
城市信号交叉口交通控制优化研究
2021-11-10 14:12王娇
科技信息·学术版 2021年23期
摘要:信号交叉口是城市道路网中重要节点,对城市信号交叉口进行交通控制优化研究可以有效改善交通。本文通过实地调查,针对不同交叉口进行优化设计,利用VISSIM软件仿真评价。对重庆某道路4个交叉口改善优化设计。结果表明:1号交叉口的车道功能改变,3号交叉口的右转提前设置以及优化配时设计能降低车辆延误时间,提高整个交通网络通畅性。
关键词:信号交叉口;信号配时;车辆延误;VISSIM仿真
引言
随着城市交通问题日益突出,城市交叉口信号配时及渠化的不合理易引起交通问题。较多学者对城市信号交叉口的优化进行了研究,主要有交叉口信号配时设计及渠化优化设计两类。申鑫泽等[1]对混合交通流环境下信号交叉口进行时空分离及优化设计,有效减少信号周期、排队长度及车辆延误时间;许翔华等[2]通过感应绿波控制,从进口道渠化及信号配时优化交叉口存在的问题,解决交叉口拥堵问题;戴静[3]对信号交叉口综合待行区设置形式、条件及交通控制方式进行优化仿真研究,在一定程度上缓解交叉口的通行压力。
1工程现状
1.1现状交通流
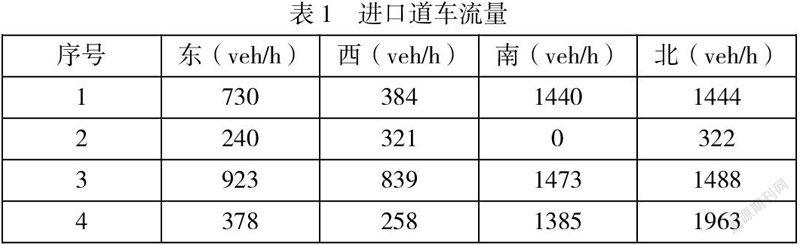
通过实地调查区域四个主要的交叉口,包括环形交叉口、十字交叉口、上下交叉口,除此之外,路段中还存在让行信号控制地点,交叉口和信号控制地点都形成了交叉口瓶颈地段,全长2.2公里左右,本文取得不同交叉口进口道车流量。
1.2现状配时
(1)1号交叉口
该信号配时采用的是四相位,周期112秒,其中南北直行右转为第一个相位,南北左转为第二个相位,东西直行加右转为第三个相位,东西左转为第四个相位。
(2)2号交叉口
该交叉口为三路交叉,共有六个相位,周期78 秒,第一相位为西直行,第二相位为东直行,第三相位为东左转,第四相位为西右转,第五相位为北左转,第六相位为北右转,北调头车辆无需信号控制,因交叉口的交通量较小,渠化也较完善,所以信号配时周期较短。
(3)3号交叉口
该信号配时方案采用的是早期迟断式信号控制设计,第一相位为东右转直行,第二相位为东左转,第三相位为西直行右转,第四相位为西左转,第五相位为南直行右转,第六相位为南左转直行右转,第七相位为北右转直行,第八相位为北左转,四个进口道均设左转保护相位,左转相位均与本进口道直行车辆保持一致。
(4)4号交叉口
该交叉口为环形交叉口,无信号配时。
2交通控制优化设计
2.1渠化优化设计
本文1号交叉口和3号交叉口进行了渠化优化设计。其中1号交叉口将东口道路的左转车道、右转车道和直行右转车道渠化为东口道路为左转车道、直行右转车道;西口道路为左转车道、右转车道和直行右转车道渠化为直行车道和两条直行右转车道。其中3号交叉口将每个方向进口道的右转车道提前设置,右转的车辆提前通过,不影响直行车辆,降低通行时间。
2.2信号配时优化设计
对渠化后的1、2号交叉口信号配时设计。其中1号交叉口采用四个相位,周期120秒,其中南北直行右转为第一个相位,南北左转为第二个相位,西进口直行加右转为第三个相位,东左转、直行和右转为第四个相位;2号交叉口为六个相位,周期145秒,第一相位为西左转,第二相位为东左转,第三相位为东右转加直行,第四相位为西右转加直行,第五相位为北左转和南左转,第六相位为北右转直行和南右转直行。
3交叉口VISSIM仿真
利用VISSIM仿真软件输入车流量、车型比例,设置不同车道功能,输入行人参数,设置冲突点等,尽量与实际交通运行一致。改善后的四个交叉口的VISSIM仿真结果表明 4个交叉口的交通问题得到了有效的改善,延误时间减少,服务水平得到了提高。其中,1号交叉口的延误时间由39.6s减少到16.5s,服务水平由D提高到B;2号交叉口延误时间由2.2s缩短至1.8s,3号交叉口延误时间由29.1s缩短至7.4s,服务水平由C提高至A,4号交叉口延误时间由39.3s缩短至30s,服务水平由D提高至C。
4结论
本文通过渠化和信号配时优化设计对多个交叉口进行改善,利用VISSIM軟件仿真优化前后交通运行情况。对不同交叉口进口道进行车道流向改变,改变车道原有功能,以及对右转和直行车道进行右转车辆提前设计,结合信号配时优化设计,可以有效降低该道路交叉口车辆延误时间,提高道路服务水平。
参考文献
[1]申鑫泽,方筱睿,李昆.混合交通环境下信号交叉口的优化设计[J].河南科技,2020(20):122-124.
[2]许翔华,杨希锐,曲大义,王进展,曹俊业,万孟飞.基于感应控制的信号交叉口交通组织优化设计及仿真[J].青岛理工大学学报,2016,37(05):120-125.
[3]戴静.基于仿真技术的信号交叉口综合待行区设置分析[J].交通与运输,2021,37(02):12-15.
作者简介:王娇(1997年10月-),女,汉族,重庆长寿人,硕士研究生在读,研究方向:道路交通规划与管理、网联自动驾驶车辆控制。
