
基于LFM信号的风轮机叶片回波模型与分析
2021-11-17 07:08胡旭超谭贤四曲智国
计算机仿真 2021年2期
胡旭超,谭贤四,曲智国,独 林
(空军预警学院,湖北 武汉 430014)
1 引言
近些年来,世界各国对风电产业的投资日益扩大,全球风力发电累计装机容量呈上升趋势[1]。风电场的大范围建设,会对空管监视、气象观测等雷达设备产生严重的影响[2-6]。当雷达波束照射到风轮机叶片上时,风轮机叶片旋转产生微多普勒现象,因此风轮机叶片回波被当做一种动态杂波(Wind Turbine Clutter,WTC)。这些杂波与一些目标信号具有相似性,不仅会造成虚警问题,还可能干扰或者掩盖目标信号,产生掩蔽和阴影效应,造成雷达系统的探测盲区。另外,风轮机杂波还会导致目标检测概率和跟踪率的下降。而空管雷达是空管系统中监视空中目标飞行情况的重要信息源,是确保飞行安全的基础[7]。因此,风电场的大力发展与空管雷达的正常使用之间存在着巨大的矛盾。
目前,各国都在积极研究风电场的检测问题和风电场杂波抑制问题。通过对风电场回波信号进行建模,可以为风轮机检测问题和杂波抑制问题的研究提供相应的理论依据。在文献[8]中,提出了一种基于气象雷达的风轮机散射信号模型,但是没有考虑风轮机叶片的散射变化特性;文献[9]利用XGtd®软件来模拟风轮机回波散射特性,但需要先对风轮机进行3D建模,运算量大且步骤繁琐;文献[10]提出了基于脉冲多普勒雷达的回波模型,但其RCS模型存在严格的限定条件;文献[11]提出了一种基于单载频脉冲信号的风轮机回波模型,但单载频信号多普勒容差较小,在实际应用中受到一定的局限性。
本文根据空管雷达实际工程应用,提出了一种基于线性调频脉冲压缩信号的风轮机回波模型。该模型将风轮机等效为若干独立小散射体,并通过散射点叠加原理构造叶片回波模型。利用该模型具体分析了风轮机回波信号在时域、频域以及时频域的信号特征,最后根据本文所提模型研究了风轮机回波在信号处理过程中对雷达的影响。
2 WTB信号回波模型
风轮机主要由风轮机叶片(WTB)、桅杆、引擎舱三部分组成。其中桅杆和引擎舱看作是静止目标,本文不作具体研究。而叶片在风力的作用下产生旋转运动,且不同位置的散射点运动速度不同,造成风轮机各散射点的回波信号相位是一个随旋转变化的量,因此还需要对各散射点信号相位进行分析。
2.1 点散射信号模型
现阶段,空管雷达多为线性调频体制,因此假设发射的LFM信号表达式为

(1)
其中,TP为脉冲宽度,fc为载频,k为调频率。
则雷达接收到的去载频后回波信号可表示为

(2)

根据“走—停”模型,在LFM信号一个脉冲周期内,可忽略掉其距离变化[14],即
r(t)≈r(tm)=r(mTP)
(3)
因此根据点散射叠加理论,WTB的回波可表示为

(4)
其中N为叶片数,M为单个叶片上的散射点数,σn,i为第n个叶片上第i个散射点的RCS,rn,i(tm)为第n个叶片上第i个散射点到雷达的距离。
LFM信号增大了信号脉冲长度,但是降低了雷达的距离分辨力。对回波信号使用脉冲压缩技术可以提高回波的距离分辨力。设参考信号sref(t)=rect(t/TP)exp(jπkt2),则脉冲压缩后信号可表示为

(5)
由式(5)可以看出,rn.i(tm)决定了回波信号的相位的变化,辛格函数项sinc(·)确定了散射点的距离。由于叶片的旋转,回波的相位随着时间和散射点位置而发生变化。因此为了达到对风轮机回波的精准建模,需要考虑回波的相位随时间和位置的变化建立相应的相位模型。
2.2 信号相位
r(tm)决定了信号的相位,由于叶片的旋转,不同叶片散射点在不同时刻的r(tm)都在发生变化。以叶片旋转中心为原心,以垂直于叶片旋转面的方向为x轴,建立如图1所示的叶片和雷达之间的几何模型。其中α为雷达波束方位角,β为雷达波束俯仰角,θ为叶片旋转角,φ为雷达波束与叶片轴线间的夹角。

