
改进天牛须算法在采煤机调高中的应用仿真
2021-11-19 08:17李继忠盛长斌陈伟华
计算机仿真 2021年10期
贾 文,李继忠,盛长斌,陈伟华
(1.山西焦煤集团岚县正利煤业有限公司,山西 吕梁 035200;2.辽宁工程技术大学,辽宁 葫芦岛 125105)
1 引言
采煤机作为重要的井下开采设备,其自动化智能割煤技术已经成为综采工作面主要的研究发展趋势[1]。针对采煤机系统实现滚筒稳定且快速的调高问题,近年来,在采煤机领域内的一些专家和学者做了大量的研究工作,并取得了一定的科研成果。陈浩峰[2]等建立了滚筒调高阀控缸的数学模型,为以后调高控制方案提供了切实可行的依据。戚海永[3]利用Matlab/Simulink程序包搭建了液压仿真模型,为控制器的设计提供了仿真依据。郭卫[4]等人提出了基于Elman神经网络的采煤机自动调高控制策略,但系统的运算量较大,神经网络训练需要大量的先验数据,难以在实际情况中使用。随着仿生优化算法被广泛提出,PID调参技术得到了进一步革新。朱清智[5]等提出了一种使用鲸鱼优化算法来优化PID参数的方法,毛君[6]等针对采煤机调高环节,提出了一种新型萤火虫算法优化PID控制器的控制策略,杨晓[7]等人将改进粒子群优化算法用于PID控制理论中。这些现有的仿生算法虽然在一定程度上解决了PID参数寻优的问题,但它们存在计算量大、易陷入局部最优等缺点。天牛须算法作为一种新型的仿生算法,其具有寻优规则简单收敛数度快的优点,但是其容易陷入局部最优的问题。针对这一问题,本文提出一种改进的天牛须优化算法用于对采煤机调高PID参数的整定环节,此算法解决了天牛须搜索算法有着易陷入局部最优的缺点,同时比传统的人工鱼群算法更具有快速且精确寻优的优势,同时具备稳定性能强的能力,可以为煤炭的高效生产提供依据。
2 采煤机滚筒调高系统
2.1 采煤机调高系统的控制原理
采煤机滚筒调高系统有电气控制系统和机械传动系统两大部分组成。其控制回路主要包括[8]:摇臂机构、截割滚筒、阀控缸、反馈机构和液压控制。采煤机调高系统可以看做成一个电液比例控制系统,其工作原理图如图1所示。采煤机上的检测元件仪器将采集到的数值发送到主控制器中,主控制器根据已编程好的智能优化算法进行计算,通过对输出值的控制进而操控活塞杆执行伸出或者收缩动作,最终达到精确调高的目的。

