
数智化技术在住宅建筑施工管理中的深度应用
——以“吉宝静安中心项目”为例
2021-11-26 10:06赵堂君ZHAOTangjun
住宅科技 2021年11期
■ 赵堂君 ZHAO Tangjun
0 引言
近年来,VR 与AR 技术作为推动建筑行业数智化转型的底层强大驱动力,在不同层次的项目中进行了广泛的应用与尝试,展示出强大的项目多类型适应性、建筑工程领域的可行性与未来工程管理的开拓性。但在现阶段,仍普遍存在项目全生命周期内的技术使用落地性无重点研究、施工管理实用性偏弱的缺陷,其应用层面存在着使用阶段广度不足、实践性欠缺的问题。笔者就虚拟现实技术下的项目应用,对国内建筑面积在15 万 m2以上的商业、住宅项目进行了深度调研,发现该类型技术普遍应用于项目概念设计阶段与方案设计阶段,仅小部分应用于项目施工图深化阶段,而项目施工阶段的应用更少。基于此,本文以上海市吉宝静安中心项目为例,开创性地提出“数字孪生施工管理系统”,并基于其基本原理,总结该类技术在不同阶段应用中的优势与劣势,为其进一步数据化推广与应用提供参考依据。
1 项目概况
上海市吉宝静安中心项目由吉宝置业开发,位于静安寺北侧,距离CBD 中心1.5 km 辐射范围内,北临康定路,西临常德路,南临武定路,东侧则紧临静安豪苑。项目基坑西侧为地铁7 号线静安寺与昌平路站区间,距地铁区间隧道最近距离仅10.08 m,整体地下室埋深约19.53 m,塔楼为超高层建筑,高179.9 m。综上所述,本项目整体施工环节多样、专业管理复杂度高、各类风险源极多,尤其对周边居民维稳,以及防止周边房屋、地铁区间隧道与项目周边管线变形的保护要求极高(图1、2)。

图1 项目鸟瞰效果图

图2 项目工况鸟瞰图
针对上述工程重点、难点与各类风险源,在项目管理前期制定了数智化、智慧化工地施工管理策略,考虑基于虚拟现实环境下,将BIM 技术在建筑施工管理中的应用贯彻在整个项目周期之中,做到事前预判、事中管理、事后纠偏的“三大维度实时可控”的“数智化”管理策略,以此作为本项目管理的重中之重。
2 传统虚拟环境下BIM 技术的项目应用
为了更好地进行项目实践应用,笔者总计调研了14 个建筑面积超过15 万m2的项目,并对各项目虚拟环境下的数智化应用进行进一步梳理统计(表1),以针对性地为吉宝静安中心项目形成匹配度与可实施度更高的数智化技术应用策略。
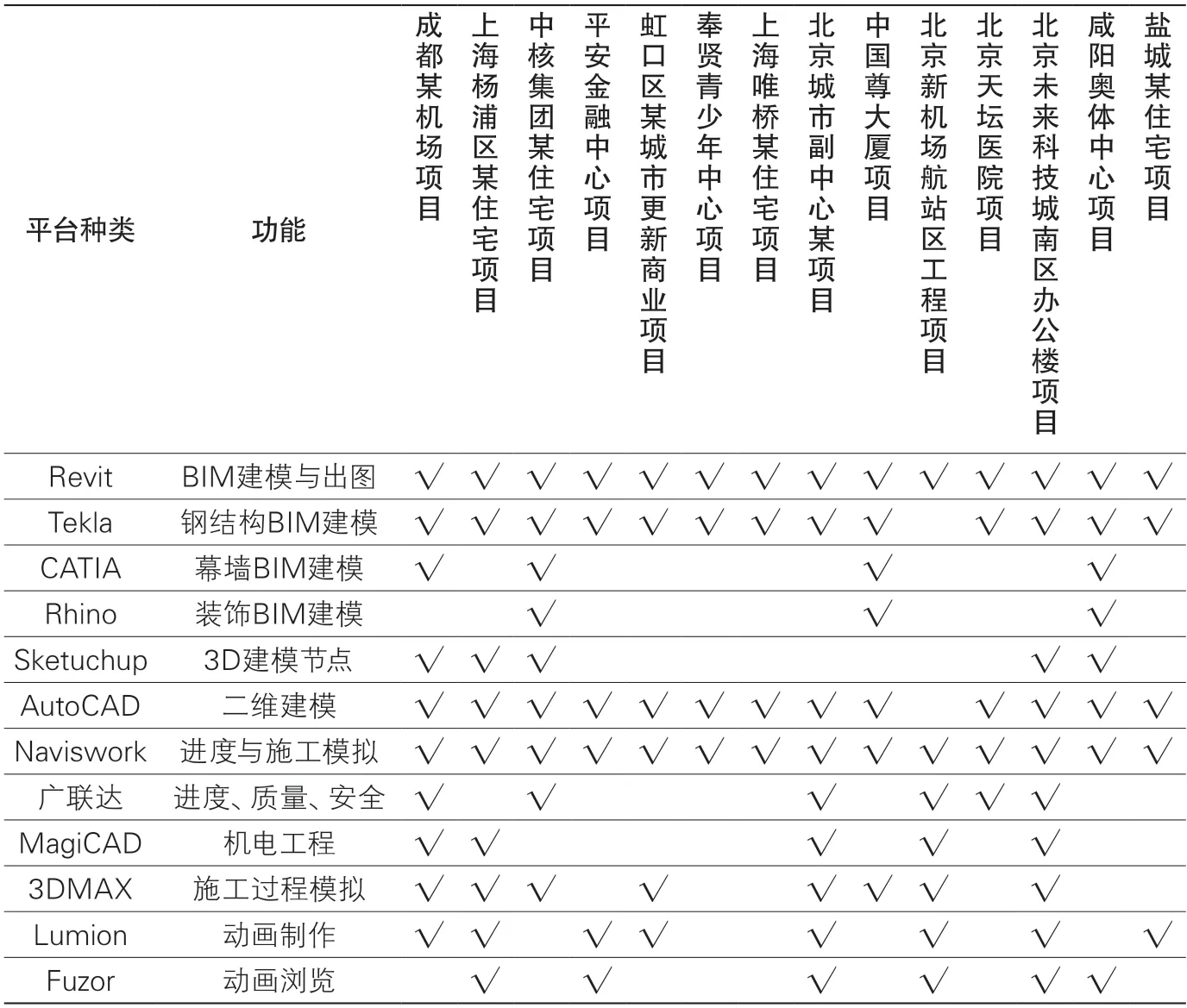
表1 全国大型项目数智化技术宏观应用统计表
(1)由宏观统计数据可以看出,随着近年来政府对相关技术的要求与推广,数智化技术在各个项目都有了进一步的应用。数据表明,各项目对于VR 与BIM 技术的应用积极性提高,尤其在方案阶段、设计阶段的VR 与BIM 模拟占比最高;但在施工阶段使用占比较低,使用最普及的功能仍然是碰撞检查。
(2)从微观数理统计上看,除了碰撞检查外,生产管理类功能应用的比例快速提高(表2);尤其是诸如质量管理、进度控制、安全管理等排名上升较多,说明基于虚拟现实环境下的数智化施工管理技术应用已成为业内普遍的共识,相关应用由虚拟模型向现实应用逐步发展,将最终成为行业发展的趋势。