图1 叶片几何模型
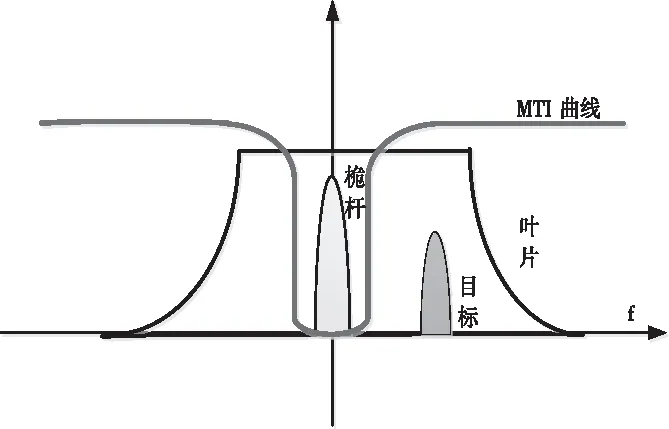
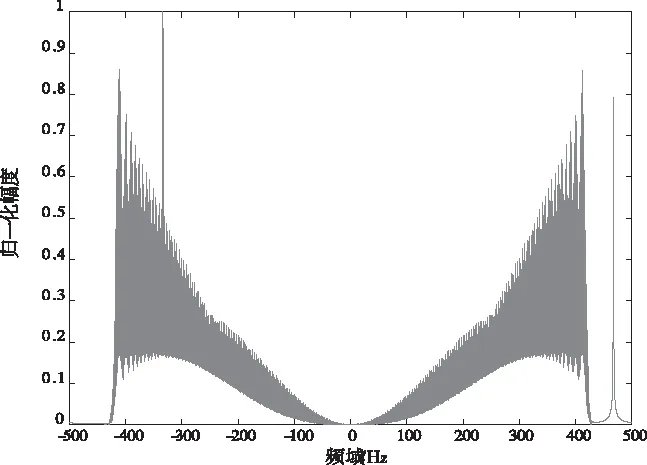
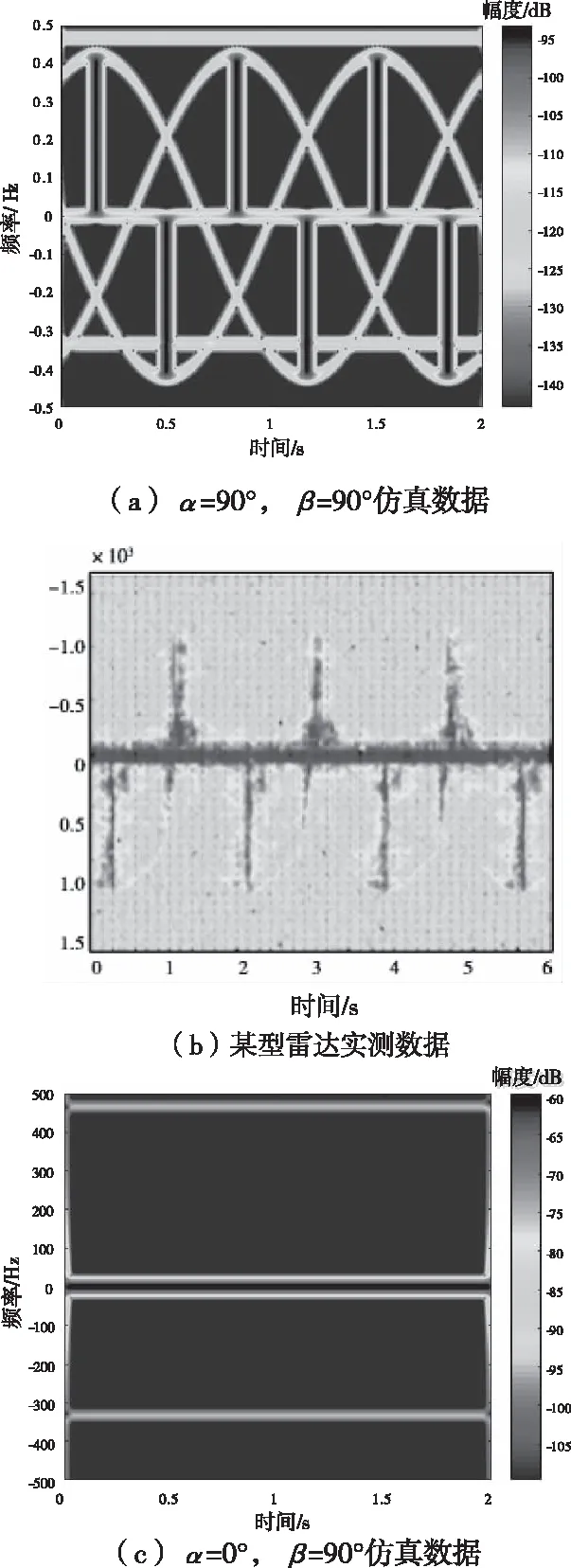
由于li< ≈R-licosφ(tm) (6) 根据空间几何知识,雷达波束与叶片轴线间的夹角可表示为[15] cosφ(tm)=sinβsinαcosθ(tm)+cosβsinθ(tm) (7) 其中,θ(tm)=θ0+2kπ/N+Ωtm,θ0为叶片初始旋转角,Ω为叶片旋转角速度。 由式(7)看出rn,i(tm)是li和tm的函数。由于叶片的旋转,对于叶片上某一点,其距离雷达的距离服从正弦函数变化。 由此,可以完整的得到风轮机叶片回波的信号模型,这对研究风轮机回波对雷达探测影响的研究具有重要意义。 第2节已经详细给出了风轮机回波信号模型,根据该模型可以分析风轮机叶片回波时域、频域以及时频域特征,并进一步研究其对雷达的影响。 由式(5)可知风轮机叶片时域表达式,对于空管雷达而言,其距离分辨力一般在几百米,远大于叶片长度,且LFM信号对多普勒移动具有不敏感的特点,因此叶片转动所造成的距离走动可以忽略不计,则辛格函数项中的rn.i(tm)≈R。当散射点间间隔d趋于无穷小时,则式(5)可近似为 (8) 当且仅当风轮机叶片与雷达视线垂直时,即cosφ(tm)=0,脉冲信号幅度达到所有脉冲中的最大值,这是由于风轮机叶片与雷达视线垂直时,各散射点回波相干叠加达到最大值,这被称作 “闪烁效应”,该时刻成为闪烁时刻。闪烁的间隔与叶片的旋转速度有关,叶片旋转速度与闪烁次数之间成正比关系。由式(7)(8)可知闪烁的持续时间与叶片长度、波长、角度和叶片旋转速度有关。当α=0°,β=90°时,雷达波束垂直于叶片旋转平面,此时cosφ(tm)恒为零,脉冲间信号幅度不随慢时间tm变化,此时脉冲间信号幅度不受调制,闪烁效应消失。 由式(5)(6)可以得到风轮机叶片单个散射点的多普勒相位为 (9) 由式(9)可以得到散射点的多普勒相位呈现余弦变化形式,变化周期与叶片旋转周期保持一致。则叶片散射点的多普勒频率为 (10) 由式(10)可以得到,叶片散射点的多普勒受正弦函数调制,且正弦周期与风轮机旋转周期保持一致[17]。对于同一叶片不同位置散射点具有相同的初相,频率的不同是由li造成;而不同叶片间的散射点的初相不相同。同时,当|sinφ(t)|=1且li=L时,达到风轮机瞬时多普勒频率达到最大值, 此时 (11) 因此可以得出叶片的多普勒频率在频率区间[-fd-max,fd-max]变化。同时,由式(8)可知散射点叠加的整个叶片的时域表达式,根据傅里叶变换可知: (12) 因此,对于叶片回波信号,其频域为rect(f)的矩形包络形式,矩形包络的范围在[-fdmax,fdmax]之间,即风轮机叶片会产生一个矩形频带,产生频率“集聚效应”。