
新型人体摔倒监测仪研制
2021-11-22 14:29刘佳庆徐善智任家智李思卜
山西能源学院学报 2021年4期
刘佳庆 徐善智 任家智 李思卜

【摘 要】 本文针对特需人群、老年人摔倒可能带来严重损伤的痛点,设计了一种新型人体摔倒检测防护仪。本系统主要集成了摔倒动作检测模块、人体心率实时检测模块、GPS北斗双模定位模块等。当佩戴者出现摔倒动作且无操作时,系统则判定为摔倒状态,此时系统控制蜂鸣器大声报警,同时系统与远程服务器通信,向监护人推送通知;心率传感器可以实时采集心率信息,可以实现对佩戴者生理健康状态的监测。本设计已通过实验测试,并满足实际应用需求。
【关键词】 摔倒检测;加速度传感器;GPS北斗双模定位
【中图分类号】 TP23 【文献标识码】 A 【文章编号】 2096-4102(2021)04-0099-04
随着我国人口老龄化加快,空巢和留守现象也越来越常见,老人摔倒后最容易出现的是骨折,骨骼移位,软组织损伤。随着年龄的增长,常伴有骨质疏松,身体机能衰退的情况,跌倒后出现骨折,骨骼异位的情况屡见不鲜见。也有一部分老人因为摔倒会出现脑出血的症状,对身体健康造成一定的伤害。如果老年人在家中发生意外跌倒,却没能获得及时的治疗,后果是不堪设想的,因此,在跌倒与及时救治领域的研究,其重要性在社会意义层面不言而喻,已然引起了国内与国外学者的研究热潮。
目前,能有效监测摔倒的技术主要有三类:基于视频图像进行分析、基于音频信号进行分析、便携穿戴式的检测方式。视频图像分析需要数据量大,安装成本高,存在隐私问题。音频信号分析准确度差,易受到干扰,误差大,成本高;穿戴式检测设备携带方便,安装成本低,准确性较高。本文设计的新型摔倒检测防护仪在一种新的摔倒检测方案设计基础上,采用了新型GPS与北斗双模定位模块,增加了远程守护报警功能,同时加入了蜂鸣器,以便于救助,采用可充电锂电池供电,大大提高了可佩戴时间。
1监测仪组成
本监测仪使用STM32F103C8T6单片机控制,采用六轴加速度传感器对人体的x、y、z三个方向加速度值进行实时采集,再通过计算就可以获得人体合加速度数据,即加速度向量幅值SVM(signal vector magnitude,加速度向量幅值)。参考人体摔倒时的阈值和人体倾斜角度的阈值,当单片机计算得到的值同时超过以上两个阈值,初步判断为人体出现跌倒,蜂鸣器发出报警遇险呼救声。若为系统误判,可在一定时间内进行手动按下设备上的按键,便可复位装置,避免系统误报,如果超过设定一个时间未人为按下按钮或其他行为则确定为跌倒不起状态。立即以短信、微信等形式告知家人,心率传感器实时检测心率,家人可通过手机App查看摔倒地点和佩戴者心率情况。
监测仪组成框图见图1。
2系统模块
2.1 GPS-北斗双模定位模块
采用M8TLF双模定位模块,该模块支持美国GPS、中国北斗、俄罗斯GLONASS等多种系统混合定位,为了在实际情况下得到良好的定位效果,将模块输出设置为GP(美国GPS)+GB(中国北斗)组合定位模式;GPS定位功能实现是通过GPS北斗双模定位模块获取当前经度、纬度值,再将其通过IIC(inter-integrated circuit,集成电路总线)接口发送给单片机主控进行解析,解析后的经纬度数据再经过蓝牙发送手机再上传到服务器。服务器将经纬度数据转发给监护人App客户端,对接收的经纬度数据处理并解析就可得知佩戴者的跌倒位置信息。
