智能网联汽车中心式匝道合流协同控制
2021-11-10 02:34郭海霞
科学与生活 2021年12期
关键词:智能网联汽车
摘要:交通拥堵已成为城市发展的痛点问题,匝道合流是造成城市高架道路和高速公路交通拥堵的主要原因之一。2018年,以北京高峰时段出行为例,每出行1个小时,就有29.7分钟耗费在堵车上,按月平均工资8467元(北京市统计局发布2017年北京市職工月平均工资)计算,得出北京第三季度每月因拥堵造成的时间成本达1049元。交通拥堵降低了交通效率,增加了碰撞风险,增加了出行时间,给乘客带来不适,导致油耗和排放过多。实际上,匝道合流操作对于驾驶员来说,必须综合考虑周围环境的各类因素。通常,试图合流的车辆可能会在入口匝道上先减速,等待合适的合流机会,同时根据对安全间距和主流车辆速度的判断,以确定加速的程度和时间。即使驾驶员最终顺利完成合流,实际的合流过程也不一定是全局最优的,安全性、经济性和舒适性难以兼顾和保证。
关键词:智能网联汽车;匝道合流;协同控制;中心式方法;燃油经济性
引言
交织区是道路系统的重要组成部分,尤其山地城市受地形、地物等客观条件的限制,多条匝道并入主线形成多路合流交织区,极易引发交通事故。虽然分车道控制配合定向车道对这类交织区的安全性有了很大的提升,但研究发现在高峰期多路合流交织区的交通延误现象更为严峻。因此,优化多路合流交织区控制方法对降低交织区的车辆延误具有重要的意义。
1智能网联汽车的匝道合流协同控制
自适应控制的原则是通过感知交通数据,合理的改变各车道的相位相序和自适应信号配时来减少交织区的延误,保证交织区内车辆高效通行,从而避免各个车道发生溢流。主要包括:数据实时感知和分车道自适应控制,其中分车道自适应控制又分为进口车道相位相序优化、自适应配时、最小总延误3个模块。进行自适应协同控制时,当检测到各车道的交通流量和排队长度发生变化,根据各车道的约束条件重新组合相位相序,得到不同的分车道控制方案。再根据自适应相位绿时和信号周期,动态调整各方案的信号配时,最终得到最优的组合方案。当检测到放行的各车道相位相序不变时,根据各车道的交通量和排队长度判断是否进行信号配时,是否得到最小延误,否则返回车辆检测。
2研究场景
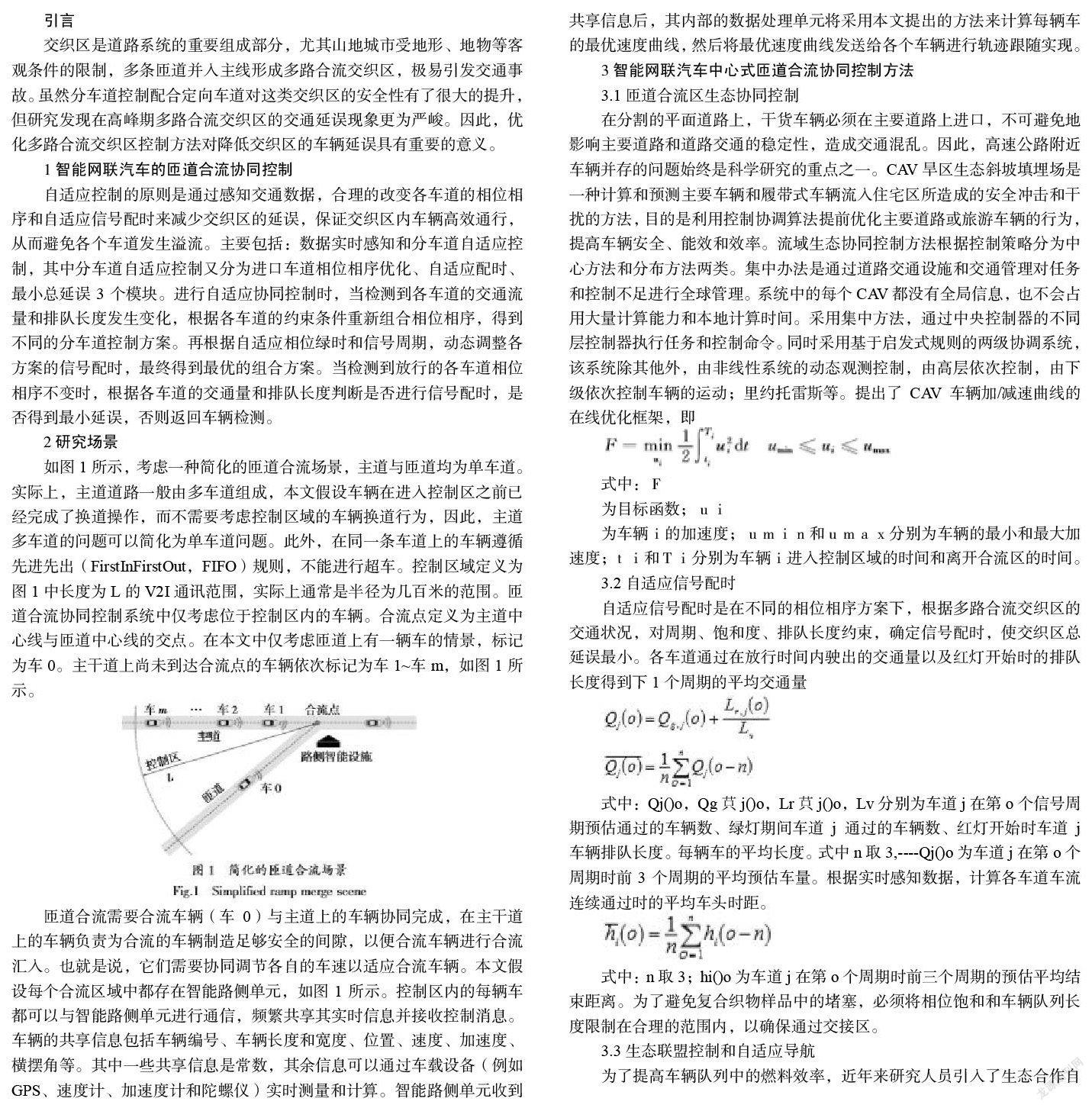
如图1所示,考虑一种简化的匝道合流场景,主道与匝道均为单车道。实际上,主道道路一般由多车道组成,本文假设车辆在进入控制区之前已经完成了换道操作,而不需要考虑控制区域的车辆换道行为,因此,主道多车道的问题可以简化为单车道问题。此外,在同一条车道上的车辆遵循先进先出(FirstInFirstOut,FIFO)规则,不能进行超车。控制区域定义为图1中长度为L的V2I通讯范围,实际上通常是半径为几百米的范围。匝道合流协同控制系统中仅考虑位于控制区内的车辆。合流点定义为主道中心线与匝道中心线的交点。在本文中仅考虑匝道上有一辆车的情景,标记为车0。主干道上尚未到达合流点的车辆依次标记为车1~车m,如图1所示。
