
基于车联网的定位技术研究及展望
2021-11-22 08:13马佳荣李兰凤张志恒
物联网技术 2021年11期
马佳荣,李兰凤,张志恒
(1.西安文理学院,陕西 西安 710065;2.空军工程大学,陕西 西安 710043)
0 引 言
车联网技术[1]的持续发展为提高道路交通运行效率及管理水平、保证道路交通安全提供了新的方向。车联网技术不仅能够协调缓解城市交通拥堵问题,还可通过向车辆提供当前道路整体交通状态信息,帮助车辆选择最优路径,以达到节能减排的目的。
上述目标实现的前提是定位技术的广泛应用,特别是对于交通安全事故而言,高精度的定位技术还能提醒车辆避免碰撞,保证驾驶员和乘员的生命财产安全。考虑到车联网环境中,车辆节点移动速度较高、网络稳定性较差且受限于无线信号的固有缺陷(多普勒效应和信号衰减),有必要对车联网环境中的定位技术展开研究。
目前,车联网环境中使用的定位技术种类多样,不同技术间存在明显的特性区别。考虑到不同的车联网应用场景,本文首先对车联网定位技术的整体状态进行了简要的介绍,然后针对主流的车联网定位技术进行了详细的梳理,最后对车联网环境下总的定位技术发展进行了总结和展望。
1 车联网定位场景
定位技术可根据应用场景划分为军用定位和民用定位两种。对军用定位技术而言,主要负责的是目标位置识别及追踪、协助搜救以及协助飞行器在极恶劣天气下的着陆和发射等;民用定位技术主要应用在车辆轨迹跟踪、旅游业、智能农业等领域。车联网环境中的定位技术属于民用定位,与上述领域相比,车联网应用需要利用定位技术提供更高精度、更低延时的位置参数。
车联网环境中车辆节点对实时位置的定位可借助多种技术完成。一般来说,最常用到的定位技术是全球卫星导航技术;其次,随着蜂窝网的广泛架设,借助蜂窝网络[2]完成直通链路定位[3]也是当前的研究热点。此外,通过与路侧设备建立数据交互连接,车辆节点还可借助路侧设备完成对自身的定位。最后,考虑到车联网环境中车辆节点间的数据共享,针对位置精度需求较低的车联网应用,使用邻居车辆节点位置对当前车辆节点位置进行估计和替换也是可行的方法。车联网定位场景如图1所示。
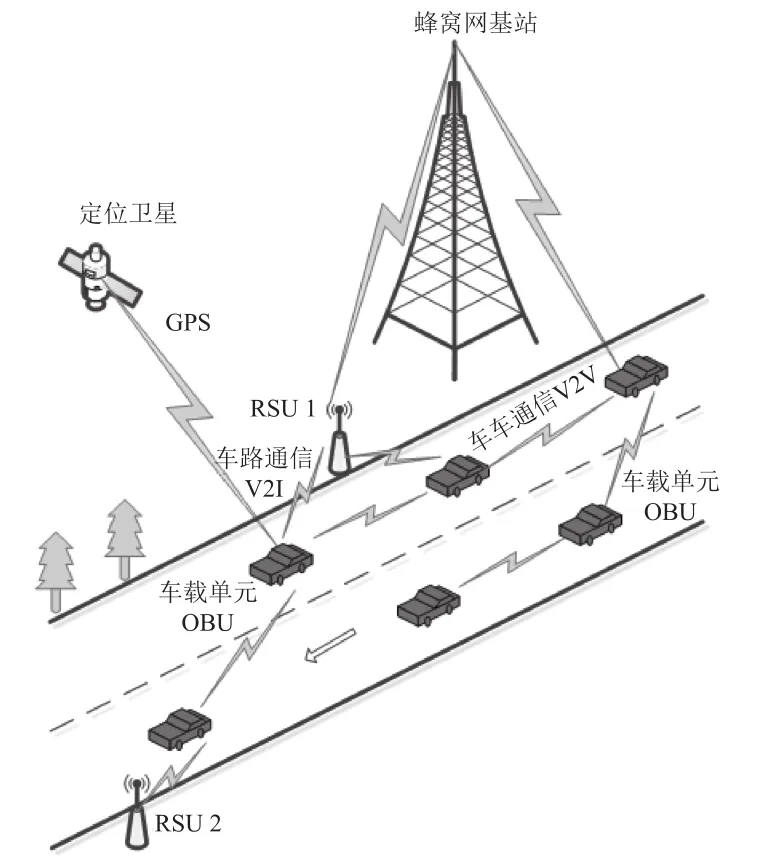
图1 车联网定位场景
2 车联网定位技术
本章主要对当前主流的几种车联网定位技术进行介绍和梳理。
2.1 全球卫星导航技术
全球卫星导航系统[4](GNSS)是一种能在地球表面或近地空间的任意位置,向用户提供全天候的位置坐标的无线电导航定位系统。全球卫星导航系统包括美国的全球定位系统(GPS)、俄罗斯的全球卫星导航系统(GLONASS)、欧洲的伽利略卫星定位系统和中国的北斗卫星导航系统。
最早由美国提出并构建的GPS系统[5]前期主要用于完成军事行动的辅助定位工作。1978年至1993年间,美国相继发射了31颗NAVSTAR卫星、15颗GPS卫星,在此基础上组建了初步的定位卫星网络,并承诺始终保持至少24颗GPS卫星处于为用户提供服务的状态。GPS的工作原理是,分别测量已知位置的卫星到目标对象之间的距离,然后综合计算多个卫星的数据进而获取目标对象的纬度、经度和海拔高度数据。全球定位系统的主体包括21颗工作卫星和3颗在轨备用卫星,运行轨道高度约为2×104km,24颗卫星均匀分布在6个轨道平面内,轨道倾角为55°,各个轨道平面之间相距60°。对目标对象位置进行定位时,可保证目标对象至少被四颗卫星同时检测。特别地,针对GPS定位精度和可靠度,日本进行了技术改进,并研制了QuasiZenith卫星系统,以三颗人造卫星通过时间转移完成全球定位系统区域性功能的卫星扩增。
