采用注意力机制与改进YOLOv5的水下珍品检测
2021-11-24 12:36刘美怡陶志勇
农业工程学报 2021年18期
林 森,刘美怡,陶志勇
采用注意力机制与改进YOLOv5的水下珍品检测
林 森1,刘美怡2,陶志勇2
(1. 沈阳理工大学自动化与电气工程学院,沈阳 110159;2. 辽宁工程技术大学电子与信息工程学院,葫芦岛 125105)
海胆、海参、扇贝等水下珍品在渔业中具有重要意义和价值,最近,利用机器人捕捞水下珍品成为发展趋势。为了探测水下珍品的数量及分布情况,使水下机器人获得更加可靠的数据,该研究提出基于注意力机制与改进YOLOv5的水下珍品检测方法。首先,使用K-means匹配新的锚点坐标,增加多个检测尺度提升检测精度;其次,将注意力机制模块融入特征提取网络Darknet-53中获得重要特征;然后,利用Ghost模块的轻量化技术优势,引入由Ghost模块构成的Ghost-BottleNeck代替YOLOv5中的BottleNeck模块,大幅度降低网络模型的参数与计算量;最后,将IOU_nms修改为DIOU_nms以优化损失函数。采用基于实际水下环境建立的数据集,样本数量为781幅图像,按照9∶1的比例随机划分训练与测试集,对改进的网络进行验证。结果表明,该研究算法可获得95.67%平均准确率,相比YOLOv5算法可提升5.49个百分点,试验效果良好,研究结果可以为水下珍品的检测捕捉提供更加准确快捷的方法。
机器视觉;图像识别;水下珍品;轻量化;YOLOv5;注意力机制;多尺度
0 引 言
在农业养殖生产作业中,水下珍品(海参、海胆、扇贝等)一直深受渔民的喜爱。早期渔民们对其捕捞方式主要为撒网捕捞和人工抓取[1-2]两种形式。撒网捕捞虽然可以有效减少渔民成本,但是长期如此会严重损害海底的生态环境。人工抓取虽然解决了海底环境大范围被破坏的问题,但也给渔民带来更高的捕捞成本,同时增加了人身安全隐患。近年来,中国海洋科技水平不断提高,渔业、水产养殖等海洋经济也愈发依赖水下目标探测技术的发展。目前,有部分研究者把基于卷积神经网络的目标检测框架应用到渔业生产中,获得了一定效果[3-5]。
传统目标检测中根据检测对象的颜色、纹理和边缘等特征进行识别。如Hsiao等[6]提出一种基于稀疏表示分类(Sparse Representation-based Classification,SRC)的最大概率局部排序方法,称为SRC-MP,用于实际鱼类识别。特征面和鱼面通过鱼类数据库提取特征数据,采用特征空间维数和部分排序值两个参数对方案进行优化,识别率达到81.8%。Fabic等[7]利用斑点计数和形状分析从水下视频序列中进行鱼类检测,采用预处理使珊瑚变黑进一步去除珊瑚背景,使用Canny边缘检测来提取鱼类轮廓。吴一全等[8]提出一种基于Krawtchouk矩、灰度共生矩阵、蜂群优化多核最小二乘支持向量机的识别方法,可以快速准确地识别淡水鱼的种类,对5种淡水鱼识别精度均达83.33%以上。崔尚等[9]提出基于Sobel改进算子的海参图像识别研究,采用直方图均衡对图像进行预处理,利用Sobel改进算子将增强后的图像进行分割处理,经过多次膨胀、腐蚀处理和小目标移除算法处理,得到只含有海参目标的二值化图像。马国强等[10]提出改进的K-均值聚类算法可以精准识别人工养殖的石斑鱼,该算法在输入图像清楚和干扰小等情况下分割准确率可以达到98%。此类方法识别效果较好,但通常仅能检测单一目标且需要人工设计算子进行特征提取,工作量较大。
近年来,越来越多的深度学习方法被应用于水下目标检测。李艳君等[11]提出一种立体视觉下动态鱼体尺寸测量方法,该研究使用双目立体视觉技术获取三维信息,通过Mask-RCNN(Mask-Region Convolution Neural Network)网络进行鱼体检测与精细分割,试验平均相对误差分别在4.7%和9.2%左右。董鹏等[12]提出一种水下海参自动检测与尺寸测量的方法,其在左目矫正图像上,利用预先训练的YOLOv3海参检测模型,进行海参自动检测和感兴趣区域定位,所提方法在0.5~1.5 m范围内平均误差为1.65%。赵德安等[13]采用优化的Retinex算法提高了图像对比度,增强图像细节,利用卷积神经网络YOLOv3识别出河蟹,准确率为96.65%。