利用无人机倾斜摄影测量进行三维地籍测量
2021-11-16 14:30张晶晶刘伟东郝卓娅郝冬冬包兴汹
北京测绘 2021年10期
张晶晶 刘伟东 郝卓娅 郝冬冬 包兴汹
(1. 自然资源部第一大地测量队, 陕西 西安 710054; 2. 陕西随创互联科技有限公司,陕西 宝鸡 721000; 3. 杭州九尚科技有限公司, 浙江 杭州 310000)
0 引言
目前,许多研究学者在提高三维模型精度方面做了很多研究[1],并将其应用于各行各业。丁波[2]分别以四角单点及组点布设、区域网周边均匀布设、四角点组区域网周边均匀布设、区域网均匀布设、区域网均匀布设四角点组布设等6种控制点参与空三解算,分析不同控制点布设方法对模型精度的影响。王云川等[3]通过灰度拉伸及直方图均衡化方法进行影像匀光处理,实验结果表明,该方法能够使得三维模型的纹理细节更显著,色调更均匀,完整性更强。原明超等[4]、张雪莲[5]、马廷超[6]、李鑫龙等[7]将无人机倾斜摄影测量技术应用于大比例尺地形图中。郑史芳等[8]将其应用于地质灾害检测中,结果表明,该技术可以减少人工实地勘察的工作量,提高工作效率,为地质灾害隐患点预警提供有力的依据。柯生学[9]、解文武[10]、赵波等[11]将其应用于矿山测量及矿山地质数据分类系统中。
本文将无人机倾斜摄影测量技术应用于农村地籍测量中,描述了三种倾斜影像空中三角测量的方法。通过在安徽省阜阳市某村的3个三维模型上获取的20个同名界址点的精度,验证了无人机倾斜摄影测量技术在地籍测量中的可行性。
1 无人机倾斜摄影测量进行地籍测量的技术方法
本文将无人机倾斜摄影测量技术应用于地籍测量的方法可分为三个步骤:像控点测量与倾斜影像采集,实景三维模型构建,内业地籍数据采集。技术流程如图1所示。

图1 利用无人机倾斜摄影技术进行地籍测量的流程图
1.1 像控点测量及倾斜影像采集
无人机倾斜摄影技术是在无人机上搭载多台不同角度的航摄仪,通过全球卫星导航系统(Global Positioning System,GPS)/惯性导航系统(Inertial Navigation System,INS)获得相机拍摄瞬间的位置与姿态。影像采集前需设定好航高、航飞路线、影像重叠度(通常,航向重叠度为80%,旁向重叠度为60%)等参数。航飞过程中,在建筑物密集区,为减少建筑物遮挡导致后续三维模型中建筑物粘连的情况[12],航向重叠度可达到90%。
像片控制点测量是根据技术要求提前在地面布设地标点,使用RTK技术得到地标点的坐标,其将参与空中三角测量解算[13]。因此,控制点的质量直接影响到三维模型及测图的精度。高质量的像控点的测量需要注意以下2点:(1)应结合整个测区情况均匀布设在没有遮挡物的空旷地面上,并尽量满足6度重叠;(2)测量时,要对同一个点进行3次测量,取平均值作为测量结果。
1.2 构建实景三维模型
利用Smart3d软件构建实景三维模型的过程可以分为5个部分[14]:倾斜影像空三加密、多视影像密集匹配、格网构建、三维白膜构建、纹理映射及修膜。其中最为关键的一步是空中三角测量,其结果直接影响模型的精度。
本文采用以下两种方法提高倾斜影像空中三角测量的精度:(1)首先将不同角度的相机影像分为不同块,分别进行空三处理;然后合并所有块并编辑;最后再次进行空三处理。(2)先整体进行一次空三处理,将空三结果导出,用其更新影像的位置与姿态(Position and Orientation System,POS)数据,重新进行空三处理(本文称该方法为“再空三法”)。
1.3 内业地籍数据采集
EPS三维测图软件可以将已有的实景三维模型成果(osgb格式)转换为内部使用的.dsm格式并导入,在二三维联动的状态下进行地物采集,获取矢量数据。如通过五点房交会法或线划法绘制房屋,并录入房屋的楼层数、结构等属性信息。在内业编辑过程中,对于三维模型中地物变形、无法判读或判读不准确、地形复杂的区域,以及属性信息不明确的地籍要素做好记录,需进行外业补测及实地调绘。
2 实验与结果分析
2.1 实验概况与结果
本文以安徽省某村庄的地籍调查项目为例,研究无人机倾斜摄影测量技术在地籍测量中的应用,并验证成果精度,讨论提高模型精度的方法。针对实验区的面积(约140 000 m2)、地形情况及房屋结构,项目航高设为100 m,航向重叠度为80%,旁向重叠度为60%,航线弯曲度不大于 3%,均匀布设35个控制点。项目利用RTK技术获取控制点的平面与高程坐标,使用红鹏小金牛无人机进行倾斜影像采集,共拍摄3 740张影像。
得到倾斜影像后,利用Smart3d软件通过倾斜影像空三加密、多视影像密集匹配等步骤建立实景三维模型。为验证本文所述提高模型精度的方法,项目进行了3次空三加密:(1)将所有原始影像作为一个整体,进行空三解算;(2)将每个相机的像片即地物的不同视角影像分别作为区块,单独进行空三解算,然后合并所有区块并运用区域网平差模型进行解算;(3)利用(1)得到的空三结果,更新影像的POS数据,再次建立工程进行空三处理(再空三法)。利用三次加密得到的结果,分别进行密集匹配等过程构建模型,如图2所示。

