小型仿生人工手指触觉感知系统设计*
2021-11-24 02:12余婉婷孙勇智张文奇
飞控与探测 2021年4期
余婉婷,孙勇智,陈 萌,张文奇,陈 晓
(1.浙江科技学院 自动化与电气工程学院·杭州·310023;2.上海宇航系统工程研究所·上海·201109)
0 引 言
触觉是人类感知周围环境的重要手段。近年来,随着机器人技术的不断发展,机器人仿生触觉研究也越来越受到重视。在航空航天、医疗卫生和家庭服务等需要精细操作的场景中,单纯依赖机器人视觉不足以解决问题,机器人还需要目标物体的温度、硬度、压力和表面粗糙度等物理属性信息。触觉传感器是获取这些信号的有效方式,对于完成这些操作而言具有重要的意义。
自20世纪80年代开始,学者对触觉传感器设计的原理和方法进行了大量的研究,主要发展了以下几种类型的触觉传感器,即压阻式触觉传感器[1-6]、压电式触觉传感器[7-9]、电容式触觉传感器[10-11]以及光学式触觉传感器[12-13]。压阻式触觉传感器中的应变计和压阻计灵敏度高、稳定性好,但体积大、操作不灵活。同时,导电聚合物类响应滞后明显,导电液体类存在耦合现象;压电式触觉传感器柔性好、成本低,但易受噪声影响,稳定性差,导致了其系统电路复杂;电容式触觉传感器动态响应好、灵敏度高、电路设计简单,但其输出表现为非线性,有迟滞性,且柔性差;光学触觉传感器多为光纤式传感器,对其的处理较为复杂,其受外部光照影响大。上述触觉传感器大部分功能比较单一,且电路复杂、体积大,易受限于特定的环境。
本文设计了一种小型仿生手指触觉感知系统,该系统体积小、结构简单,可检测三维接触力、温度、压力等物理量。该系统采用导电液作为传感器的介质层,内置了热敏元件、压敏元件、电极阵列等敏感元件。热敏元件测量接触点的温度,压敏元件测量受力的大小,电极阵列组成一个传感单元,通过测量电极间液体阻抗的变化来检测受力的位置和接触物体的大小。
1 仿生手指系统结构
仿生手指机械系统[14-15]是感知系统的基础和载体,主要由指骨、柔性皮肤、指甲盖三个部分组成,如图1所示。指骨是敏感元件及其信号处理电路的载体,用于固定支撑整个传感器;柔性皮肤具有较好的柔顺性和弹性,与指骨之间形成了可存储导电液的密闭空间;指甲盖可通过螺钉将柔性皮肤固定在指骨上,防止柔性皮肤移动,同时还可起到密封导电液体的作用。
指骨结构包括前部的手指头部分和后部的骨节部分。指骨前部用来固定含有温度传感器和电
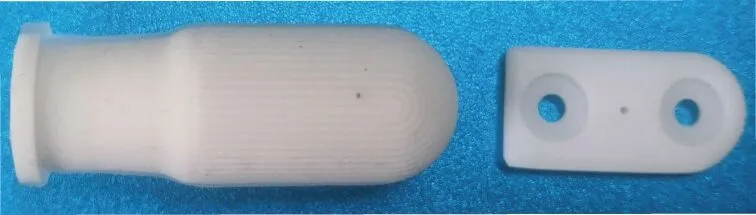
(c) 柔性皮肤及指甲盖图1 仿生手指的系统结构Fig.1 System structure of bionic finger
极阵列的柔性电路板。根据柔性电路板良好的伸展特性,温度传感器和电极阵列可被平整地固定在不规则的手指指骨上。指骨后部为镂空的正方体结构,镂空部分用于安装和固定压力传感器,外部四个定位孔用于固定信号调理和数据采集电路板。位于指骨中间的凹槽设计,可使柔性皮肤与指骨良好接触,保证导电液的密闭性。
柔性皮肤采用硅胶制成,具有良好的绝缘性和类似人皮肤的柔软性。另外,柔性皮肤内掺杂了氮化铝,具有很好的柔韧性和导热性,对手指传感器的温度测量更加快速和准确。柔性皮肤的表皮和内部都有指纹设计,这使得传感器对接触表面粗糙度的测量更加灵敏。指甲盖上包括了两个固定皮肤孔和一个注射孔,其主要作用是固定柔性皮肤,注射孔的设计也起到了加强密封的作用。
2 系统硬件设计
系统的硬件结构设计如图2所示,以STM32F411为主控芯片(下位机),可完成对温度、压力和触觉电极阵列信号的采集,并通过USB将采集到的数据传输至PC机(上位机)。硬件电路包括单片机数据采集电路、触觉电极阵列电路、温度传感电路和压力传感电路等。其中,触觉电极阵列电路包括了电极阵列和电极信号调理电路。

