
毫米波雷达在空调器上的应用研究
2021-11-09 11:17陈伟杰周浩陈妃味
家电科技 2021年5期
陈伟杰 周浩 陈妃味
TCL空调器(中山)有限公司 广东中山 528403
1 引言
近些年,随着科技的不断进步和社会的高速发展,人们对家电的需求已经不止于家电“原始功能”本身,而对家电的智能化功能有了更高的要求。空调器作为房屋不可缺少的家电之一,是智能化技术应用最深入的,但是仍处于真正意义上智能化的半成熟阶段。
采用各种传感器采集环境数据进而空调器执行相应的控制指令,是空调器智能化发展必不可少的手段。当前,也有个别空调器已搭载雷达传感器,来采集房间内人物的方位,从而实现“风朝向人吹”和“风避开人吹”的功能。然而,采集的环境数据要素少,实现的功能单一且效果并不明显。本文采用60 GHz毫米波雷达传感器,采集房间的面积、与墙夹角、空调器安装位置、目标人物位置以及睡眠状态等,为了提高空调器的智能化水平,增强毫米波雷达在空调器上的深度应用,特此开展毫米波雷达在空调器上的应用研究。
2 毫米波雷达技术背景
2.1 毫米波雷达
工作在毫米波波段的雷达。工作频率一般为30 GHz~300 GHz,波长为1 mm~10 mm,介于微波和厘米波之间,兼具有微波雷达和光电雷达的优点。
2.2 毫米波雷达工作原理
2.2.1 CW多普勒雷达传感器多普勒雷达是一种专门的雷达,使用多普勒效应原理,测量得出不同距离目标的的速度。它向给定的目标发射微波信号,然后分析反射回来的信号的频率变化,发射频率和反射回来的频率的差异,可以精确测量出目标相对于雷达的运动速度等信息[3]。
2.2.2 FMCW毫米波雷达传感器
发射波为调频连续波,其频率随时间按照三角波规律变化。雷达接收的回波的频率与发射的频率变化规律相同,都是三角波规律,只是有一个时间差,利用这个微小的时间差可计算出目标距离。
①测距:通过给目标连续发送毫米波信号,然后用传感器接收从物体返回的毫米波,通过探测毫米波的飞行(往返)时间来得到目标物距离;
②测速:根据多普勒效应,通过计算返回接收天线的雷达波的频率变化就可以得到目标相对于雷达的运动速度,简单地说就是相对速度正比于频率变化量;
③测角度:通过并列的接收天线收到同一目标反射的雷达波的相位差计算得到目标的方位角。
3 系统总体设计
3.1 实验平台介绍
基于60 GHz工业级毫米波雷达传感器,4发4收天线,工作频率60 GHz~64 GHz,可以同时测量距离、速度和方位角,实物如图1所示。

图1 毫米波雷达开发平台
主控板采用瑞萨RL78/G13系列16位单片机,主板提供5 V电源,用UART口与雷达模块通信获取雷达检测数据。
IDE使用瑞萨自主开发的CS+ for CA,仿真器使用瑞萨E2 lite仿真器。
3.2 程序软件设计
程序设计主要分为3个模块:串口数据收发模块、数据优化和处理模块、功能逻辑模块。
3.2.1 数据收发处理
主板发送部分(控制雷达启动),待雷达初始化完毕,主板发送开启雷达指令,待雷达扫描面积完毕后接着发送获取房间坐标信息指令,再发送开启雷达串口发送指令,则雷达开始主动发送追踪人物目标信息。
主板接收部分(接收雷达数据),雷达启动后,将雷达发送的帧数据进行解码,获取房间4个角落坐标信息;开启雷达串口发送后,解码获取雷达检测到的追踪目标数、目标坐标、目标高度、目标速度等信息存入相对应数据组保存。
数据优化和处理部分(处理雷达数据),由于毫米波雷达对静态目标的检测容易导致目标消失,而目标人物不会突然在一个点消失,在时间上和空间上具有关联性,因此需要优化数据,需要对每帧数据与上一帧数据进行比对,比对结果若是有目标消失,则判断该人员数据消失前是否仍在房间内,是则保留该数据信息,否则删除该目标数据。图2为优化“假消失”数据算法流程图。

图2 优化“假消失”数据算法流程图
对原始数据进行处理,根据雷达发送的房间角落坐标计算房间面积。因为房间形状的不确定性以及雷达放在不同位置有不同的坐标框架,因此采用海伦公式计算任意四边形的面积。
取房间4个角落X、Y坐标数据,利用两点间距离公式计算出4边长,设为a,b,c,d。房间面积为S,假设一个系数Z:

为了减少因为噪声干扰而导致数据波动较大,需要采用滑动窗口算法进行滤波优化,计算每个窗口数据的和,再取其平均值。经过滑窗滤波后,数据波动较小,避免了较大波动产生的误判。
3.2.2 空调器功能设计(睡眠识别功能为例)
毫米波雷达能够通过检测目标人物轮廓,根据机器学习判断是否为在床上躺卧和睡眠姿态,以及检测呼吸和心率状态等来检测睡眠状态。受限于空调器与目标人物的距离,毫米波雷达通过检测人体呼吸和心率状态来判断人体睡眠状态结果可靠性较低,因此采用检测人体是否在床上躺卧和睡眠姿态的方案来综合判断人物是否进入睡眠。
毫米波雷达开启检测后,当检测到目标人物后,计算人体高度数据以及轮廓模型,判断是否为在床上躺卧,进而再通过提前训练的睡姿模型分析人物是否为睡眠姿态,判断是否进入睡眠,从而开启空调器的智能睡眠模式。图3为睡眠功能逻辑流程图。
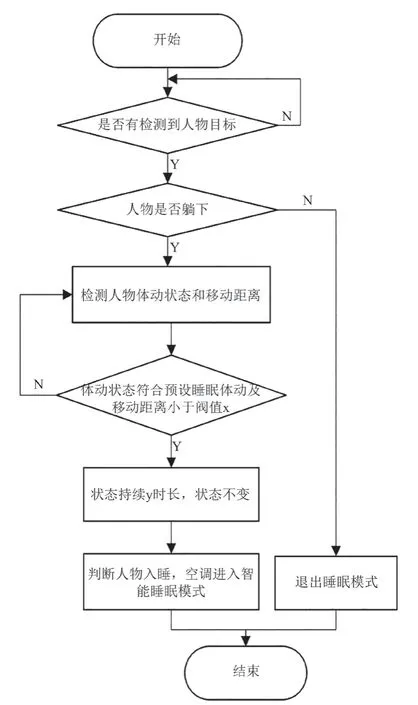
图3 睡眠功能逻辑流程图
4 实验与分析
测试环境:将毫米波雷达放在8 m×4.5 m会议室内测试,高度调整为1.45 m,分别放置在角落和短边进行测试采集数据。如图4所示。
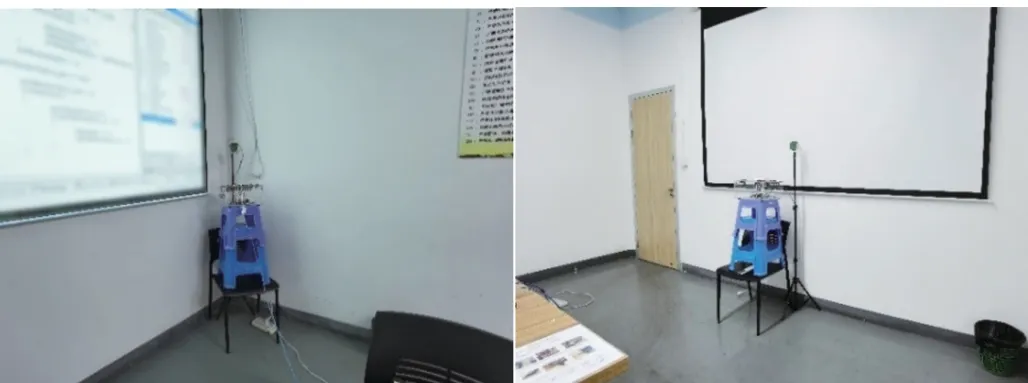
图4 毫米波雷达放置位置
如图5所示,雷达法线作为y轴(空调器正向,基准线),x轴与y轴垂直,形成房屋坐标系。为了保证采集数据的一般性和全面性,将会议室分区,各区共设置9个采集测试点,验证程序和毫米波雷达数据的准确性。
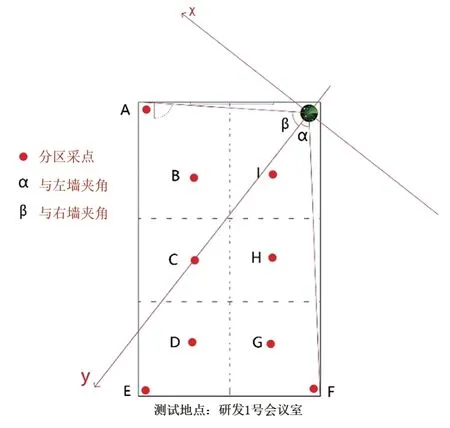
图5 房间分区点阵图
首先是房间数据,将雷达放置在角落和短边,各统计4次面积数据和左右夹角数据。数据结果如表1。
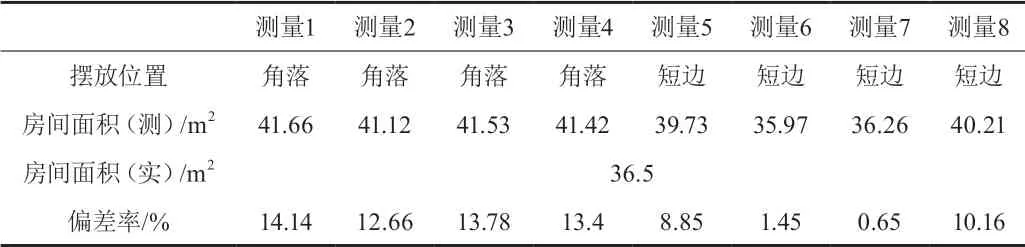
表1 雷达测量房屋面积数据表
数据分析:房间面积最大偏差率为14.14%,最小偏差率为0.65%,综合偏差率为9.34%,放在角落偏差率大于放在短边偏差率。对空调器而言,10%以内的偏差率认为合格。房间面积的检测可以为空调器自适应制冷量、制热量和送风量提供一个有力参考,降低功耗,减少电能浪费。根据用户调研,用户对空调器的能耗关注度较高,如何降低能耗,做到节能,是空调器企业思考的方向。采集房间面积的大小,可以根据不同房间大小为空调器自适应制冷量、制热量和送风量等提供一个重要参数,有效降低能耗损失。表2为雷达在角落测量空调器与左右墙夹角的数据表。