图1 采煤机液压控制系统调高原理图
2.1 采煤机调高系统的数学建模
根据采煤机调高系统的工作原理,可建立以下的数学模型[9]:
流入液压缸进油腔的流量Q1为
(1)
式中:Cic、Cec分别表示液压缸内、外泄漏系数;P1,P2分别表示液压缸进、出油口压力;y表示活塞运动位移;A1表示液压缸活塞有效面积;V1表示液压缸进油腔容积;βe表示液压油弹性模量。
液压缸回油腔流出的流量q2为
(2)
式中:V2表示液压缸回油腔容积。
可令A2=kA1,则液压缸输出流量可表示为
(3)
整理上述式(1)、(2)、(3)可得到
(4)
因此可得出输出力与负载力之间的平衡方程为
(5)
式中:Mt表示等效总质量;Bp表示等效阻尼系数;K表示等效负载弹性刚度;FL表示任意外负载力。
将式(4)和式(5)作拉氏变换,并进行运算整理得出采煤机电液控制系统中调高系统的数学模型为
(6)
式中:Ka表示增益系数;Kq表示等效流量系数;Kf表示反馈系数;ωh表示系统固有频率;εh表示系统阻尼比。
因为采煤机液压调高系统在工作时存在着惯性负载,可将采煤机截割滚筒调高控制液压缸活塞杆的位移Xp与液压油流量Qm的数学模型表示为
(7)
本文结合采煤机调高系统所选取的模型数学参数为:Ka=1.55,Kq=1.85,Kf=1.2,εh=0.5,ωh=159/rad·s-1,2A1-A2=1.59×10-2/m2。
带入式(7)中得到采煤机调高系统的传递函数为
(8)
3 改进的天牛须优化算法
3.1 天牛须算法
天牛须搜索算法(Beetle Antennae Search,BAS),是在2017年由Xiang-yuan Jiang和Shuai Li所提出来的一种受到天牛觅食原理启发而开发的新型方生物性能智能寻优算法[10]。该算法的仿生搜索原理为:天牛根据食物散发出来的气味强弱来觅食。期初天牛不需要知道食物的具体位置,而是通过两只触须来探寻食物气味的强度,如果左须接收到的食物气味强度大于右须接收到的食物气味强度,则天牛会向左侧移动一段距离并做下一次的寻食。如此循环进行,直至天牛找到食物气体最浓的位置完成觅食工作。根据天牛这一觅食原理,可以得到天牛须搜索算法,具体步骤如下[11]:
1)天牛在一个既定空间中觅食,并由此推出n维空间下的寻优觅食;
2)天牛每次觅食的头朝向是随机的;
3)将该只天牛作为一个质心,且左右两须顶点到质心的距离等同;
4)两须间的距离与天牛一次步长之间存在一定的系数关系,即大的天牛走大步,小的天牛走小步。根据天牛觅食的搜索进度来时刻改变两须之间的距离以及步长大小。
根据以上对天牛须仿生搜索算法的描述,可以建立以下数学模型:
1)假定天牛在一个n维空间中进行觅食,其质心设置为zx,天牛的左须为al,右须为ar,两须之间的初始距离为d0,两须间的距离与天牛一次步长step之间的系数为c[12]。需要最注意的是,两须之间的初始距离d0以及天牛第一次步长step0设定值要充分考虑能够跳出局部最优值以及保证天牛后期能够正常寻优。
(9)
式中rand(n,1)表示随机生成的n维向量;
(10)
(11)
式中zxt为天牛第t次觅食对应质心所在的位置,dt为天牛第t次觅食对应两须之间的距离,其值会随觅食次数的增加而减小,衰减系数为eta_bc,即dt=eta_bc*dt-1,通常eta_bc取值为1~0.95之间[13]。
4)利用天牛左右两须的坐标求得其适应值fitnessl与fitnessr,通过两值之间的差值来影响下一次天牛质心所在的位置,即:
(12)
式中,sign为符号函数,stept为第t次觅食步长,其值与天牛两须之间的距离有关,即
stept=c*dt
(13)
5)判断以上过程是否搜寻到函数的最优值或是否达到迭代次数,若不满足以上条件则重复上述2)~4)步骤,直到满足既定条件后跳出循环,结束寻优过程。
3.2 改进的天牛须优化算法
在鱼类活动行为中聚群行为是鱼类常见的现象,这是它们的生存方式。追尾行为是指当一条或几条鱼发现最佳食物点时,其它鱼群会向其进行汇聚。随机行为体现出鱼类的活动是随机的,其目的是能在更大范围内进行觅食。以上是鱼群的几个经典行为,鱼群会根据不同时刻在不同行为中进行转换,这些行为与鱼群觅食和生活方式密切相关,并且与解决局部最优问题也有着紧密的联系[14]。
天牛须搜索算法为单一个体的寻找最优值方法,尽管系统对天牛须的两须距离和步长的初始值做了取值要求,但依旧容易出现局部最优问题。针对这种情况,本文将单一个体转化为天牛须群,并利用人工鱼群中所包含的聚群行为、追尾行为和随机行为,与天牛须搜索算法有效的结合起来,在保证系统误差尽可能小的情况下,快速搜索到全局最优。改进后的天牛须优化算法流程如图2所示。

图2 改进后的天牛须优化算法流程图
4 系统仿真验证及PID参数整定
4.1 算法寻优分析比对
为验证改进的天牛须优化算法寻优的有效性和优越性,现将该算法与普通的天牛须搜索算法两者之间进行PID参数的寻优计算。将这两种寻优算法在matlab仿真软件中进行程序编写。其中改进的天牛须优化算法程序初始化设定参数如图表1所示。

表1 改进的天牛须优化算法参数设定
两种优化算法经过matlab仿真后分别得到的Kp、Ki、Kd三个参数,并利用ITAE以及稳定迭代次数作为衡量算法优越性的性能指标。经过多次仿真训练,取其中的10次训练结果得到相关数据如表2所示。