GLONASS是继GPS之后的第二个全球卫星导航系统,最早由原苏联国防部研制。在技术层面,GLONASS相比GPS具备更好的抗干扰能力,但其定位精度相比GPS较低。北斗卫星导航系统则是由中国自主研发、可独立运行的全球卫星导航系统,利用网络发布广域差分定位解算数据,北斗卫星导航系统可完成高精度的定位[6]。
全球卫星导航系统能够提供精确的位置信息,使用方便,安装简单。然而,其定位精度易受天气条件影响;在车联网环境中,高速移动的车辆节点对位置信息的实时性也提出了更高的要求。
2.2 蜂窝网定位技术
蜂窝网定位技术的应用范围与其覆盖区域的大小相关,最主要的应用场景是城市。同时,车联网环境中利用蜂窝网进行定位须考虑多普勒效应和目标节点位置的动态变化。移动蜂窝定位系统的组建依赖大量蜂窝基站连续、分布式的部署,相邻小区间使用不同的通信频率,以避免干扰并保证每个小区都可获得稳定的通信质量。同时,蜂窝网覆盖范围内,支持多种接入设备(如路由、智能手机、便携式电脑等)的同时连接和数据交换。在蜂窝网中,基站可用于对接入设备的定位。借助蜂窝网对设备进行定位的优势是:多个不同接入设备可同时复用单一传输单元完成定位;同时,使用移动设备进行定位显然在成本控制方面优于卫星定位系统。
2.3 图像/视频定位技术
使用图像或视频数据进行定位的技术不仅能够获取车辆节点位置信息,还可获取车辆节点的物理环境数据,如车道宽度、道路等级、车辆行驶方向等。然而,该技术在使用过程中易产生海量数据,在数据传输过程中易造成网络拥堵。考虑到车联网应用环境,该技术同时还应考虑数据的传输和处理速度,以避免因延迟造成的定位精度下降[7]。
2.4 RSU定位技术
车联网环境中的路侧设备是指布设在道路两旁的基础设施,主要为车辆节点提供网络接入并完成数据的上传和分发。利用RSU技术[8]进行定位时,支持独立定位、协同定位和非协同定位等多种方式。考虑到车联网环境中拓扑结构变化频繁、车辆节点移动易导致延迟,RSU作为固定的网络接入设备能够极大地保证网络的通信质量。同时,大量的RSU作为补充的网络接入设备,可深化提升车联网的通信覆盖范围,保证网络覆盖范围内车辆节点的通信服务质量。考虑到RSU的安装和维护成本,设置合理的RSU数量并保证通信质量也是部署车联网通信体系中的重要一环。
RSU设备不仅能够向车辆节点发送位置信息,还可提供道路交通和实时天气信息。此外,借助专用短程通信技术,RSU还可及时提供避免碰撞提醒。由于GPS信号更易受损或被阻挡,RSU可极大地保证拥堵路段中的车间通信并提供准确的位置信息。对定位技术而言,其核心是获取车辆准确、可靠的位置数据。然而,虚假位置信息会极大地影响基于定位信息的应用的安全性。
2.5 数据匹配定位技术
数据匹配[9]定位技术主要使用有序的位置信息对目标对象的位置进行推演,地图匹配和航迹推算均可归于此类。其中,地图匹配首先利用GPS对目标对象的地理坐标进行预估,然后将坐标数据与真实地图进行匹配。考虑到预估的地理坐标数据点是以列表形式对用户或车辆的移动轨迹进行记录,因此,地图匹配需要构建独立的逻辑模型以描述目标对象。一般来说,地图匹配算法可分为实时匹配和离线匹配两种,实时匹配使用最新的GPS信息与地图数据进行匹配,离线匹配则使用记录的有序数据列表进行匹配。地图匹配根据一定的采样周期读取位置信息,能够拟合出目标对象的近似路径。目前,随着高精度数字地图的普及,拟合的路径可与导航系统中的位置进行匹配,进而能够帮助传感器更精准地实现校准。与此同时,在协同地图匹配算法中,借助车联网网络获取车辆节点的信息,能够实现更高精度的地图匹配。