郭祥云等[14]提出一种基于深度残差网络的水下海参实时识别算法,采用颜色变换方法进行数据增强,该方法具有较高识别准确率,可达到97.25%。Li等[15]改进Faster R-CNN网络结构,提出适用于水下鱼类目标检测的轻型R-CNN,准确率可达89.95%。徐建华等[16]提出一种基于YOLOv3算法的目标识别模型。通过降采样重组、多级融合、优化聚类候选框、重新定义损失函数等方式优化网络结构,水下目标识别的准确率为75.1%。王小宇等[17]提出了适用于水下目标检测识别场景的卷积神经网络结构,该方法水下目标识别准确率要高于传统卷积神经网络和高阶统计量特征的传统方法,可达到91.7%。Mandal等[18]通过Faster R-CNN与3个分类网络(ZFNet、CNN-M和VGG-16)相结合,进一步对50种鱼类和甲壳类动物进行检测,其平均准确率为82.4%。Chuang等[19]基于完全无监督的特征学习以及错误弹性分类器提出水下鱼类识别框架,可以较好地识别不同环境下的鱼类,平均准确率为92.1%。Luo等[20]利用人工神经网络去除图像中的噪音并准确识别鱼群,准确率为89.6%。
以上基于卷积神经网络的方法检测单一品种时,准确率较高,但针对多品种检测时效果不理想,平均准确率较低。为了解决上述问题,实现水下珍品的精确捕捞,在YOLOv5的基础上提出一种基于注意力机制与改进YOLOv5的水下珍品检测方法,称为CG-YOLOv5。本文方法的优势主要在于:1)在特征提取网络Darknet-53上融合注意力机制(Convolutional Block Attention Module,CBAM)结构,提升特征提取网络性能;2)使用K-means匹配新的锚点坐标,将YOLOv5算法中的3个检测尺度扩展为4个,提高模型对水下目标的检测精度;3)利用Ghost模块的轻量化技术优势,引入由Ghost模块构成的Ghost-BottleNeck代替YOLOv5中的BottleNeck模块,大幅度降低网络模型的参数与计算量。本文算法针对多品种检测提高平均准确率,可通过大量水下珍品图像检测试验进行验证,为后续的现代化珍品捕捞提供参考。
1 理论基础
1.1 YOLOv5算法原理
YOLOv5具有速度快、灵活性高的特点,网络结构主要包括Darknet-53主干网络、路径聚合网络(Path Aggregation network,PANet)[21],如图1所示。
主干网络采用CSP1_结构,主要包括两个分支,分支一由个Bottleneck模块串联,分支二为卷积层,然后两个分支拼接到一起,使网络深度增加,特征提取能力大幅增强。
PANet结构是由卷积操作、上采样操作、CSP2_X构成的循环金字塔结构,可以使图像不同特征层之间相互融合,以进行掩模预测,经非极大值抑制(Non-Maximum Suppression,NMS)[22]获得最终预测框。
1.2 注意力机制模块

为了有效提取检测目标的轮廓特征,获取检测目标的主要内容,引入通道注意力模块,其计算方法如下

为了精准定位检测目标的位置,提高目标检测准确率,引入空间注意力模块关注重点特征,其计算方法如下

1.3 Ghost模块
本文基于Ghost模块的轻量化优势,提出Ghost-BottleNeck模块,如图2所示,该模块类似于ResNet[23]中的基本剩余块,由两个堆叠的Ghost模块组成。左半部分充当Ghost-BottleNeck的扩展层,用于增加通道数量,从而增加特征维度,右半部分是为减少特征维度使其与输入一致,通过跳跃连接将左右两部分的输入与输出相加,可以清晰的看到左右两部分的区别在于左半部分引入了Relu激活函数,目的是防止在输入数据后网络向后传播的过程中产生梯度消失现象。右半部分没有引入Relu激活函数的原因是:经过Relu激活函数后下一层和前一层输入数据的分布不同,从而需要不断适应不同的输入分布,导致网络训练速度降低。
2 CG-YOLOv5水下目标检测算法