假设β=90°,α=90°,fr=1000Hz,则fdmax=280Hz,叶片回波频域特性如图2所示,风轮机叶片回波产生在[-280Hz,280Hz]之间的矩形频带。 图2 风轮机回波频谱图 频域滤波是常用的目标分离、抑制杂波等的手段,由于风轮机叶片回波会产生一个频带,频带越宽,越可能导致掩盖目标频率信息,且对于MTI滤波器而言,由于将会导致MTI滤波器组无法完全滤除叶片旋转频率,如图3所示,因此该方法无法对风轮机叶片杂波实现有效抑制。 图3 风轮机回波MTI示意图 根据3.1、3.2小节分析可知,风轮机叶片在时域由于相干叠加产生“闪烁效应”,存在信号强度会大于目标信号的问题。而在频域又集聚为一个较宽的频带,存在掩盖目标频率信息的问题,因此很难单独在时域或者频域对其进行分析抑制。但由式(10)可知,风轮机叶片的频率是时间的正弦函数,因此可以通过短时傅里叶变换(STFT)对对风轮机回波进行时频域研究,其原理如图4所示。 图4 短时间傅里叶变化 STFT通过滑动时间窗对信号进行依次傅里叶变换。如图4所示,时间窗滑动到以闪烁为中心的信号时,回波信号显示为一个相对完整的辛格峰值包络形式,根据式(12)变换关系,此时该段信号的频域为矩形包络rect(f)形式,即闪烁时刻在时频域上产生一条频率带。其中,当叶片向靠近雷达方向旋转时,频率带范围为[0,fdmax],而当叶片向远离雷达方向旋转时,频率带范围为[-fdmax,0],因此风轮机叶片在时域闪烁时刻其时频域也存在“闪烁效应”。而当滑动时间窗在非闪烁时刻时,由于不存在闪烁时刻的叠加效应,回波主要是由叶尖、叶片旋转中心的散射点的强电磁散射回波组成,因此在这些时刻的微多普勒特征主要变现为由叶尖引起的正弦曲线包络形式和旋转中心散射点引起的零频带。由于风轮机杂波在时频域存在以上时频特征,而一般目标不具备该特征,因此存在将风轮机杂波与目标在时频域分离以达到杂波抑制的可能性。 利用本文所提出的风轮机叶片信号回波模型,仿真参数如表1。假设信号在传播过程中不考虑损失,且不受地球曲率影响,目标1和目标2在风轮机周围区域。 表1 仿真参数 当α=90°,β=90°时,回波建模仿真如图5所示。图5(a)为所有脉冲回波信号,其中大图中每条竖线实为一个脉冲回波,放大后为一个辛格函数波形,如图5(a)中小图所示;图5(b)为回波信号按脉冲号折叠后二维结构,x轴每一列代表一个脉冲,y轴代表距离,z轴代表回波幅度;图5(c)为风轮机所在距离单元各脉冲回波幅度。 图5 风轮机回波信号时域特征 由图5(a)可验证了不同脉冲间的信号幅度受到辛格函数调制,不同脉冲间的信号幅度构成一个大辛格函数,而每个脉冲的回波为辛格函数图形,即每个脉冲间的小辛格图形受调制组成观测时间内的大辛格图形。