多机器人协同焊接在实践教学中的应用
2021-11-26 01:37周冰科高党寻姚启明王龙兵徐江波黄吉才
设备管理与维修 2021年19期
周冰科,高党寻,姚启明,王龙兵,徐江波,黄吉才
(清华大学基础工业训练中心,北京 100084)
0 引言
近年来焊接机器人技术得到了迅猛发展,在各行各业得到广泛的应用,如工业生产、航空航天、医学、深海探索、军事等领域。随着生产量和作业环境的不断变化,有些工作仅靠单机器人难以承担,需要通过多台机器人协同作业才能够完成。多机器人系统相比于单机器人系统有诸多优点,如多机器人系统适应环境能力强,环境发生变化时能自我调节;多机器人系统空间分布广,同时具有较好的时间分布性。通过多机器人之间的协同作业,多机器人系统可以可靠地完成单机器人无法完成的复杂任务,提高生产效率,因此多机器人协同作业越来越受到关注。
清华大学基础工业训练中心是清华大学进行工程训练教学的重要场所,在增强学生工程实践能力、提高综合素质、培养创新精神和创新能力方面开展了多项实践教学活动。成形制造实验室焊接分室是其重要组成部分。为了开阔学生眼界、掌握多种焊接工艺方法和体验先进焊接设备的魅力,2014 年实验室先后引进3 台库卡弧焊机器人建设多机器人弧焊工作站。
1 课程背景
焊接机器人是一种工业机器人,从事包括焊接和切割等焊割工作,主要由机器人和焊接设备组成。传统的焊接机器人工作站在实践教学中是通过学生人工输入焊点数据以及人工规划机器人焊接路径,焊接完成后需要学生人工更换焊件,无法实现焊接路径的重复性和均一性,也无法实现多台机器人焊接联动的效率最大化。要实现多机器人协同工作,不仅仅是机器人数量和功能上的增加,也要与PLC 控制系统等相匹配,才能实现多机器人协同工作。
多机器人工作站的建设主要是给学生一个更加真实的工程背景。通过完成一个典型结构件的焊接,可在实践教学过程中营造突出先进性、创新性和综合性为特点的工程实践特色,进而拓宽学生对焊接技术在自动化、机器人化发展方面的了解以及对数字化制造的认知。
2 课程建设和技术方案
2.1 课程建设
弧焊机器人实验室所采用的设备是工业级弧焊机器人,具有工业实现的各项功能。为了满足课程建设需求及工业级设备功能要求,在原有的双弧焊机器人工作站基础上再配置一台搬运机器人来完成自动上下料功能,组成多机器人工作站,再加装PLC 控制柜实现多机器人联动协同作业,满足工程实践教学条件。此外,还需解决多机器人系统集成与焊接程序的编写与运行,开发适用于本科生实践教学环节的程序。在实践教学中主要通过现场演示管板焊接过程进行教学活动。
2.2 多机器人工作站布局设计
多机器人工作站主要任务是对同一焊接区域采用两台或两台以上的焊接机器人进行协同焊接。实验室加购的搬运机器人与原有的双弧焊机器人在实验室内成倒“品”字形排列,左上为焊接机器人1(简称R1),右上为焊接机器人2(简称R2),下中为搬运机器人(简称R3)(图1)。
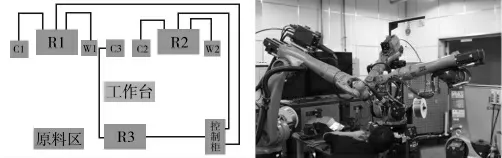
图1 多机器人工作站布局