虽然YOLOv5致力于水下目标检测,但在复杂水下环境中,许多目标区域信息容易丢失,不利于水下珍品的检测。为了提高检测精度,提出CG-YOLOv5水下目标检测算法,参数如表1所示,模型如图3所示。本文对于该模型的主要改进为:将注意力机制CBAM、Ghost-BottleNeck与DarkNet-53融合组成新的特征提取网络CGDarkNet-53;使用K-means匹配新的锚点坐标,将YOLOv5检测尺度扩展为4个,提高水下目标检测精度。本文采用CGDarkNet-53作为CG-YOLOv5的主干网络,与YOLOv5相比,CG-YOLOv5仅有一种CSP_X结构,可将梯度变化完整的集成到特征图中,加强网络特征融合能力,从而保证准确率。CG-YOLOv5增加一个新的检测尺度用于提升目标检测精度,即网络层15输出得到的Yolo head1。
2.1 CGDarkNet-53主干网络
为了抑制网络中无用特征,CGDarkNet-53引入CBAM增加网络深度并提升特征提取能力。CBAM利用通道注意力机制和空间注意力机制结合的方法对特征向量进行筛选加权,其中通道注意力机制重点描述检测目标的内容,空间注意力机制重点描述检测目标的位置,通过两者结合来体现重要特征信息,弱化一般特征信息,进一步对水下珍品进行更加精确的定位和识别。Ghost-BottleNeck具有更简易的线性运算,在轻量化的同时保持准确性,与CBAM结合生成CGCSP_单元,如图3所示,Ghost-BottleNeck右侧增加Leaky Relu函数,避免负值输入的梯度为0,进而解决部分神经元不学习的问题,更充分地学习图像特征。
2.2 多尺度输入
YOLOv5算法使用K-means对数据集中的bounding box聚类以获取合适锚点,锚点框的选取会直接影响目标检测的效果。为进一步提高检测精度,需要对水下数据集的标签重新聚类获取新的锚点。CG-YOLOv5将YOLOv5中的3个检测尺度扩展为4个检测尺度,在执行多尺度检测时,经过15层得到第一个检测尺度Yolo head1。将所得Yolo head1上采样的结果与第5层进行特征融合,得到第二个检测尺度Yolo head2。接着将Yolo head2进行卷积运算与Yolo head1进行特征融合,得到第三个检测尺度Yolo head3。最后将Yolo head3进行卷积运算与第11层进行特征融合,得到第4个检测尺度Yolo head4。因此,CG-YOLOv5具有更好检测不同尺度目标的性能。

表1 网络参数
2.3 损失函数


式中IoU表示为预测框重叠区域,表示预测框,表示真实框,表示、最小包围框。
在目标检测的后处理过程中,针对很多目标框的筛选,通常需要NMS操作。YOLOv4针对边界框中心点的位置信息,在CIOU_Loss[25]的基础上采用DIOU_nms,在重叠目标的检测中,DIOU_nms的效果优于传统的NMS。本文采用加权NMS的方式,在同样的参数情况下,将NMS中IOU_nms修改为DIOU_nms,对于某些遮挡重叠的目标,除了考虑预测框重叠区域的IoU外,还考虑两个预测框中心点之间的距离,有效提升检测精度。
3 结果与分析
3.1 试验平台
试验基于Ubuntu18.04、Python3.7.7和PyTorch1.6.0搭建的深度学习框架,试验相关硬件配置和模型参数如表2所示。CG-YOLOv5可以自适应图片缩放,选取640×640大小的图像作为输入,可获得等比例大小的特征图作为检测尺度。通过多次试验得出,学习率选取0.01可以较快达到局部收敛,批量大小为16时训练速度较快。

表2 试验相关硬件配置和模型参数
3.2 试验数据集
本文试验采用湛江水下机器人比赛数据集(http://uodac.pcl.ac.cn/),该数据集共有三个类别:海参、海胆、扇贝,数据集中的图像是由水下机器人在真实海底环境中拍摄的视频通过按帧截取所得,其图像分辨率为1 920×1 080像素,部分图像由于拍摄角度或没有水下珍品被人工删除,挑选后的数据集共包括781张图像,以9∶1比例随机划分训练集和测试集,抽样后再次统计标注信息、类别比例和大小分布,使训练集与验证集分布相似,达到划分目的。为了满足试验所需要求,首先,把数据集转变成VOC2007格式;然后,借助Lableimg软件对转换的数据集进行标注,手动设置类别为Sea cucumber(海参)、Sea urchin(海胆)、Scallop(扇贝)三类。此外,为体现算法鲁棒性,即可在复杂水下环境中进行珍品的检测抓捕,数据集中图像为原始图像,没有进行任何清晰化等预处理。