从图5(b)可知,在该仿真窄带条件下,风轮机叶片回波信号脉压后均在相同距离单元20km内,由叶片转动造成的距离走动不超过一个距离单元,因此被忽略不计。进一步,由图5(c)可看出当叶片与雷达视线LOS垂直时,该脉冲回波幅度达到最大值,风轮机叶片信号在时域的“闪烁”特征。由于叶片转速为1/3转/每秒,当观察时间为3秒时,三个叶片与雷达视线存在6次垂直的情况,因此回波信号“闪烁”6次。同时通过仿真也可以看出在时域无法区分目标和风轮机杂波。 图6为风轮机回波信号频域特征。可以看出,叶片回波信号在[-418Hz,418Hz]之间产生了一条矩形频带。目标1频率折叠后为333Hz,其频率被风轮机叶片频率淹没,目标2频率为467Hz,其在叶片产生的频带之外。整个频带占风轮机脉冲重复频率的83.6%,已经影响到对目标在频域的探测。 图6 风轮机回波信号频域特征 对仿真回波做三脉冲对消MTI处理结果如图7所示。由图可知,MTI只能对消掉部分零频附近风轮机杂波,但是由于风轮机杂波产生的频带较宽,远大于MTI滤波器的槽口,因此MTI对风轮机杂波的抑制效果差,无法做到对杂波的有效抑制。 图7 回波MTI处理结果 当α=90°,β=90°时,回波信号时频特征如图8所示,由图8(a)可知,风轮机叶片的时频域特征由零频带、时频域“闪烁”以及正弦曲线包络三部分组成,由3.2节理论分析可知时频域“闪烁”是由于当叶片垂直于雷达视线时,叶片上所有散射点发生镜面反射相干叠加造成的,这与出现在时域闪烁出现的时刻相一致。正弦曲线包络是由叶尖散射点的强散射引起的,而零频带则是由叶片中心的散射点引起的。由于目标1和目标2在观测时间内为匀速运动,因此其频率不随时间发生变化,不存在正弦调制现象,在图中可以看出目标1和目标2的时频图为两条直线。图8(a)仿真数据风轮机叶片信号特征与图8(b)某型雷达实测数据相一致,证明了本文所提出信号模型的有效性。 当α=0°,β=90°时,如图8(c)所示,此时雷达视线(LOS)垂直与叶片旋转平面,叶片上散射点与雷达之间的距离在叶片旋转过程中保持不变,各散射点与雷达之间不存在径向运动,多普勒频率始终为零,因此不存在闪烁现象。 图8 风轮机回波信号时频域特征 1)本文基于线性调频脉冲压缩信号提出了风轮机叶片回波模型,并相应构建了其信号幅度模型,通过仿真验证了模型的有效性。 2)根据本文所构建模型仿真结果表明,当风轮机叶片与雷达视线垂直时,由于散射点间的相干叠加,在时域和时频域存在“闪烁”效应。风轮机叶片会在频域会产生一条矩形脉冲频带,产生频率“集聚”效应。叶片散射点的多普勒频率随叶片旋转呈现正弦函数变化。 3)通过仿真证明了由于频域的“集聚”效应,MTI无法有效抑制风轮机杂波。在时频域,风轮机杂波不同于一般目标的时频域变化特性使得杂波抑制和目标分离成为可能,为下一步研究指明了方向。3 回波特征分析
3.1 时域特征分析