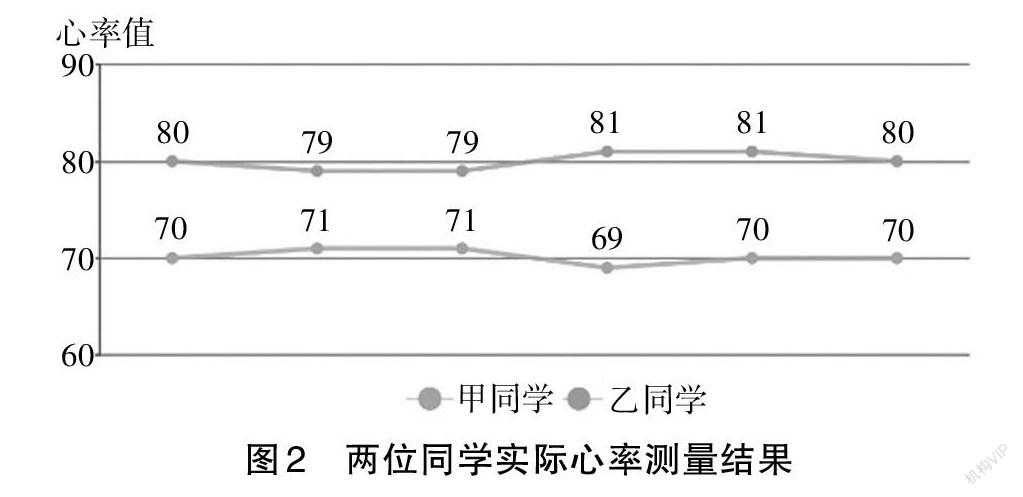
2.2 Max30102心率传感器
该模块检测原理为:当LED光射向皮肤,透过皮肤组织反射回的光被光敏传感器接受并转换成电信号再经过ADC(analog-to-digital converter,模数转换器)转换成数字信号。由于模块自带ADC转换,所以我们只需要将模块缓冲区的值通过单片机IIC接口读取即可,将读取出的值进行计算即可得到心率值。
实际测量效果见图2。
2.3 MPU-6050加速度传感器
由于人体的运动情况非常复杂,要想精确地检测到动作变化,需要一款精度高、反应灵敏的加速度传感器。MPU-6050为高度集成的6轴运动处理传感器,它集成了MEMS陀螺仪与加速度计,在实现缩小了体积的同时降低了各部分通讯的延时,用于采集佩戴者的姿态信息,可准确追踪快速与慢速动作,这为精准检测佩戴者的身体运动状态变化强度提供了可能,为此我们利用单片机IIC接口获取MPU-6050缓冲区的数据,通过算法滤波后,即可用于计算人体加速度向量幅值SVM和倾角φ。
3摔倒檢测算法
生活中大多数时候,人体最基本的动作可分为静止、运动两种情况。可以认为静止动作包括最基本的立、蹲、坐、躺。这些基本的静止动作通过变化组合就形成了基本的运动动作,包括走、跑、跳、下蹲、弯腰等。在研究摔倒的问题时,需要将身体不同角度的倾斜看作人体静态姿势。人体在产生这些运动时,人体模型会有两个明显变化的特征:向量幅值SVM以及倾角φ。通过对人体大量动作的两个重要指标进行采集、分类和研究,发现运动状态变化强度与身体的加速度和倾角存在一定的关系,所以我们可通过判断运动状态变化强度从而来判断是否发生了跌倒动作。
3.1跌倒检测因素
3.1.1速度瞬态变化
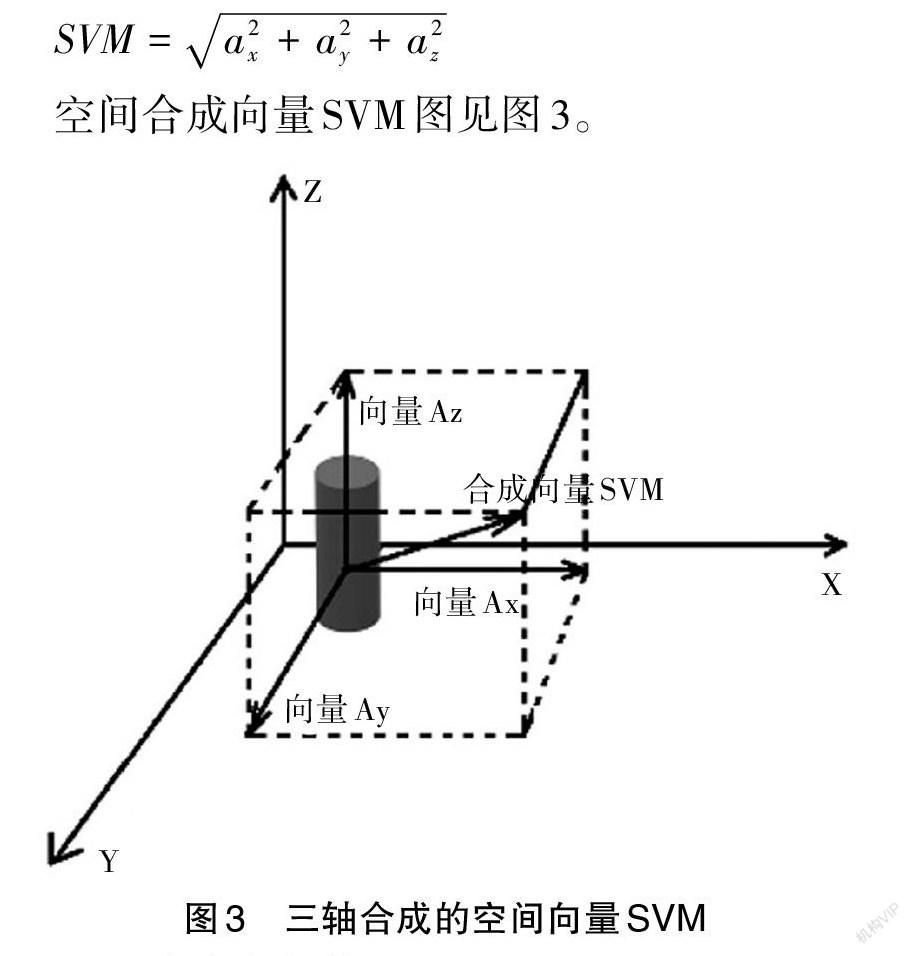
人体在运动时伴随着人体速度瞬态变化,即加速度向量幅值SVM变化。可以用SVM来研究人体产生动作时的情况。SVM加速度幅值的大小表明运动情况的强弱。其定义为:在空间直角坐标系下,三个方向的加速度的合成加速度,适合用来研究空间内的物体运动。
空间合成向量SVM图见图3。
3.1.2姿态角解算
MPU-6050内部集成的DMP(digital motion processor,数字运动处理器),可以将内部集成的陀螺仪得到的原始数据,实时转换成四元数输出,主控单片机得到四元数数据之后,通过滤波处理与计算就可以很方便地计算出三个方向上的角度变化。
系统组成框图见图4。
3.2判定标准
人体的加速度向量幅值SVM实际测验时,SVM正常状态下值是1700左右,当以不同的激烈程度晃动设备时,接收到的安全加速度约在1200-2200之间。因此我们可以设置高低阈值,当SVM超出1200-2200范围时,佩戴者10s未按下复位按键则判定为异常,且蜂鸣器大声报警。