3.3 评价指标
为了验证提出模型的有效性,从定性和定量两方面进行评估。对于定性评价,通过对比CG-YOLOv5和比较方法的检测图像差异来评估模型性能,即比较目标框的定位精确度,以及是否存在漏检、误检情况。定量评价方面,主要选取的指标为:准确率(Precision,)、召回率(Recall,)、平均准确率(Average Precision,AP)、平均精度均值mAP(mean Average Precision)。公式如下

3.4 结果与分析
3.4.1 定性结果与分析
为了更直观的体现CG-YOLOv5的性能,试验中随机抽取图像,将本文算法与SSD[26]、Faster R-CNN[27]、YOLOv4[28]、YOLOv5、PP-YOLO[29]、PP-YOLOv2[30]、YOLOX[31]等目标检测算法进行对比,8种检测算法均在同一试验平台进行训练与测试,算法结果对比如图4所示。
由图4观察可知CG-YOLOv5有效降低了漏检,提高了精度。如Image3所示,SSD算法针对于小目标的检测效果较差,图像上方所示的海胆并未被准确检测;Image2中,Faster R-CNN在小目标检测上优于SSD算法,但对海参的检测效果并不好,Image3中,图像右下方海参存在漏检情况,Image1中,海参检测正确但仅检测出某一小部分;YOLOv4和PP-YOLO对海胆检测效果较差,如Image3和Image4上方海胆未被准确检测;YOLOv5的海参检测效果优于Faster R-CNN算法,对小目标检测优于SSD算法,但也存在误检和漏检的情况,如Image4右上方扇贝存在误检;PP-YOLOv2未准确检测海胆和扇贝,如Image3和Image4左上方,Image1和Image2右上方均存在漏检情况;YOLOX在Image1上方漏检海胆,Image3左侧漏检海参;与其他算法相比,CG-YOLOv5成功检测出Image2中下方海参和Image3中左上方较小海参和海胆,不但检测精度较高,而且能够适应复杂的水下环境,提升小目标和被遮挡目标的检测率,鲁棒性强。
3.4.2 消融试验
为了更好地验证本文算法的有效性,进行了消融试验,共验证8组网络,同样使用湛江水下机器人比赛数据集进行测试,试验模型客观评价对比结果如表3所示,加粗字体为算法最优值。
模型的网络复杂度可以用参数量(Parameters)和浮点运算量(Floating Point operations,FLOPs)来衡量,两者共同描述了数据经过复杂网络的计算量,参数量和浮点运算量数值越小,网络复杂度越低。如表3所示,采用Ghost模块的检测网络,其参数量和浮点运算量均低于其他相同参数条件下未采用Ghost模块的检测网络,从而说明Ghost模块具有轻量化作用,可有效提升网络性能。
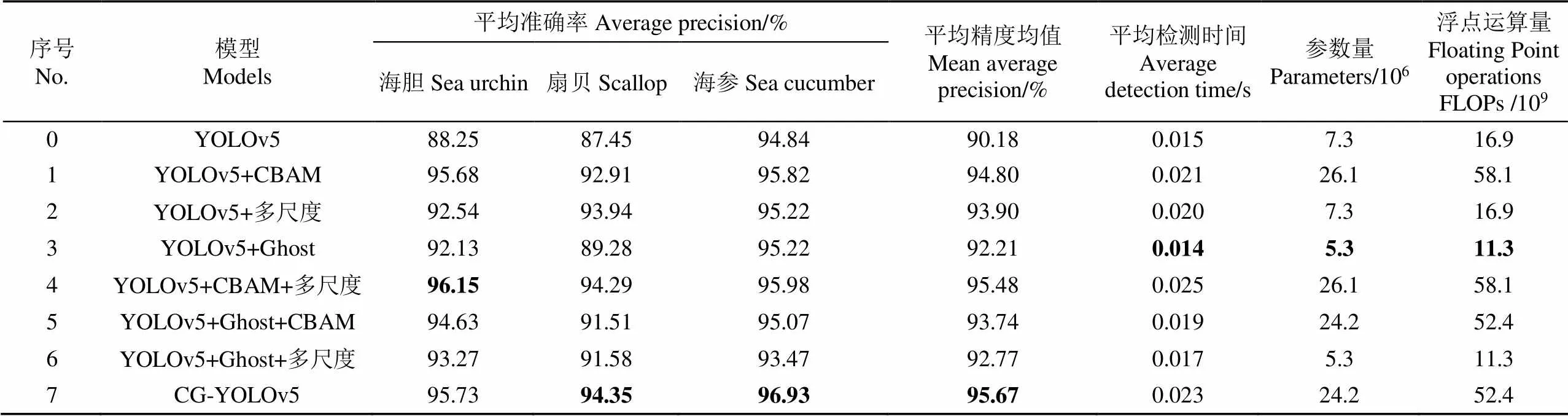
表3 消融试验
由表3数据可知,引入CBAM的目标检测网络相比于YOLOv5网络mAP值提升了4.62个百分点,检测时间增加0.006 s,虽检测时间有所增加,但精度较高,说明注意力机制网络能抑制无用特征,有效提高CNN性能。将YOLOv5的3个检测尺度扩展为4个,可提升模型检测精度,mAP值提升3.72个百分点。引入Ghost- BottleNeck替代BottleNeck可降低网络参数量和计算量,mAP提升2.03个百分点。试验结果表明,本文提出的每个措施在性能方面均有所提升,CG-YOLOv5与YOLOv5相比mAP值提升5.49个百分点,海胆、扇贝、海参的平均准确率提升7.48、6.90、2.09个百分点。虽然检测效率有少量降低,但检测精度得到较大的提升。
3.4.3 定量结果与分析
CG-YOLOv5算法检测结果的P-R曲线如图5所示,直角坐标系中横坐标是召回率,纵坐标是准确率。通过计算坐标系中P-R曲线下方部分面积便可以获得该类别的AP值,海参、扇贝和海胆三种类别的AP值依次为96.93%、94.35%、95.73%,未完全识别主要原因为复杂的水下环境对检测造成干扰,因此后续工作将考虑增加图像的预处理,用于提升图像的清晰率和识别率。