3.2 频域特征分析



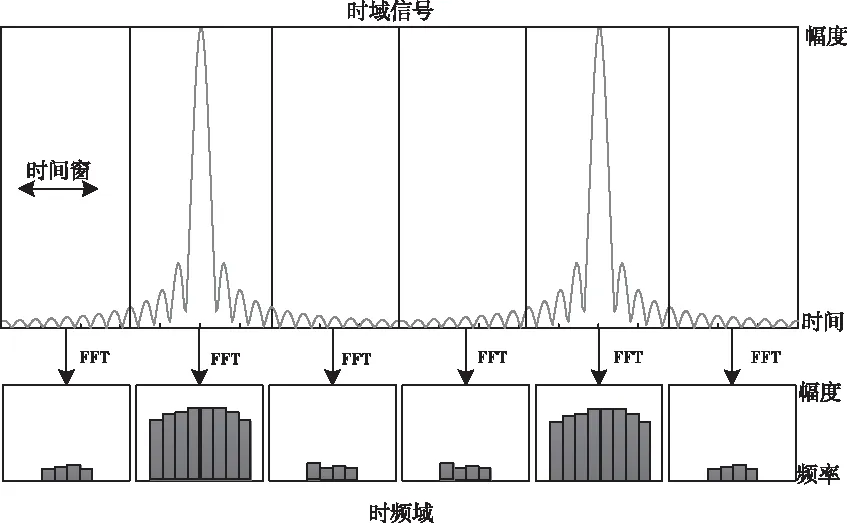
3.3 时频频域特征分析
4 仿真验证与分析

4.1 时域特征仿真与分析

4.2 频域特征仿真与分析

4.3 时频域特征仿真与分析
5 结论
猜你喜欢
珠江水运(2022年13期)2022-08-04
成都信息工程大学学报(2022年2期)2022-06-14
空天防御(2022年1期)2022-05-24
舰船电子工程(2022年1期)2022-02-12
振动工程学报(2019年2期)2019-05-13
科学与财富(2017年1期)2017-03-17
物联网技术(2016年11期)2017-01-12
科学与财富(2016年18期)2016-12-22
能源研究与信息(2015年3期)2015-11-18
现代电子技术(2009年7期)2009-06-25