2.3 多机器人协同作业控制程序设计
R3 为搬运机器人,它具有系统活动的所有信息(包括任务信息、环境信息、受控机器人信息等),可以对任务进行分解与分配,向各个受控机器人发布命令,组合多个机器人协作完成任务。受控机器人为两台焊接机器人R1、R2,它只与主控机器人进行信息交换,接收命令、完成任务。整个过程中的信号通信通过PLC 控制柜传输。
R3 在作业过程中只负责搬运和发布命令,首先它将焊接原料板和管分别从原料区搬运到工作台上,工作台上有气动夹紧装置。到位之后向R1、R2 两台焊接机器人发送信号,命令它们去焊接定位,R1、R2 点焊完成之后,将信号反馈给R3,R3 接收到信号后将工件搬运到空中(这一步的目的:一方面避开障碍物方便施焊,另一方面是工作台电磁阀为不锈钢材料,如果在电磁阀上施焊,过程中会有电流通过,可能导致电磁阀与工件连接或电磁阀损坏失效)就位后向R1、R2 发送焊接信号,R1、R2 接收到信号后进行自动焊接,完成后将信号反馈给R3,R3 收到信号后将焊完的工件搬运到原料区,R3 归位,完成管板焊接过程。运行路径如图2 所示。
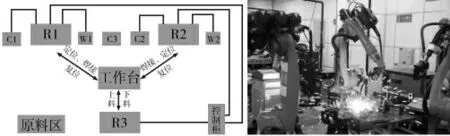
图2 多机器人协同作业运行路径及真实焊接场景
3 实践内容
3.1 材料及工艺参数
根据实践教学需要与平台支持,提供材料与工艺参考(表1)。
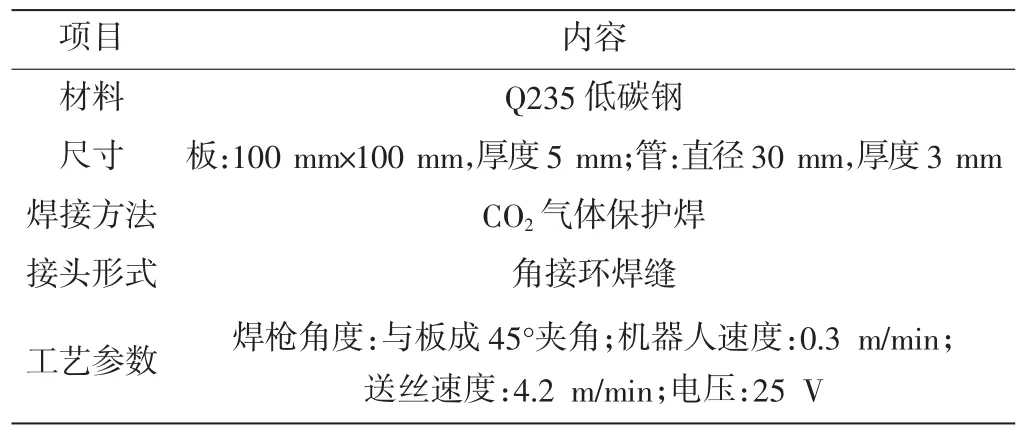
表1 材料及工艺参数
3.2 实施焊接
按照预先设定的程序和准备好的材料实施多机器人协同作业全自动焊接,经实验指导教师和学生实践操作使用后,与传统单机器人焊接对比有以下优势:
(1)焊接过程得到大量简化,不用频繁的人工定位与上、下料,提高了焊接效率。
(2)全自动焊接使得焊接质量得到显著提高,对实践教学效果有很大提升。
多机器人系统焊接效果如图3 所示。对于参加工程实践的学生来说,该系统更容易上手操作,有助于他们对焊接自动化技术有深刻的认识,得到学生的广泛好评。
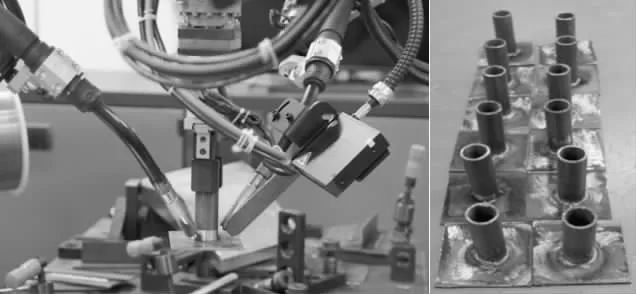
图3 管板焊接效果
4 结语
多机器人协同作业显著提高了弧焊机器人实践教学水准,体现了焊接技术在自动化和智能化发展的前沿状态,为弧焊机器人特色化实践教学提供了一个重要的硬件平台,提高了实践教学的前沿性和真实性,为培养本科生的工程实践能力及创新意识起到了积极作用。
猜你喜欢
今日农业(2022年16期)2022-11-09
汽车实用技术(2022年12期)2022-07-05
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
电脑报(2020年32期)2020-09-06
建材发展导向(2019年11期)2019-08-24
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
汽车与新动力(2014年5期)2014-02-27
中国火炬(2009年12期)2009-10-17