图2 手指传感器的系统硬件结构Fig.2 Hardware structure of finger sensor system
STM32F411嵌入式控制器是基于ARM Cortex-M4内核的高性能微控制器。该微控制器采用单时钟/机器周期工作模式,具备内嵌浮点处理器,包含512k字节的Flash存储器和高达128k字节的SRAM。片内外设包括11个定时器,16路12位AD转换器,支持USB总线,满足了手指传感器系统数据采集与系统控制的硬件需求。同时,封装尺寸最小可达3mm×3mm,满足了对小巧体积的需求。
温度感知元件采用了双端集成电路温度传感器AD590JCPZ,其封装大小仅为3mm×2mm,温度测量范围为-55℃至+150℃,非线性误差为±0.3℃。由于该温度传感器的输出电流与绝对温标成正比,比例系数为1μA/K,因此可采用电压—电流转换电路,将电流信号转化为0~3.3V的电压信号。当应用AD590时,无需应用线性化电路、精密电压放大器、电阻测量电路和进行冷结补偿,具有测温稳定、精度高的特点,满足了手指传感器对体积小、测量精准、电路简单的要求。AD590温度传感器及电压—电流转换电路如图3所示。

(a)AD590温度传感器

(b)电压-电流转换电路图3 AD590温度传感器及电压—电流转换电路Fig.3 AD590 temperature sensor and voltage-current conversion circuit
外界压力可通过柔性皮肤内的导电液和指骨内部的液体通道实现传递。压力传感器能够感知压力信号,并且按照一定的规律将其转换为电信号。压力传感器对精度高、体积小、功耗小、可靠性高、低压供电等性能有所要求。为了精确测量该液体压力信息,本文采用了40PC015G2A压力传感器。该传感器可将液体压强转换为模拟电信号,并且在内部集成了放大模块,简化了电路设计。与其他同级别的压力传感器相比,40PC015G2A的尺寸较小,满足了将传感器嵌入到指骨内部的、对结构的要求。40PC015G2A压力传感器及其信号调理电路如图4所示。

(a)40PC015G2A压力传感器

(b)压力传感器信号调理电路图4 40PC015G2A压力传感器及其信号调理电路Fig.4 40PC015G2A pressure sensor and its signal conditioning circuit
电极阵列是由4个激励电极和14个感知电极组成的、具有一定空间分布的阵列,激励电极和感知电极之间通过导电液体的阻抗进行耦合。激励电极用来在导电液体中产生幅值不变的交变信号。当手指接触物体而产生形变时,手指内的导电液体的分布会发生变化,从而改变电极之间的阻抗,在感知电极上测量到的信号也会发生改变。因此,可利用感知电极信号的变化得到各个电极之间的阻抗变化,进而来映射整个导电液体空间的形状变化,以及传感器受压形变的特征,进而提取出接触点的位置、接触物体局部受力特征以及三维力等高级特征。由于电极数目较多,手指传感器对体积的要求较高。因此,为了使电极阵列信号调理电路小型化,运算放大器选用了具有四通道的TLV9054器件。该器件为WQFN封装,具有体积小的特点,可在低至1.8V至5.5V的电压下运行。另外,TLV9054器件可以在非常高的压摆率下实现轨至轨的输入和输出,具有单位增益稳定的特点,且集成了RFI滤波器和EMI滤波器。手指传感器感知模块运用了四片TLV9054运算放大器,经过调理后的电极阵列信号通过板对板连接器连接到单片机数据采集电路板。由于电极阵列要求覆盖整个手指指腹,且指骨形状不规则,因而可采用柔性电路板制作电极。为了确保指尖与手指的贴合,可将指尖多余部分去除,制成异形电路板。异形电路板通过FPC接口与信号调理电路实现连接。柔性板电极阵列和其中一路电极信号调理电路如图5所示。
3 软件系统设计
3.1 软件系统组成
手指传感器软件由下位机软件和上位机软件组成:下位机软件运行于STM32F411微控制器中,用于完成触觉传感信号的采集与处理功能;
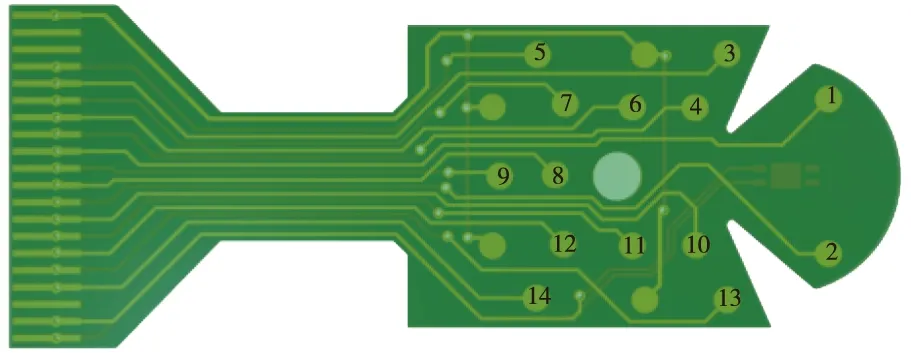
(a)电极阵列柔性电路板