表2 雷达测量空调器左右夹角数据表
数据分析:雷达放置在角落,检测左右夹角,左夹角综合偏差率为3.47%,右夹角综合偏差率为2.21%,左右夹角综合偏差率为2.84%,数据可靠性高。左右夹角的检测可以让空调器左右导风板规避无用风,提高送风利用率。例如一些用户将挂式空调器紧靠墙壁安装,左右扫风会对墙吹;柜式空调器出风口朝向偏靠墙同样会对墙吹,产生大量无用风。表3、表4为检测的人物目标相对雷达的距离数据、角度数据。

表3 人物相对雷达的距离数据表

表4 人物相对雷达的角度数据表
表3数据分析:距离最大偏差率为6.45%,最小偏差率为0%,综合偏差率为2.01%,数据检测可靠性极高。如今流行的圆柱体空调器,出风口较低,儿童容易触及,门板在关闭时容易夹伤手,因此对人物与空调器的距离检测,可以在人物与空调器距离很近时停止门板和扫风板的动作,实现防夹手功能,提高空调器的安全性。
表4数据分析:角度最大偏差率为13%,最小偏差率为0%,综合偏差率为6.17%,检测数据可靠性高。检测人物角度数据,可以调整空调器左右扫风角度,实现“风吹人”“风避人”等功能,提高空调器的舒适性。
最后,测试识别人物睡眠功能的可靠性,本次测试仅测单人睡眠情景。人物在房间内左墙和右墙各躺下模拟睡眠50次,测试程序设置检测到躺下姿态,持续检测超过5秒后判断为进入睡眠状态。图6为模拟睡眠测试图。
测试过程中发现,当位于图6b)位置睡眠测试时,测试50次中,共有15次检测失败,成功率仅为70%,而位于图6a)位置睡眠测试时,成功47次,仅3次失败,成功率达94%。经分析,右墙反光写字板对雷达检测产生了干扰,产生的人物目标点云数据异常,因此检测失败。总体而言,在雷达不受干扰的情况下,睡眠识别功能可靠性高,可进一步研究应用于实际产品投入。

图6 人物模拟睡眠
5 结论
本文通过研究60 GHz毫米波雷达在空调器上的应用。根据毫米波雷达测距、测角度、测速度的功能特性,使空调器对环境感知能力进一步增强。通过对房间面积、空调器夹角的检测以及对人物的追踪,实现空调器更加智能化的制冷、制热、送风等。实验结果显示,面积检测偏差率低于10%,人物的距离偏差率为2.01%、角度偏差率为6.17%,数据可靠性高,可以作为空调器环境感知的数据重要参考。毫米波雷达在空调器领域还有更多可能性,下一步将作进一步地深入研究。
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
家电科技(2020年2期)2020-04-02
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
电子制作(2017年17期)2017-12-18
农村青少年科学探究(2017年6期)2017-09-11
广西电力(2016年5期)2016-07-10
系统医学(2016年8期)2016-02-20
