水陆两用车舵机控制系统的设计研究
2021-11-07 06:12胡海军于利民
探索科学(学术版) 2021年10期
胡海军 于利民
山东交通学院 山东 威海 264209
0 引言
水陆两用车(又名“水陆两栖车辆”)是同时具有陆地车辆和水上船舶性能的一种特殊车辆[1]。传统水陆两用车大多直接采用船舶的舵机控制系统,采用机械传动控制或者液压控制,整个系统构成复杂,可集成性差,与水陆两用车的陆上转向系统相互独立,不便于驾驶员进行操控。
在汽车领域,智能汽车、无人驾驶技术近几年飞速发展,这些技术不再是只停留在科幻片中,而是已经进入人们的日常生活;对于水陆两用车领域,智能化、无人化也是未来发展的重要趋势。
所以某新型水陆两用车项目,针对传统水陆两用车舵机控制系统的不足,并着眼于未来智能化的发展趋势,对水陆两用车的舵机控制系统提出了新的设计要求:
(1)受制于该型水陆两用车空间有限,舵机控制系统应结构简单,占用空间小,具备精度高、快速响应的特点。
(2)水陆两用车舵机控制系统应与陆上转向控制系统相融合,共用一套操控系统,即一个方向盘即能控制陆上转向,又能控制水上转向,并且能快速切换。
(3)舵机控制系统应具备数字化接口,便于与其他系统进行组网、集成,满足未来智能化升级需求。
1 方案设计
针对该项目的设计要求,综合分析后决定设计一套基于PLC的电动舵系统,该系统由切换装置、信号采集装置、PLC中控系统、电动转舵执行机构等组成,基本结构如图1所示。
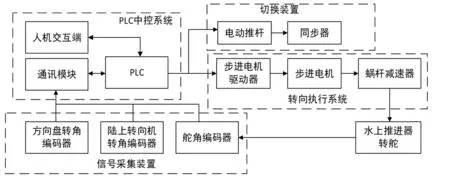
图1 系统基本结构图
1.1 硬件设备
(1)切换装置
切换装置为一套同步器和带拔插的电动推杆。由于水陆两用车陆上转向系统是沿用汽车转向系统,属于机械传动,所以采用了一套同步器作为切换装置,安装在方向盘与陆上转向器的传动轴上。该装置运用电动推杆加拔插来控制同步环的位置,来实现同步器上下端的连接和断开,进而控制方向盘与陆上转向器的连接和断开。
(2)信号采集装置
采用绝对型旋转编码器作为信号采集装置。舵机控制系统需要采集的信号为转角信号,而绝对型旋转编码器对于每一个角度位置都特定的编码,且不受断电影响,具有精确度高、抗干扰能力强的优点。本方案采用三个绝对值型旋转编码器,分别用以检测方向盘、舵机、陆上转向器的转角信号,并将信号传输给PLC中控系统。
(3)PLC中控系统
PLC中控系统主要由PLC主机、通讯模块、人机交互端组成。PLC主机采用西门子CPU 1214 DC/DC/DC,其集成PROFINET接口,具有强大的集成工艺功能和灵活的可扩展性等特点。其作为整个系统的“大脑”,负责处理、分析各种数据,并按照编程指令进行相应操作,如发送PWM控制信号、向与人机交互端发送舵角信号等。
通讯模块采用CM 1241 RS485,负责接收和发送RS485信号,主要为PLC提供编码器的转角数据,也是舵机系统与其他设备通讯的端口之一。
人机交互端(HMI面板),采用KTP 400 Basic mono PN设备,是西门子PLC的配套设备,其功能强大,能显示大量的文字、图像等信息,还拥有大量报警系统,最高可显示50个画面,128个实时变量。其作用是通过与PLC进行通讯,实时显示转舵系统的各中变量值及运行状态,如舵角值、方向盘转角;执行人工操作,对PLC发送操作指令,如控制切换系统的断开和连接等;接收PLC的指令,执行故障报警等。
(4)电动转舵执行机构
电动转舵执行机构主要由步进电机控制器、步进电机、蜗杆减速器等组成。根据喷水推进器的转舵扭力实验,并综合考虑船体内部空间等因素,最终选取57HSZ3N步进电机,及配套的HBS57步进电机驱动器和蜗杆减速器。步进电机具有输出力矩大、成本低的优点,且转速和转动角度都可由脉冲精确控制。蜗杆减速器具有扭矩放大的作用,为选用小功率、小尺寸步进电机提供了便利;还具有自锁功能,能避免舵杆反转而损坏电机。