(b)电极信号调理电路图5 柔性板和电极信号调理电路Fig.5 Flexible board and electrode signal conditioning circuit
上位机软件运行于Windows环境下,利用虚拟仪器软件包LabWindows/CVI开发,用于完成数据显示、保存和分析功能;上位机与下位机之间通过USB进行数据传输。USB接口采用了Type-C接口标准,体积小巧,不存在正反插问题,具有较高的可靠性。上位机为USB主机端,通过USB总线发布传输命令;下位机是USB设备端,根据上位机的请求,将采集到的数据传输至上位机。
3.2 下位机软件
下位机的数据采集流程如图6所示。用定时器产生50kHz的激励信号,激励信号通过液体阻抗耦合到感知电极上,手指外皮的形变会引起感知电极上电压幅值的变化,通过测量电压的幅值变化即可获得手指外皮的形变信息。内部定时器产生一个1MHz的A/D转换触发信号,以此来触发对触觉传感器的数据采集。将采集的数据通过直接存储器访问(Direct Memory Access,DMA)传输到数据缓存区,提取基波信号幅值,并将基波分量数据通过DMA传输到数据存储区,然后将缓存区数据进行清除,重新采集下一轮基波分量数据。当接收到上位机的数据传输请求时,将数据存储区的数据通过USB传输至上位机。通过DMA实现外设与存储器之间或存储器与存储器之间的高速数据传输,无须CPU干预,有效节省了CPU的计算资源。
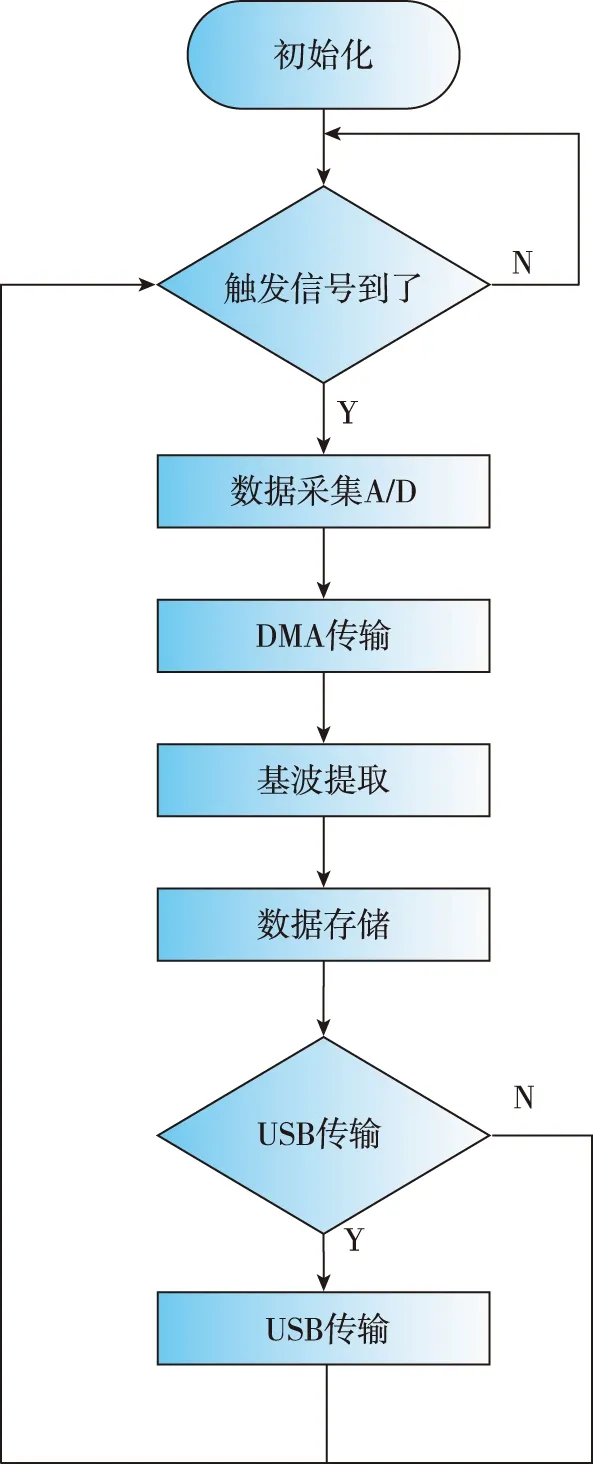
图6 数据采集流程图Fig.6 Data acquisition flow chart
3.3 USB传输
为提高数据传输效率,采用USB CDC类实现上位机和下位机的数据传输。CDC类是USB通信设备类(Communication Device Class)的简称,是USB2.0标准下的一个子类,定义了通信相关设备的抽象集合。USB CDC类是在主机和通信设备之间进行USB传输的标准协议,它支持多种多样的通信设备,包括调制解调器、数字和模拟电话、终端适配器、以太网适配器等。CDC类的配置描述符一般包含两个接口:一个是控制接口(Interface 0),另外一个是数据接口(Interface 1)。使用CDC类的另外一个优点是不需要为上位机软件开发专门的设备驱动程序。
在USB CDC类中,将许多必要的USB操作进行了封装,将USB设备映射为一个虚拟串口。这样,主机端(一般是PC机)便可以利用串口通信的方式与设备进行通信。但实际上,主机端与设备端在物理层面上是通过USB总线来进行通信的,与串口没有关系。在这一虚拟化过程中,起决定性作用的是对应的驱动,包含如何将每一条具体的虚拟串口操作对应到实际的USB操作上。因此,主机端与设备端的USB通信速率并不受所谓的串口波特率的影响,通信速率就是标准的USB2.0全速速度(12Mbit/s)。实际速率,取决于总线的实际使用率、驱动访问USB外设有效速率以及外部环境对通信本身造成的干扰率等因素。
ST官方的Cube库提供了USB协议栈,USB协议栈将所有USB类都抽象成了一个数据结构:USBD_ClassTypeDef。用户通过实例化这个数据结构来实现自己的USB类,并提供了一些调用接口来实现对USB传输的控制,例如设备的枚举、连接的建立,以及数据的发送与接收等。
3.4 上位机软件
上位机是在Labwindows/CVI编译环境下开发的,能够实现对测量数据的接收和实时显示。LabWindows/CVI是为C语言程序员提供的集成开发环境(IDE)。在此开发环境中,可以利用C语言及其提供的库函数实现程序的设计、编辑、编译、链接和调试。LabWindows/CVI具有功能强大的函数库,可用来创建采集数据和控制仪器的应用程序,可充分利用完备的软件工具进行数据采集、分析和显示。
上位机的软件设计采用了多线程机制。主线程是低优先级线程,可实现对数据的显示、处理和存储等操作。通信线程具有最高的优先级,每10ms可启动下位机数据传输功能。当接收到启动传输命令后,下位机将把在两次传输命令之间采集到的数据全部传输给上位机。
基于LabWindows/CVI环境,设计了易于操作的人机交互界面,以实现对通信的设置、连接的建立和数据的显示与保存等功能,可以实时显示由温度传感器采集到的温度数据、由压力传感器采集到的液体压强变化和各通道电极阵列电压的变化情况。仿生人工感知系统的可视化界面如图7所示,该系统实现了对温度、压力和14通道电极电压的实时显示和数据保存。

