基于ITAE最优的ADRC参数静态优化方法
2021-11-24 05:08沈旭东
科学与生活 2021年18期
摘要:本文针对自抗扰控制器参数调整对经验依赖大,并未优化的问题。研究以ITAE最小作为系统参数整定的目标,结合ITAE最佳传递函数与线性自抗扰闭环传递函数,得到基于ITAE最佳的静态参数优化方法,从而优化自抗扰控制器参数的调整。
关键词:自抗扰控制;参数调整;ITAE
0引言
从控制工程角度,低阶控制器易于被接受和推广。工业控制中普遍采用的PID控制,就是典型的低阶控制器。因此,本文拟讨论二阶线性自抗扰控制,利用扩张状态观测器给出的系统输出、输出一阶导数和总扰动的估计值,构造控制律,优化其参数整定方法,以获得理想的控制性能。在二阶线性自抗扰控制的基础上,引入ITAE最优的思想,设计ITAE最佳的自抗扰控制参数静态优化方法。通过典型被控对象的传递函数,从数值仿真角度,检验所提参数整定方法的时域和频域性能。
1自抗扰控制
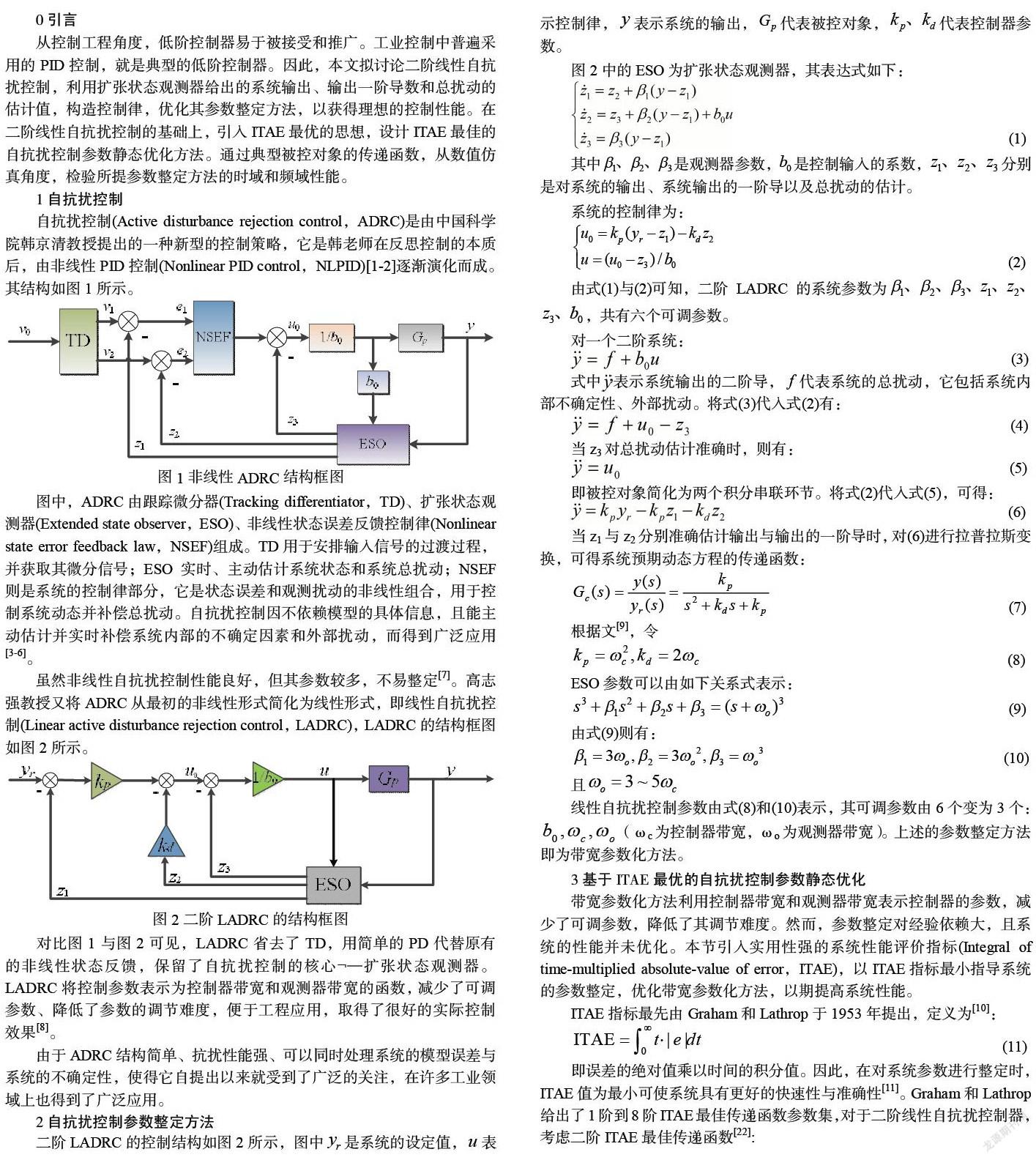
自抗扰控制(Active disturbance rejection control,ADRC)是由中国科学院韩京清教授提出的一种新型的控制策略,它是韩老师在反思控制的本质后,由非线性PID控制(Nonlinear PID control,NLPID)[1-2]逐渐演化而成。其结构如图1所示。
图中,ADRC由跟踪微分器(Tracking differentiator,TD)、扩张状态观测器(Extended state observer,ESO)、非线性状态误差反馈控制律(Nonlinear state error feedback law,NSEF)组成。TD用于安排输入信号的过渡过程,并获取其微分信号;ESO实时、主动估计系统状态和系统总扰动;NSEF则是系统的控制律部分,它是状态误差和观测扰动的非线性组合,用于控制系统动态并补偿总扰动。自抗扰控制因不依赖模型的具体信息,且能主动估计并实时补偿系统内部的不确定因素和外部扰动,而得到广泛应用[3-6]。
虽然非线性自抗扰控制性能良好,但其参数较多,不易整定[7]。高志强教授又将ADRC从最初的非线性形式简化为线性形式,即线性自抗扰控制(Linear active disturbance rejection control,LADRC),LADRC的结构框图如图2所示。
对比图1与图2可见,LADRC省去了TD,用简单的PD代替原有的非线性状态反馈,保留了自抗扰控制的核心¬—扩张状态观测器。LADRC将控制参数表示为控制器带宽和观测器带宽的函数,减少了可调参数、降低了参數的调节难度,便于工程应用,取得了很好的实际控制效果[8]。
由于ADRC结构简单、抗扰性能强、可以同时处理系统的模型误差与系统的不确定性,使得它自提出以来就受到了广泛的关注,在许多工业领域上也得到了广泛应用。