1.2 工作模式
水陆两用车的转向控制存在以下三种情况:陆上行驶时,舵机控制系统不工作,直接关闭系统即可;水中航行时,前轮会进行提升,要求只进行水上转向控制,这时切换装置工作断开陆上转向连接;特殊情况下,方向盘可同时控制舵机转向和陆上转向,如上岸和下水阶段。
本系统的舵机控制具备三种工作模式:方向盘进行操控,上位机进行操控,通过数字接口由其它设备控制。
2 软件设计
运用西门子PLC专用编程软件STEP7进行本系统的软件开发,根据工作不同功能和要求,将程序主要分为数据处理模块、工作模式切换模块、转舵控制模块、人机交互端模块。
2.1 数据处理模块
数据处理模块主要是读取各编码器的转角数据,进行换算并储存,方便其它程序、设备调用;与其它设备进行通讯,接收指令或者发送数据。
2.2 工作模式切换模块
控制陆上转向系统接入和断开,为保证水陆两用车在水上和陆上正常行驶,以及车轮提升需求,要求方向盘打正,误差在许可范围,才能断开陆上控制系统;方向盘转角与陆上转向器转角差值在许可范围内,才可接入陆上转向系统;还设置有应急开关,特殊情况下,可以立即切换。
切换转舵控制模式,设置三个模式:方向盘操控、上位机操控、数字控制。方向盘操控模式,舵角设定值源于方向盘的转动;上位机控制模式,舵角设定值来源于人机交互端的手动输入;数字控制模式,其它设备通过数值化接口与系统进行通讯,设定舵角值。
2.3 转舵控制模块
转舵控制模块控制流程图如图2所示。
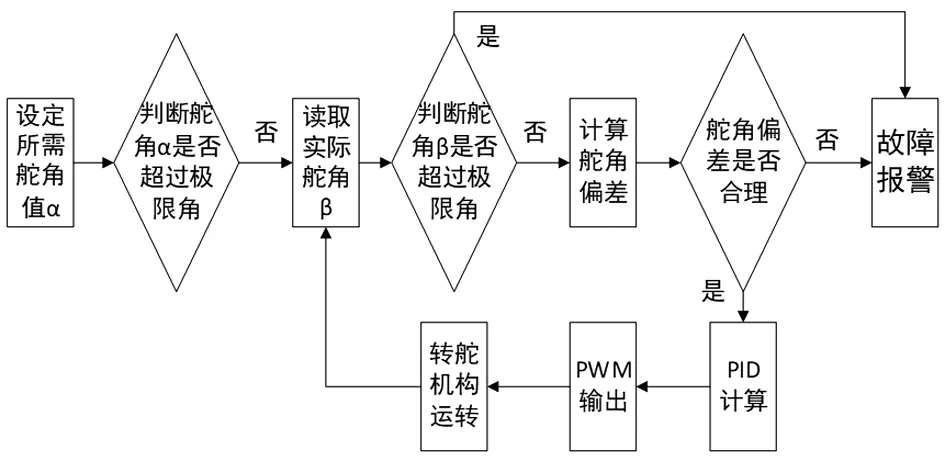
图2 转舵控制流程图
由上级程序设定舵角α,通过读取实际舵角β,来计算舵角偏差;当偏差合理时,进行PID计算,并由PLC发送对应脉冲,控制转舵机构运动,使舵角偏差趋向于零,实现转舵的精确控制。通过PID控制可以周期性调节喷水推进器的实际舵角,使之始终与设定舵角相符[2]。通过使用STEP 7中的PID_Compact指令进行PID算法控制,其算法表达式可简化为:
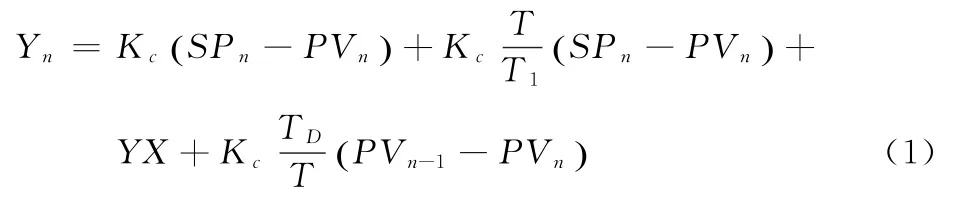
Yn采样时刻为n时,计算出的PWM控制量;Kc是控制过程的增益量;SPn是采样时刻为n时系统的给定值;PVn是在采样时刻为n时的过程变量;T是采样周期;TD是微分时间;T1是积分时间;YX是在采样时刻为(n-1)时的积分输出量[3][4]。
2.4 人机交互端模块
人机交互端模块是将PLC的数字信号转化为驾驶员可识别的视觉信号,并将驾驶员的指令转化为数字信号发送至PLC,主要分为显示和控制两部分。该模块的程序编写,需要构建显示面板,与PLC通讯,将系统运行情况、操作提时、舵角值、方向盘角度值、陆上转向器角度值、故障报警等进行显示;构建控制面板,便于驾驶员向PLC发送控制指令,如控制系统的工作模式,设定舵角值,打开或关闭电机等。
3 结语
本系统在某新型水陆两用车上试装后,运行效果良好,试验的数据如下:能实现一个方向盘操控水上转向与陆上转向,切换装置的切换时间为1s;电动转舵执行机构的转舵速度为每秒20°;实际舵角与显示舵角的误差不超过0.1°,正舵时无偏差。以上试验数据表明,该舵机控制系统满足了水陆两用车的使用需求,达到预期设计目标。该系统具有结构简单、占用空间小、转舵精度高的优点,且预留有数值化接口,为水陆两用车的智能化升级预留了空间,为水陆两用车无人驾驶技术提供了重要基础。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
模具制造(2019年10期)2020-01-06
电子制作(2018年1期)2018-04-04
航空模型(2016年5期)2016-07-25
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
航空模型(2015年6期)2015-10-21