人体的倾角φ实验数据显示,人体处于直立状态时,人体与Z轴方向的夹角φ总小于60度;当人体处于水平躺下时,人体与Z轴方向的夹角φ接近90度;人体在跌落时,可以认为人体从直立状态变为水平状态。所以我们可以将人体倾角φ值为60度作为摔倒时的角度阈值,本研究根据传感器安装方式,可任选两个姿态角作为倾角φ,其中任意倾角φ大于阈值即可认为是摔倒动作产生。
人体向不同方向摔倒时角度变化情况见图5。
4测试数据与分析
4.1正常运动时SVM和倾角φ值获取
为了检测到人体摔倒动作产生时的SVM向量和倾角φ的阈值,我们对本设计正常运动时和摔倒时的SVM向量和倾角φ进行了实验测试,本实验中正常运动实验测试包括:直立、慢走、慢跑、蹲下、弯腰等运动。每次实验包括对同一动作采集倾角φ值和SVM向量值10次,一共进行六次实验,大大提高实验准确性。
在进行摔倒实验时,每次实验要求向同一方向摔倒,同时采集倾角φ和SVM向量的变化,每次实验要求可以选取任意方向测试,一共进行六次实验。
正常运动SVM向量变化情况图见图6。
每次实验,实验者向相同方向产生动作,每次实验之间互不影响,可随机方向。从而测得人体倾角φ情况。
正常运动时,倾角φ值情况图见图7。
4.2摔倒时SVM和倾角φ值获取
当佩戴者出现摔倒动作时,SVM向量变化情况和倾角φ变化情况见图8、图9。
4.3结果分析
通过上述实验,可以发现,选取合适的阈值即可区分摔倒动作是否产生,人体直立静止时,SVM向量为1700,倾角φ为0°,通过上述实验数据发现,当佩戴者进行正常运动时,可以发现SVM值的变化在1200-2200之间,傾角φ在0°至60°之间;当发生摔倒动作时,SVM和倾角φ发生较大变化,SVM变化超过2200,倾角φ超过60°。为此,我们将SVM的阈值设为2200,同时将倾角φ设置为60°时,可以灵敏地检测到佩戴者摔倒。
5结论
通过对人体摔倒动作的研究,采用了合理科学的实验方法,对人体摔倒前后SVM向量和倾角φ作对比,通过设定阈值,可以准确地检测出是否发生了摔倒,同时可有效避免正常运动的误触发,实际应用效果良好。
通过实际实验测试,本监测仪可以准确地监测老人的摔倒动作和生理健康状态,可以将摔倒对老人的伤害降至最低,可以满足社会需要。
【参考文献】
[1]王晓雷,李栋豪,郑晓婉,等.基于极限学习机快速分类的人体跌倒检测方法[J].科学技术与工程,2019,19(20):258-264.
[2]蔡靖,樊毅尧,董子健,等.基于穿戴式平台的老人摔倒监测系统设计[J].传感器与微系统,2017,36(7):130-133.
[3]张军建. 基于三轴加速度传感器的体位突变检测研究[D].济南:山东师范大学,2014.
[4]彭昊. 基于陶瓷压电传感器的智能床垫系统设计[D].合肥:合肥工业大学,2018.
[5]李邵颖,赵文娟,王增彩.小型四轴飞行器控制系统的研究[J].时代农机,2018,45(10):250.
[6]余星. 基于捷联惯性的水下载体姿态检测系统研制[D].杭州:杭州电子科技大学,2013.
[7]徐涛,孙威,色海锋,等.老人跌倒姿态实时识别系统硬件设计[J].沈阳航空航天大学学报,2019,36(1):63-70.