2自抗扰控制参数整定方法
二阶LADRC的控制结构如图2所示,图中 是系统的设定值, 表示控制律, 表示系统的输出, 代表被控对象, 代表控制器参数。
线性自抗扰控制参数由式(8)和(10)表示,其可调参数由6个变为3个: (ωc为控制器带宽,ωo为观测器带宽)。上述的参数整定方法即为带宽参数化方法。
3基于ITAE最优的自抗扰控制参数静态优化
带宽参数化方法利用控制器带宽和观测器带宽表示控制器的参数,减少了可调参数,降低了其调节难度。然而,参数整定对经验依赖大,且系统的性能并未优化。本节引入实用性强的系统性能评价指标(Integral of time-multiplied absolute-value of error,ITAE),以ITAE指标最小指导系统的参数整定,优化带宽参数化方法,以期提高系统性能。
因此,系统的可调参数在此时将变为
由此,线性自抗扰闭环传递函数经过ITAE最优传递函数标准化后,可使系统参数整定以ITAE最优为目标,改善系统的快速性与准确性。称这样的参数优化方法为静态优化方法。
4仿真研究
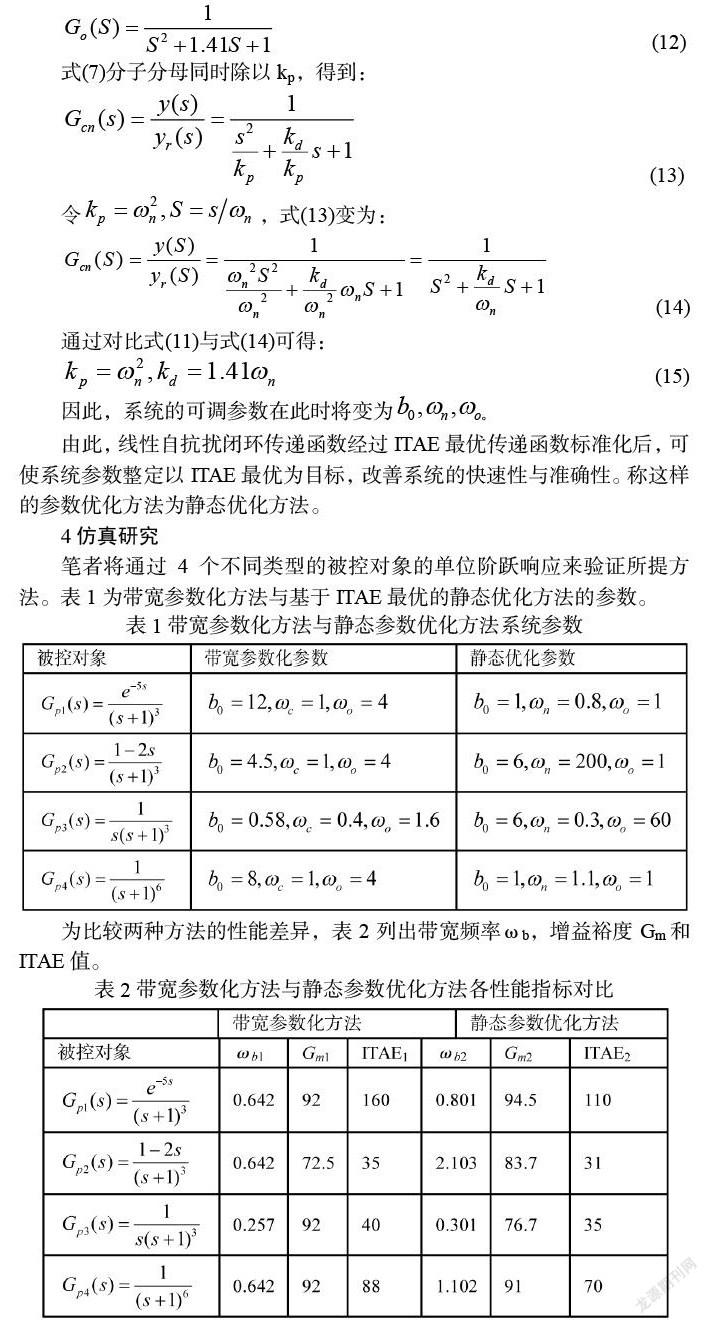
笔者将通过4个不同类型的被控对象的单位阶跃响应来验证所提方法。表1为带宽参数化方法与基于ITAE最优的静态优化方法的参数。
为比较两种方法的性能差异,表2列出带宽频率ωb,增益裕度Gm和ITAE值。
从表2可以看出,静态参数优化方法的ωb2均大于带宽参数化方法的ωb1,这表明通过基于ITAE最佳的静态参数优化方法获得的系统响应速度更快。此外,静态参数优化方法的Gm1和带宽参数化方法的Gm2比较接近,说明采用ITAE最优方法的系统稳定性基本不变。同时,静态参数优化方法的ITAE2小于带宽参数化方法的ITAE1,这证实了所提静态参数优化方法的ITAE指标更小。总之,从表2所列指标可以看出,基于ITAE的静态参数优化方法可提高系统的快速性与准确性。
5结论
本文研究的基于ITAE最有的ADRC参数静态优化方法通过仿真及各参数对比,验证了所提方法的可靠性。表明了所提方法在传统带宽参数化方法的基础上,不仅保证了系统的稳定性,在系统响应速度、系统的准确性方面得到了明显提升,可进一步为LADRC参数调整方法在实际应用提供指导思想。
参考文献
[1]韩京清.非线性PID控制器[J].自动化学报,1994,20(4):487-490.
[2]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.
[3]黄一,薛文超.自抗扰控制:思想、应用及理论分析[J].系统科学与数学,2012,32(10):1287-1307.