本文算法与SSD、Faster R-CNN、YOLOv4、YOLOv5、PP-YOLO、PP-YOLOv2、YOLOX检测算法的性能指标对比结果如表4所示,加粗字体为算法最优值,从表中数据可知,CG-YOLOv5算法可以获得更高的检测精度。在时间上,100张图片平均检测时间虽高于YOLOv5和SSD,但相比其他5种算法,具有良好的检测速度,以牺牲较少的时间为代价,获取更高的精度。因此,结合精度和速度综合考虑,本文算法更适合完成水下机器人对珍品的检测任务。
根据上述结果分析,与其他7种算法相比,CG-YOLOv5算法在性能上具有更高的优势。改进模型更加充分利用了低层次的特征信息,进而提升在小目标检测方面的检测率;同时模型的注意力机制缩减无用特征对模型的干扰和影响,改善了遮挡目标检测效果,较大幅度提高模型的性能。
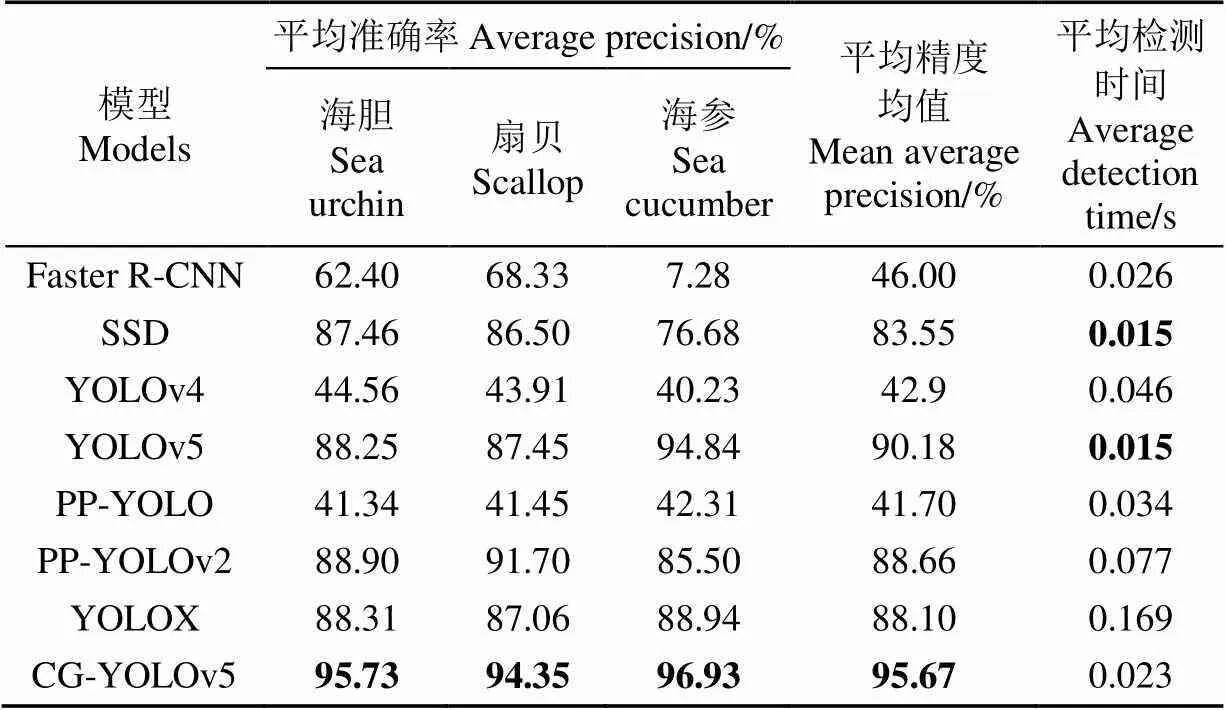
表4 不同检测算法性能指标对比
4 结 论
本文提出基于注意力机制与改进YOLOv5的水下珍品检测方法,以便渔民利用水下机器人对水下珍品进行识别和捕捞。首先采用注意力机制CBAM对YOLOv5的特征提取网络进行改进。然后,利用K-means匹配新的锚点坐标,将YOLOv5算法中的3个检测尺度扩展为4个,提高了模型对水下目标的检测精度。最后,利用Ghost的优势,引入Ghost-BottleNeck代替YOLOv5中的BottleNeck模块,降低YOLOv5卷积神经网络的计算成本。
试验结果表明,所提出的CG-YOLOv5算法平均精度均值可以达到95.67%,具有更好的准确性,故应用于水下珍品的检测时具有良好成效,与SSD、Faster R-CNN、YOLOv4、YOLOv5、PP-YOLO、PP-YOLOv2、YOLOX算法相比,本文算法平均检测时间为0.023s ,检测速度较快。结合速度和精度综合考虑,具有较高应用价值,为后续的自动化珍品捕捞提供参考。
[1] Choe S, Ohshima Y. On the morphological and ecologica differences between two commercifl forms, “Green”and “Red”, of the Japan common sea cucumber, Stichopus japonicus Selenka[J]. Bull Jpn Soc Sci Fish, 1961, 27: 97-106
[2] Mitsunaga N, Matsumura S. Growth and survival of hatchery produced juveniles of sea cucumber Apostichopus japonicus in different size[J]. Bull Nagasaki Prefect Inst Fish, 2004, 30: 7-13.
[3] 郑一力,张露. 基于迁移学习的卷积神经网络植物叶片图像识别方法[J]. 农业机械学报,2018,49(S):354-359.
Zheng Yili, Zhang Lu. Image recognition method of plant leaves based on transfer learning by convolutional neural network[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S): 354-359. (in Chinese with English abstract)
[4] 薛金林,闫嘉,范博文. 多类农田障碍物卷积神经网络分类识别方法[J]. 农业机械学报,2018,49(S1):42-48.
Xue Jinlin, Yan Jia, Fan Bowen. Convolutional neural network classification and recognition method for multi-class farmland obstacles[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 42-48. (in Chinese with English abstract)