匝道合流需要合流车辆(车0)与主道上的车辆协同完成,在主干道上的车辆负责为合流的车辆制造足够安全的间隙,以便合流车辆进行合流汇入。也就是说,它们需要协同调节各自的车速以适应合流车辆。本文假设每个合流区域中都存在智能路侧单元,如图1所示。控制区内的每辆车都可以与智能路侧单元进行通信,频繁共享其实时信息并接收控制消息。车辆的共享信息包括车辆编号、车辆长度和宽度、位置、速度、加速度、横摆角等。其中一些共享信息是常数,其余信息可以通过车载设备(例如GPS、速度计、加速度计和陀螺仪)实时测量和计算。智能路侧单元收到共享信息后,其内部的数据处理单元将采用本文提出的方法来计算每辆车的最优速度曲线,然后将最优速度曲线发送给各个车辆进行轨迹跟随实现。
3智能网联汽车中心式匝道合流协同控制方法
3.1匝道合流区生态协同控制
在分割的平面道路上,干货车辆必须在主要道路上进口,不可避免地影响主要道路和道路交通的稳定性,造成交通混乱。因此,高速公路附近车辆并存的问题始终是科学研究的重点之一。CAV旱区生态斜坡填埋场是一种计算和预测主要车辆和履带式车辆流入住宅区所造成的安全冲击和干扰的方法,目的是利用控制协调算法提前优化主要道路或旅游车辆的行为,提高车辆安全、能效和效率。流域生态协同控制方法根据控制策略分为中心方法和分布方法两类。集中办法是通过道路交通设施和交通管理对任务和控制不足进行全球管理。系统中的每个CAV都没有全局信息,也不会占用大量计算能力和本地计算时间。采用集中方法,通过中央控制器的不同层控制器执行任务和控制命令。同时采用基于启发式规则的两级协调系统,该系统除其他外,由非线性系统的动态观测控制,由高层依次控制,由下级依次控制车辆的运动;里约托雷斯等。提出了CAV车辆加/减速曲线的在线优化框架,即
结束语
本文提出了基于智能网联汽车的中心式匝道合流协同控制方法,建立了匝道合流协同控制模型,通过数值仿真验证了所提出方法的有效性。仿真结果表明,本文所提出方法与文献[6]中方法具有基本相同的合流效率,但可有效提升协同合流控制中的车辆燃油经济性。本文所研究的合流问题中,车辆与路侧智能设施之间仅在初始时刻进行短暂通信,在后续研究中可增加对规划后车辆动力学控制的研究,增加合流过程中的通信影响,对通信时延、丢包作为重要因素进行建模分析。不同的匝道结构参数对车辆动力学控制的影响较大,尤其是横向动力学控制,因此在后续研究中可考虑不同匝道结构参数的影响。此外,今后的研究也将集中在更复杂场景下的合流控制问题上,比如匝道上车辆数目增多、主干道上车道数量增加并允许换道等。
