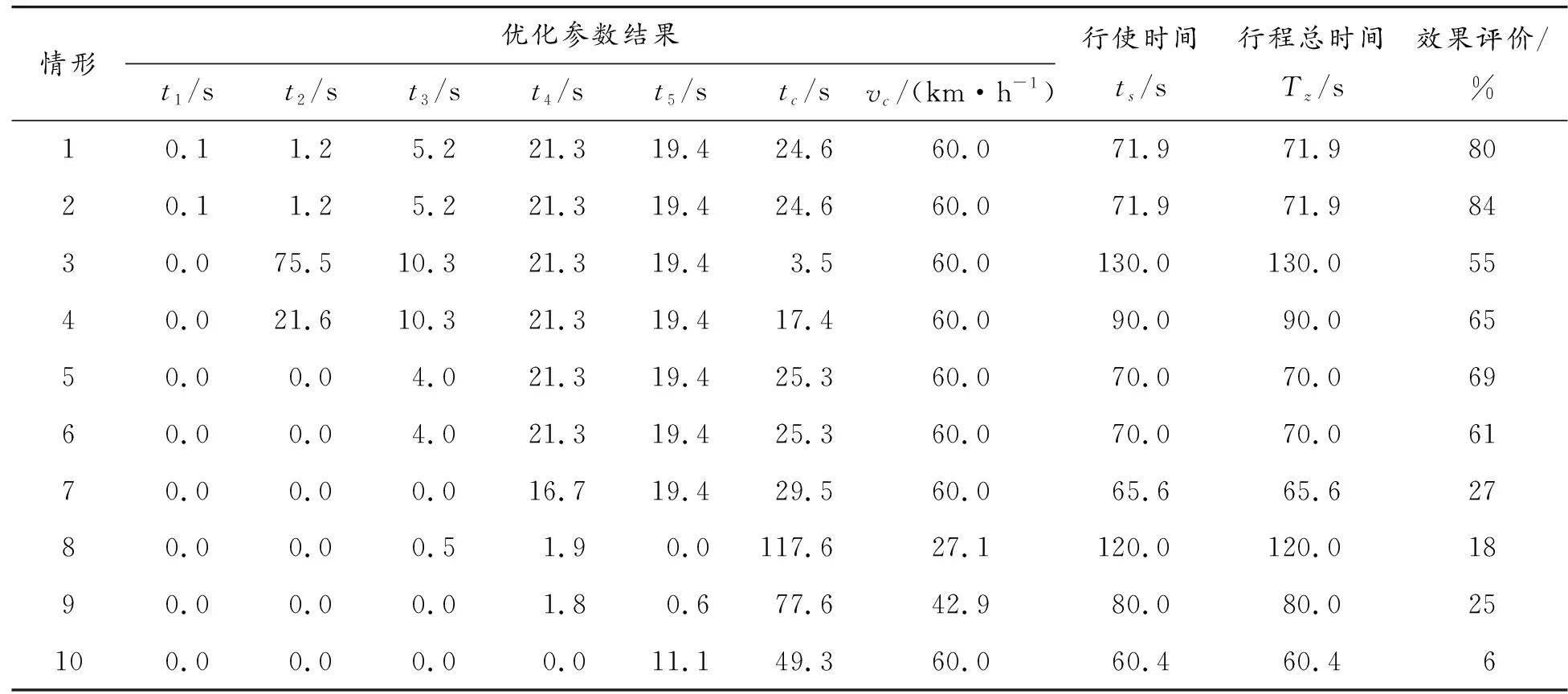
表4 有车速引导方案行程总时间及效果评价
可以看出,有车速引导模型的货车总行程时间情形均低于无车速引导模型的情形。从不同挡位情况来看,1、2、3挡行驶速度货车的总行程时间降低效果最好,可达61%~80%,这是因为如果驾驶员采取低挡位与低速度行驶至交叉口,不论是否存在停车再启动时间和停车时间,其至交叉口的行驶时间都过长。4、5挡的总行程时间降低6%~27%。由此可以看出,货车车速引导模型对于减少货车的总行程时间起到了一定作用。
3 结论
1) 提出了一种车联网环境下干线交叉口货车车速引导模型,弥补了以往车速引导研究对引导车辆的加速度取值存在的不足,结合换挡操作对货车各挡加速度限值进行计算来满足货车进行车速引导的约束条件。
2) 以总行程时间最短为目标进行车速引导建模,不仅减少了货车总行程时间,还减少了交叉口停车次数,有助于降低货车驾驶员劳动强度,可为货车智能驾驶提供理论参考。
本研究只考虑了单辆货车,未考虑车辆排队等行为,尤其在交通流量较大的时候,很难达到货车引导优化模型所建议的行驶时间。后期将在此基础上加入车辆排队等模型,进一步完善车速引导模型。
猜你喜欢
汽车维修技师(2017年6期)2017-11-18
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
环境保护与循环经济(2017年8期)2017-03-22
环境科技(2016年1期)2016-11-08
工程建设与设计(2016年8期)2016-03-11
中国房地产业(2016年2期)2016-03-01
工程建设与设计(2016年1期)2016-02-27
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
系统工程学报(2015年3期)2015-02-28