[5] 姜红花,王鹏飞,张昭,等. 基于卷积网络和哈希码的玉米田间杂草快速识别方法[J]. 农业机械学报,2018,49(11):30-38.
Jiang Honghua, Wang Pengfei, Zhang Zhao, et al. Quick recognition method of weeds in corn field based on convolutional network and hash code[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11): 30-38. (in Chinese with English abstract)
[6] Hsiao Y H, Chen C C, Lin S I, et al. Real-world underwater fish recognition and identification, using sparse representation[J]. Ecological informatics, 2014, 23: 13-21.
[7] Fabic J N, Turla I E, Capacillo J A, et al. Fish population estimation and species classification from underwater video sequences using blob counting and shape analysis[C]// 2013 IEEE International Underwater Technology Symposium (UT). IEEE, 2013: 1-6.
[8] 吴一全,殷骏,戴一冕,等. 基于蜂群优化多核支持向量机的淡水鱼种类识别[J]. 农业工程学报,2014,30(16):312-319.
Wu Yiquan, Yin Jun, Dai Yimian, et al. Identification method of freshwater fish species using multi-kernel support vector machine with bee colony optimization[J]. Transactions of the Chinese Society for Agricultural Engineering (Transactions of the CSAE), 2014, 30(16): 312-319. (in Chinese with English abstract)
[9] 崔尚,段志威,李国平,等. 基于Sobel改进算子的海参图像识别研究[J]. 电脑知识与技术:学术交流,2018,14(22):145-146.
Cui Shang, Duan Zhiwei, Li Guoping, et al. Research on sea cucumber image recognition based on Sobel improved operator[J]. Computer Knowledge and Technology: Academic Exchange, 2018, 14(22): 145-146. (in Chinese with English abstract)
[10] 马国强,田云臣,李晓岚. K-均值聚类算法在海水背景石斑鱼彩色图像分割中的应用[J]. 计算机应用与软件,2016,33(5):192-195.
Ma Guoqiang, Tian Yunchen, Li Xiaolan. Application of K-means clustering algorithm in color image segmentation of grouper on sea water background[J]. Computer Applications and Software, 2016, 33(5): 192-195. (in Chinese with English abstract)
[11] 李艳君,黄康为,项基. 基于立体视觉的动态鱼体尺寸测量[J]. 农业工程学报,2020,36(21):220-226.