参考文献
[1]杨晓芳,范柏桐,付强,基于车车通信的快速路入口匝道车速控制研究[J].交通运输研究,2019,5(06):69-76.
[2]王立业,城市快速路进口附近区域交通组织与控制方法[J].四川警察学院学报,2019,31(06):115-119.
[3]苏昌辉,复杂环境下连接匝道下穿既有快速路爆破设计与研究[C].中国建设科技集团股份有限公司、中国建筑学会工程总承包专业委员会、中国中建设计集团有限公司、亚太建设科技信息研究院有限公司.第二届工程总承包项目管理经验交流会暨2019中国建筑学会工程总承包专业委员会年会论文集.中国建设科技集团股份有限公司、中国建筑学会工程总承包专业委员会、中国中建设计集团有限公司、亚太建设科技信息研究院有限公司:施工技术编辑部,2019:114-117.
[4]谢济铭,彭博,张媛媛,唐聚,蔡晓禹,城市快速路交织区控制策略研究现状与展望[C].中国智能交通协会.第十四届中国智能交通年会论文集(2).中国智能交通协会:中国智能交通协会,2019:318-330.
[5]刘伟铭,陈纲梅,林观荣,李静宁,高速公路收费站与衔接信号交叉口协调控制研究[J].广西师范大学学报(自然科学版),2019,37(04):16-26.
[6]邹祥莉,徐建闽,于洁涵,林观荣,基于分层递阶结构和S模型预测控制的快速路多匝道协同控制模型研究[J].公路工程,2019,44(05):105-109+ 161.
[7]黄灿锐,基于微观仿真的匝道管控方案思路研究[C].中国城市规划学会城市交通规划学术委员会.品质交通与协同共治——2019年中国城市交通规划年会论文集.中国城市规划学会城市交通规划学术委员会:中国城市规划设计研究院城市交通专业研究院,2019:2973-2984.
作者简介
郭海霞,女,民族汉,本科,讲师,无锡南洋职业技术学院。
猜你喜欢
计算机时代(2019年10期)2019-11-11
计算机应用(2019年4期)2019-08-01
中小企业管理与科技·上旬刊(2019年6期)2019-07-20
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
移动通信(2019年3期)2019-06-27
移动通信(2019年4期)2019-06-25
商情(2018年25期)2018-07-08
当代经济管理(2018年5期)2018-05-25
科技视界(2017年29期)2018-01-18