[4]Fu C, Tan W. Decentralised load frequency control for power systems with communication delays via active disturbance rejection[J]. Iet Generation Transmission & Distribution, 2018, 12(6):1397-1403.
[5]Sun Z, Zheng J, Man Z, et al. Sliding Mode-Based Active Disturbance Rejection Control for Vehicle Steer-by-Wire Systems[J]. 2018, 3(1):1-10.
[6]Zhang G, Wang G, Yuan B, et al. Active Disturbance Rejection Control Strategy for Signal Injection Based Sensorless IPMSM Drives[J]. IEEE Transactions on Transportation Electrification, 2017, PP(99):1-1.
[7]梁青,王传榜,潘金文,等.线性自抗扰控制参数b0辨识及参数整定规律[J].控制与决策,2015(9):1691-1695.
[8]Wang W, Guo J, Jiang Z, et al. Application of linear active disturbance rejection control for photoelectric tracking system[J]. High-tech communication, 2017, 23(3): 315-321.
[9]Gao Z. Scaling and bandwidth-parameterization based controller tuning[C]. Proceedings of American Control Conference, 2003, 4989-4996.
[10]Graham D, Lathrop R C. The synthesis of optimal transient response: Criteria and standard forms[J]. American Institute of Electrical Engineers Part II Applications & Industry Transactions of the, 1953, 72(5): 273-288.
[11]項国波.ITAE最佳调节[J].冶金自动化,1979(04):1-10.
作者简介
沈旭东(1994.08-),男,汉,贵州。研究生,研究方向:自抗扰控制,单位:贵州电子信息职业技术学院。