Li Yanjun, Huang Kangwei, Xiang Ji. Measurement of dynamic fish dimension based on stereoscopic vision[J]. Transactions of the Chinese Society for Agricultural Engineering (Transactions of the CSAE), 2020, 36(21): 220-226. (in Chinese with English abstract)
[12] 董鹏,周烽,赵悰悰,等. 基于双目视觉的水下海参尺寸自动测量方法[J]. 计算机工程与应用,2021,57(8):271-278.
Dong Peng, Zhou Feng, Zhao Congcong, et al. Automatic measurement method of underwater sea cucumber size based on binocular vision[J]. Computer Engineering and Application, 2021, 57(8): 271-278 (in Chinese with English abstract)
[13] 赵德安,刘晓洋,孙月平,等. 基于机器视觉的水下河蟹识别方法[J]. 农业机械学报,2019,50(3):151-158.
Zhao Dean, Liu Xiaoyang, Sun Yueping, et al. Underwater crab recognition method based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3): 151-158. (in Chinese with English abstract)
[14] 郭祥云,胡敏,王文胜,等. 基于深度学习的非结构环境下海参实时识别算法[J]. 北京信息科技大学学报:自然科学版,2019(3):27-31.
Guo Xiangyun, Hu min, Wang Wensheng, et al. Real time identification algorithm of sea cucumber in unstructured environment based on deep learning[J]. Journal of Beijing University of Information Technology: Natural Science Edition, 2019(3): 27-31 (in Chinese with English abstract)
[15] Li X, Tang Y, Gao T. Deep but lightweight neural networks for fish detection[C]//OCEANS 2017-Aberdeen. IEEE, 2017: 1-5.
[16] 徐建华,豆毅庚,郑亚山. 一种基于YOLO-V3算法的水下目标识别跟踪方法[J]. 中国惯性技术学报,2020,28(1):129-133.
Xu Jianhua, Dou Yigeng, Zheng Yashan. An underwater target recognition and tracking method based on YOLO-V3 algorithm[J]. Journal of Chinese Inertial Technology, 2020, 28(1): 129-133. (in Chinese with English abstract)
[17] 王小宇,李凡,曹琳,等. 改进的卷积神经网络实现端到端的水下目标自动识别[J]. 信号处理,2020,36(6):958-965.
Wang Xiaoyu, Li Fan, Cao Lin, et al. Improved convolutional neural network to realize end-to-end automatic recognition of underwater targets[J]. Signal Processing, 2020, 36(6): 958-965. (in Chinese with English abstract)
[18] Mandal R, Connolly R M, Schlacher T A, et al. Assessing fish abundance from underwater video using deep neural networks[C]// 2018 International Joint Conference on Neural Networks (IJCNN). Rio de Janeiro: IEEE, 2018: 1-6.
[19] Chuang M C, Hwang J N, Williams K. A feature learning and object recognition framework for underwater fish images[J]. IEEE Transactions on Image Processing, 2016, 25(4): 1862-1872.
[20] Luo S, Li X, Wang D, et al. Automatic fish recognition and counting in video footage of fishery operations[C]// 2015 International Conference on Computational Intelligence and Communication Networks (CICN). Jabalpur: IEEE, 2015: 296-299.
[21] Liu S, Qi L, Qin H, et al. Path aggregation network for instance segmentation[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City: IEEE, 2018: 8759-8768.
[22] Neubeck A, Van Gool L. Efficient non-maximum suppression[C]// 18th International Conference on Pattern Recognition (ICPR'06). Hong Kong: IEEE, 2006, 3: 850-855.
[23] He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas: IEEE, 2016: 770-778.
[24] Rezatofighi H, Tsoi N, Gwak J Y, et al. Generalized intersection over union: A metric and a loss for bounding box regression[C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Long Beach: IEEE, 2019: 658-666.
[25] Zheng Z, Wang P, Liu W, et al. Distance-IoU loss: Faster and better learning for bounding box regression[C]// Proceedings of the AAAI Conference on Artificial Intelligence (AAAI). New York Hilton Midtown: 2020: 12993-13000.
[26] Liu W, Anguelov D, Erhan D, et al. Ssd: Single shot multibox detector[C]// European Conference on Computer Vision. Amsterdam: Springer, Cham, 2016: 21-37.
[27] Ren S, He K, Girshick R, et al. Faster r-cnn: Towards real-time object detection with region proposal networks[J]. Advances in Neural Information Processing Systems, 2015, 28: 91-99.
[28] Ghiasi G, Cui Y, Srinivas A, et al. Simple copy-paste is a strong data augmentation method for instance segmentation[C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2021: 2918-2928.
[29] Zheng Z, Zhao J, Li Y. Research on Detecting Bearing-Cover Defects Based on Improved YOLOv3[J]. IEEE Access, 2021, 9: 10304-10315.