图7 上位机可视化界面Fig.7 Visualized interface of master computer
4 系统实验结果与分析
仿生手指及其触觉感知系统的体积较小,仅为20mm×27mm×80mm。信号采集与处理电路板只占据了很小的体积,实现了小型化的设计目标。仿生手指柔性皮肤的形变会引起电极之间耦合关系的变化,从而导致感知电极电压的改变,因此可以通过各电极的电压变化情况来判断物体与仿生手指的接触情况。
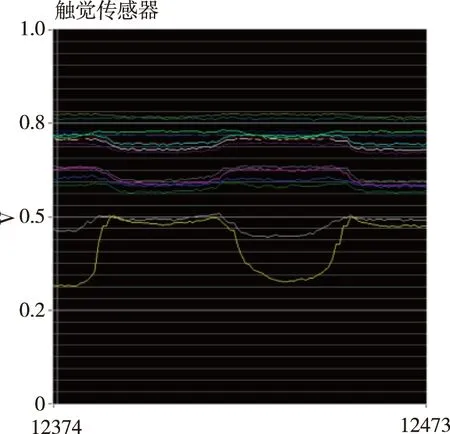
用大小不同(直径分别为2mm、5mm和10mm)的圆柱体端部,采用相似的挤压动作接触仿生位置,得到的电极阵列电压变化曲线如图8(a)所示。由图8(a)可以看出,当不同大小的物体接触到仿生手指时,各电极电压变化的大小存在明显差异,因此仿生手指可以判别被接触物体形状的大小。