图2 三维模型成果图
利用EPS测图软件进行三维测图,并经过外业核实调查,对内业采集数据进行补充完善,最终成果图如图3所示,图中“李佰稳”为宗地权利人姓名;“混”表示房屋为1层混合建筑;110.8 m2表示宗地面积;J1、J2…J6表示界址点编号;14.72 m等表示两个界址点之间的距离;072表示农村宅基地;JC00165表示宗地编号。

图3 实验区三维采集数据局部图
检测界址点精度是评定地籍图质量的重要步骤,本文均匀选取实验区中20个界址点作为检测点,分别统计其内业采集点的坐标与外业测量点坐标的误差。为验证本文所述提高模型精度的办法,分别将三次空三得到的模型表示为模型1、模型2及模型3,检测点的误差统计结果如表1所示,其中ΔSm1、ΔSm2、ΔSm3分别表示选择的20个界址点在三个模型上的中误差,单位为m。《地籍调查规程》(TD/T 1001—2012)中对1∶500比例尺地籍图界址点的精度要求如表2所示。图4为检测点在不同模型上的误差分布图。

表1 基于倾斜摄影测量技术的1∶500地籍图平面精度检测表 单位:m
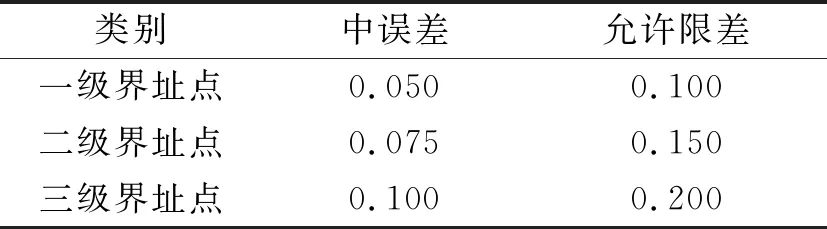
表2 界址点精度 单位:m

图4 检测点在不同模型上的误差分布图
2.2 实验结果分析
从表1中可知,模型1中检测点满足《地籍调查规程》中一级界址点精度的有10个,满足二级精度的有10个;模型2中检测点满足一级精度的有14个,满足二级精度的有6个;模型3中检测点满足一级界址点精度的有17个,满足二级精度的有3个。由此可知,使用三种空三处理的方法,皆可满足1∶500比例尺地籍测图的二级精度要求。但模型3中,满足一级精度的检测点数量明显增多,表明使用再空三法能够提升三维模型的精度,进而提高三维测图数据的精度。
由图4可知,模型1中检测点中误差最大的为0.078 m,最小的为0.023 m;模型2中检测点中误差最大的为0.067 m,最小的为0.026 m;模型3中检测点中误差最大的为0.066 m,最小的为0.023 m。表明模型1和模型2中检测点的精度虽都满足二级精度要求,但起伏较大,说明三维模型精度的稳定性相对较差。模型3中检测点精度起伏较小,表明三维模型精度较平稳,进而表明使用再空三法提高了三维模型精度的稳定性。这是因为再空三法使用第一次空三处理的结果更新了影像的POS数据,等同于将影像的位姿信息进行一次优化,使得影像的位姿信息更接近于正确值,则使用优化后的数据进行空三加密处理,会在一定程度上提高处理精度。
3 结束语
本文研究了利用无人机倾斜摄影测量进行地籍测量的技术,描述了三种倾斜影像空三处理的方法。以安徽省某村为例,利用红鹏小金牛无人机获取实验区3 740张倾斜影像,用Smart3d软件构建实景三维模型,运用EPS测图软件采集内业数据。均匀选取20个界址点作为检测点,评定测图精度。结果表明,三种空三处理方法都能够满足《地籍调查规程》中二级界址点的精度要求。其中,再空三法满足一级界址点精度的数量增多,表明该方法能够在一定程度上提高倾斜影像空三处理的精度,进而提高实景三维模型的精度与稳定性。进行一次倾斜影像的空三处理需要花费较多时间,所以本文建议,在初次空三处理不理想的情况下,可以使用再空三方法,以免耽搁项目的进度,增加成本。
猜你喜欢
现代苏州(2022年9期)2022-05-26
文萃报·周五版(2022年9期)2022-03-11
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
科技风(2019年8期)2019-10-21
科学与财富(2018年28期)2018-11-16
科技与创新(2016年22期)2017-03-30
汽车之友(2016年15期)2016-08-23
卷宗(2015年1期)2015-07-10