表2 普通天牛须搜索算法与改进的天牛须优化算法寻优数据对比
选取以上的一组数据图像,其中以ITAE作为寻优值的指标,两种算法的对比结果如图3、4所示。

图3 普通天牛须搜索算法的寻优图像

图4 改进天牛须优化算法各参数的寻优图像
通过仿真数据发现,普通天牛须搜索算法受天牛的初始步长、左右两须之间的初始距离以及各自所对应的衰减系数影响较大,其初始参数完全依赖于系统本身,不适用于变参数的线性系统,且在寻优计算过程中会容易陷入局部最优从而产生较大的误差,稳定迭代次数较大。改进的天牛须优化算法在寻优的速度上以及误差比较中都具有优越性,更能保障采煤机在复杂环境中工作的稳定性。从仿真所生成的数据表中可以看到改进的天牛须优化算法中ITAE值更小,表明该算法的运算精度很高。
4.2 采煤机调高系统模拟仿真
matlab将通过上述Kp、Ki、Kd三个参量的多次迭代处理结果的最优值导入到在simulink已经搭建好的仿真结构图中[15],如图5所示。

图5 系统仿真结构图
系统以单位阶跃信号作为输入信号,经仿真后的波形图如图6所示。从图中可以看出系统仅经过0.1秒便到达设定值,系统响应速度快。
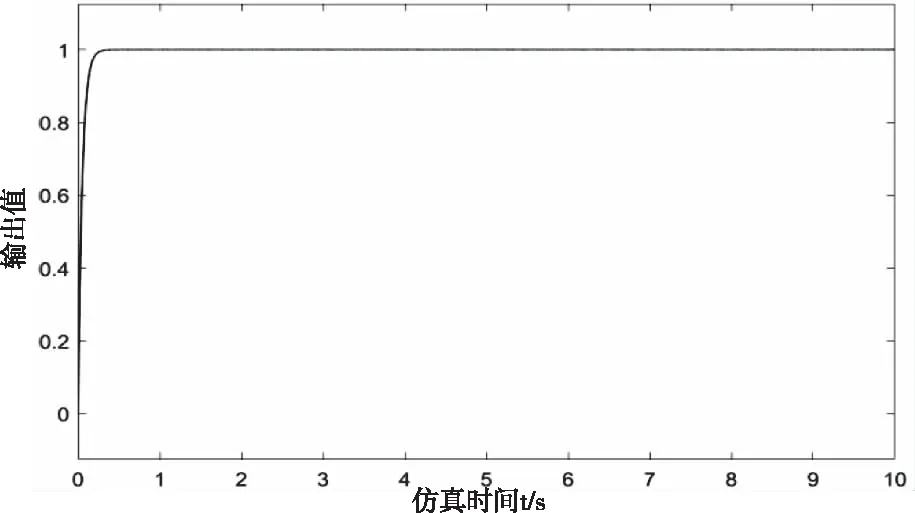
图6 系统仿真输出波形
为验证系统具有良好的稳定性、平滑性和鲁棒性。在仿真的第3秒时,对系统加入一个阶跃信号,用来模拟采煤机截割滚筒高度的变化;在仿真第7秒时加入一个幅值为0.7的扰动信号。得到的仿真波形图如图7所示。

图7 系统调高及扰动波形图
从图像中可以看出系统在改变滚筒高度或受到扰动信号干扰时,从图中能够看出,系统受到扰动后用了0.1s的时间恢复到稳定水平,表明系统对扰动有着较好的抗性,鲁棒性强。同时可以看到系统还具有较小抖震,表明系统具有良好的稳态特性,符合采煤机系统在调高过程中的工作需求。
5 结论
本文以天牛须搜索算法为基础,将鱼群算法中的聚群行为、追尾行为和随机行为引入到天牛须搜索当中,得到了改进的天牛须算法算法。将改进的天牛须优化算法与普通的天牛须搜索算法进行寻优比较,得出新型算法更具有快速收敛性、稳定性和鲁棒性。将此算法运用在采煤机系统调高的工作中,以ITAE数值作为目标参量,结合matlab编写寻优程序,并将最优值传递给simulink中的系统模型进行仿真。通过对不同信号的跟踪,和干扰的仿真。结果表明设计的控制器稳定有效,为采煤机调高工作提供了有效的依据。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
广东造船(2022年3期)2022-07-09
科技创新与应用(2022年14期)2022-06-02
矿山机械(2022年2期)2022-03-02
防爆电机(2022年1期)2022-02-16
北京航空航天大学学报(2021年4期)2021-11-24
装备维修技术(2020年15期)2020-11-28
智能计算机与应用(2018年3期)2018-09-05
中国高新技术企业(2017年11期)2017-07-08
环球市场信息导报(2017年4期)2017-05-18