(a) 仿生手指及其感知系统

(a) 不同物体按压手指
用同一物体、采用相似的挤压动作对仿生手指的不同部位进行往复按压,得到的电极阵列电压变化曲线如图8(b)~图8 (e)所示。由图8(b)~图8 (e)可以看出,对不同部位进行挤压,不同感知电极电压具有显著的不同的变化情况。因此,从电极的变化情况可以获悉物体与仿生手指接触部位的情况。

(b) 指骨及柔性板

(b) 按压手指前侧

(c) 按压手指后侧
(d) 按压手指指尖
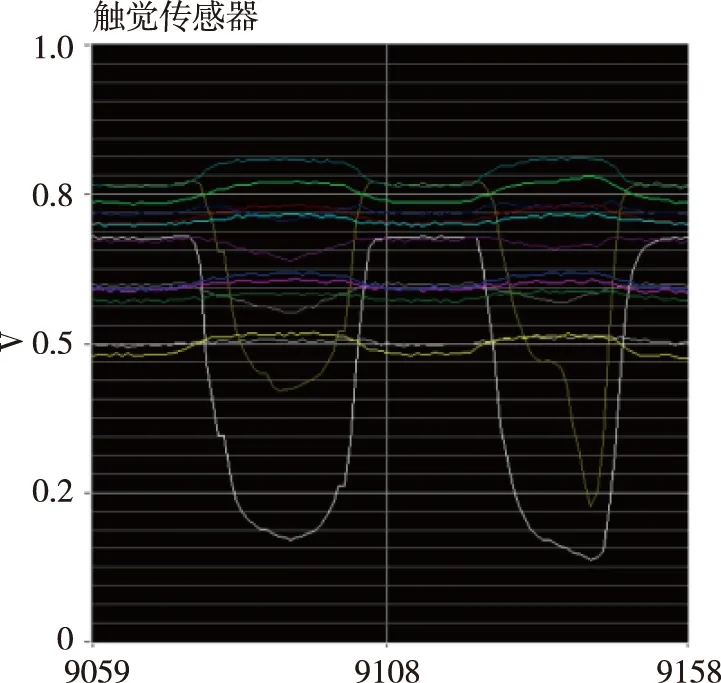
(e) 按压手指指腹 图8 仿生手指感知系统及其实验结果Fig.8 Bionic finger sensing system and experimental results
5 结 论
针对机器人仿生手指触觉传感器进行了研究,设计了仿生手指的机械结构、触觉感知硬件电路和数据采集与传输系统软件程序。通过自身装配的传感器,完成了环境感知任务,可实时测量温度、压力、三维力等信息。触觉感知系统以STM32F411微处理器为核心,采用了AD590热敏元件测量温度,采用了40PC015G2A压敏元件测量压力,设计了电极阵列以测量三维力,实现了手指传感器的触觉感知功能。针对手指传感器的小型化要求,硬件电路采用了双层电路板设计,其上层主要为单片机数据采集电路,下层主要是信号调理电路,上下电路板通过板对板接口进行连接;电极阵列和热敏元件设计在异形柔性板上,通过FPC与信号调理电路板相连。与其他相关方案相比,该方案结构简单、体积小巧、数据处理和传输速率快,可以有效应用于航空航天、医疗卫生和家庭服务等需要精细化操作的场景中。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
航天制造技术(2022年2期)2022-05-17
兵工学报(2022年1期)2022-03-14
现代企业(2021年11期)2021-12-08
海外星云(2021年6期)2021-10-14
科学大众·小诺贝尔(2020年4期)2020-07-20
高考·中(2019年6期)2019-09-10
红豆(2017年4期)2017-04-13
中学生数理化·高二版(2016年12期)2017-02-28
电脑爱好者(2015年17期)2015-09-10