航迹推算描述了车辆节点借助有效期内的已知位置信息估计当前位置的过程。这一方法常使用三角函数进行推算。目标对象的位置信息记为(x, y),系统原点为(0, 0),则利用航迹推算i时刻目标节点位置的计算公式为:


其中:(x0, y0)是车辆节点时刻的初始位置;di为上一时刻位置与当前时刻的最短路径;θi是在上一时刻位置处变化的方向角。可以看到,借助位置、移动方向、速度、距离、时间和风向等信息,航迹推算能够完成对节点覆盖范围之外的目标对象的定位。典型的一种航迹推算算法是:基于车辆最新的位置信息、当前的行驶速度和方向,能够推算出GPS未覆盖区域内的车辆位置。航迹推算的缺点则主要体现在定位准确度上,这主要是因为存在一定的延时。
2.6 RSSI定位技术
RSSI定位技术[10]借助高精度信号功率检测设备对接收到的信号质量进行测试,通过引入损耗信号传播模型,对接收的无线电信号功率进行计算,可对目标节点与检测设备间的距离进行测算,进一步获取目标节点的位置信息。考虑到无线电信号慢衰落、多径衰落和传播过程中的信道损耗等固有缺陷,加之无线信道干扰、噪音等影响因素,RSSI定位技术中的损耗模型计算方法可表述为:

其中:PL(d0)是单位距离内无线信号传播模型中的路径损耗;X是服从高斯分布的随机数;d是接收器和发射器间的距离;n是环境因子。在上述条件下,RSSI值的计算方法为:

其中:Pγ是无线信号功率;Gγ是传输天线增益。
RSSI定位技术中信号检测功率是基于IEEE 802.11标准执行的,范围是0~255。一般而言,只要目标接近RSU或接入点,信号传输功率就会转换为RSSI值。RSSI定位的工作原理如图2所示。

图2 RSSI工作原理
2.7 TDOA定位技术
TDOA定位技术是通过计算接收节点和锚节点间的时间差值获取接收节点和传输节点间的距离。无线电信号首先由目标节点发出,然后由至少3台位于不同位置的接收节点天线在不同时间捕获信号,借助对到达信号的时间差值的计算,目标节点的位置信息即可确定。
相比TDOA,TOA使用的是传输节点到接收节点间信号的绝对到达时间,因此TOA亦被称为飞行时间技术(TOF)。接收节点和传输节点间的距离利用无线信号的频率和速度进行测算,显然目标节点和锚节点需要保证同步。考虑到误差的存在不可避免,实际应用中的常见做法是为锚节点引入一个公共定时钟源,锚节点与定时钟源间的距离可直接通过计算到达时间和速度获得。
3 结 语
定位技术的选择是车联网应用准确执行的前提。从覆盖范围来看,GNSS能够满足大部分应用场景的需求。在GNSS不可用的场景中,蜂窝网定位技术、RSSI定位技术、视频定位技术能有针对性地对定位需求进行补充。目前,我国正在开展的C-V2X直通链路定位即融合GNSS和蜂窝网的定位技术,预计未来可达到全天候、全场景的定位目标。
猜你喜欢
党的生活(黑龙江)(2022年4期)2022-04-25
卫星应用(2022年1期)2022-03-09
现代装饰(2021年1期)2021-03-29
科学大观园(2020年14期)2020-07-17
环球时报(2020-06-24)2020-06-24
四川冶金(2019年5期)2019-12-23
通信世界(2018年27期)2018-10-16
风能(2015年10期)2015-02-27
单片机与嵌入式系统应用(2014年9期)2014-03-11