[30] Li J, Zhang Z, Tian Y, et al. Target-Guided Feature Super-Resolution for Vehicle Detection in Remote Sensing Images[J]. IEEE Geoscience and Remote Sensing Letters, 2021: 1-5.
[31] Zhu X, Lyu S, Wang X, et al. TPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone-captured Scenarios[C]// Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021: 2778-2788.
Detection of underwater treasures using attention mechanism and improved YOLOv5
Lin Sen1, Liu Meiyi2, Tao Zhiyong2
(1.,,110159,; 2.,,125105,)
Underwater treasures, such as sea urchins, sea cucumbers, and scallops, have always been preferred in fish production, due mainly to the high value-added industry. However, two conventional approaches, including net fishing and manual catching, cannot meet the application requirements of rapid detection in the actual large-scale cultivation in modern agriculture, particularly on time-consuming, labor-intensive, and severe destruction of submarine environments in the early days. Alternatively, deep learning has widely been characterized by high resolution and fast speed in recent years. Therefore, it is a promising application potential to the target detection framework using the convolutional neural network in fishery production. It is also highly necessary to improve the detection performance in complex underwater environments. In this study, a YOLOv5 detection of underwater treasure was proposed using the attention mechanism, referred to as CG-YOLOv5, in order to provide a more accurate dataset for underwater robots. The main advantages were as follows: 1) DarkNet-53 was introduced the CBAM to deepen the network for the better performance of feature extraction, further to suppress the worthless features in the network. Specifically, the CBAM combined the channel and spatial attention to filter and weight the feature vectors. The channel attention focused mainly on what the detection target was, whereas, spatial attention was used to determine where the detection target was. As such, the prominent feature information was represented via two combined mechanisms, while weakening the general features. 2) The lightweight Ghost-Bottleneck module was introduced to replace the Bottleneck in YOLOv5. A simpler linear operation in Ghost-Bottleneck was utilized to maintain a higher accuracy with light weights. 3) New anchor points were obtained by clustering the labels of underwater datasets. A new detection scale was also added to the original three detections for higher detection accuracy. CG-YOLOv5 network mainly included CGDarknet-53 backbone network, Focus structure, Spatial Pyramid Pooling structure (SPP), and Path Aggregation Network (PANet). Focus served as a benchmark network with down sampling to change the input size of 640×640×3 to 320×320×32. Only one CSP structure was involved in the CG-YOLOv5 to integrate gradient changes completely into the feature map for feature fusion enhancement. The SPP structure was used to maximize the pooling of the feature layer. Four scales were utilized in the pooling layers with the pooling core sizes of 1×1, 5×5, 9×9, and 13×13, respectively. As such, the SPP effectively increased the perception field, while isolating significant contextual features. Furthermore, path aggregation networks were used to fuse different feature layers of an image. A specific dataset was also selected to verify the model using the actual underwater environment. There were 781 underwater images, 90% of which were employed as training datasets, and the rest were for testing. The experimental results demonstrated that the model fully met the requirement of detection and recognition for the treasures in complex underwater environments, compared with the current deep learning. The average accuracy was 95.67%. Compared with YOLOv5, the average precision of sea urchin, scallop and sea cucumber increased by 7.48, 6.90 and 2.09 percentage points, and mAP increased by 5.49 percentage points base point. Compared with other classical algorithms, the method has better accuracy and lower complexity. The finding can provide a more accurate and fast way to detect and capture aquatic products.
computer vision; image recognition; underwater treasures; lightweight; YOLOv5; attention mechanism; multi-scale
林森,刘美怡,陶志勇. 采用注意力机制与改进YOLOv5的水下珍品检测[J]. 农业工程学报,2021,37(18):307-314.doi:10.11975/j.issn.1002-6819.2021.18.035 http://www.tcsae.org
Lin Sen, Liu Meiyi, Tao Zhiyong. Detection of underwater treasures using attention mechanism and improved YOLOv5[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(18): 307-314. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.18.035 http://www.tcsae.org
2021-03-02
2021-09-09
国家重点研发计划(2018YFB1403303)
林森,博士,副教授。研究方向:图像处理与机器视觉,模式识别与人工智能等。Email:lin_sen6@126.com
10.11975/j.issn.1002-6819.2021.18.035
TP391
A
1002-6819(2021)-18-0307-08
猜你喜欢
意林彩版(2022年2期)2022-05-03
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
健康体检与管理(2021年10期)2021-01-03
金桥(2018年2期)2018-12-06
恋爱婚姻家庭(2018年33期)2018-07-22
中华奇石(2017年7期)2017-09-18
中华奇石(2017年6期)2017-09-05
中华奇石(2017年3期)2017-04-11