表2 数智化技术微观应用趋势分析
(3)数智化投入方面,在单个体量超过15 万m2的项目上,2019年投入超过100 万以上的工程数量只占总调研项目比例的14%,2020 年占28%,上升趋势明显但是投入资源数量仍显示不足(图3)。
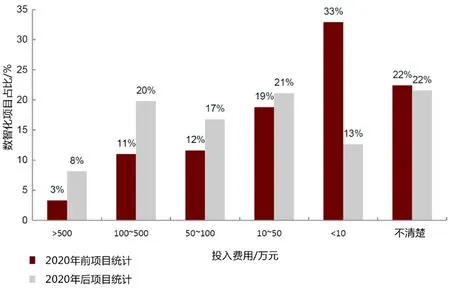
图3 2020 年前后项目数智化投入费用对比分析表
由此可见,无论是宏观统计还是微观统计,BIM 建模与出图、3D 建模节点优化、二维建模、进度施工方案模拟、施工过程模拟、动画制作与动画浏览仍然是大型项目的主要数智化应用场景;而深度的数智技术在施工管理实施阶段的应用,未有很好的落地性体现。可以说,虚拟环境下的数智化应用实际上仅是在“虚拟”的环境下体现,而并未在“实景”环境下深度应用。现阶段项目管理的数智化应用也大部分体现在模型数智化和过程数智化的事前数智化上,对项目管理中事中、事后数智化的落地案例极为缺少。
3 “数字孪生系统”的施工管理数智化
基于上述梳理与分析,传统虚拟环境下的数智化技术应用在项目管理的应用阶段有一定局限性,为了打破这种局限,就必须在项目的施工管理阶段进行实践。以客户痛点和最小化实验方法论为理论依据,兼顾传统数智化硬件与软件的应用趋势,开创性地提出吉宝静安中心项目在施工管理阶段“数字孪生系统”的应用实践。
3.1 客户需求
通过项目专项调研,对客户需求与客户总体目标进行统计(表3)。在项目的建设过程中,不同的公司对数智化技术的需求大相径庭。
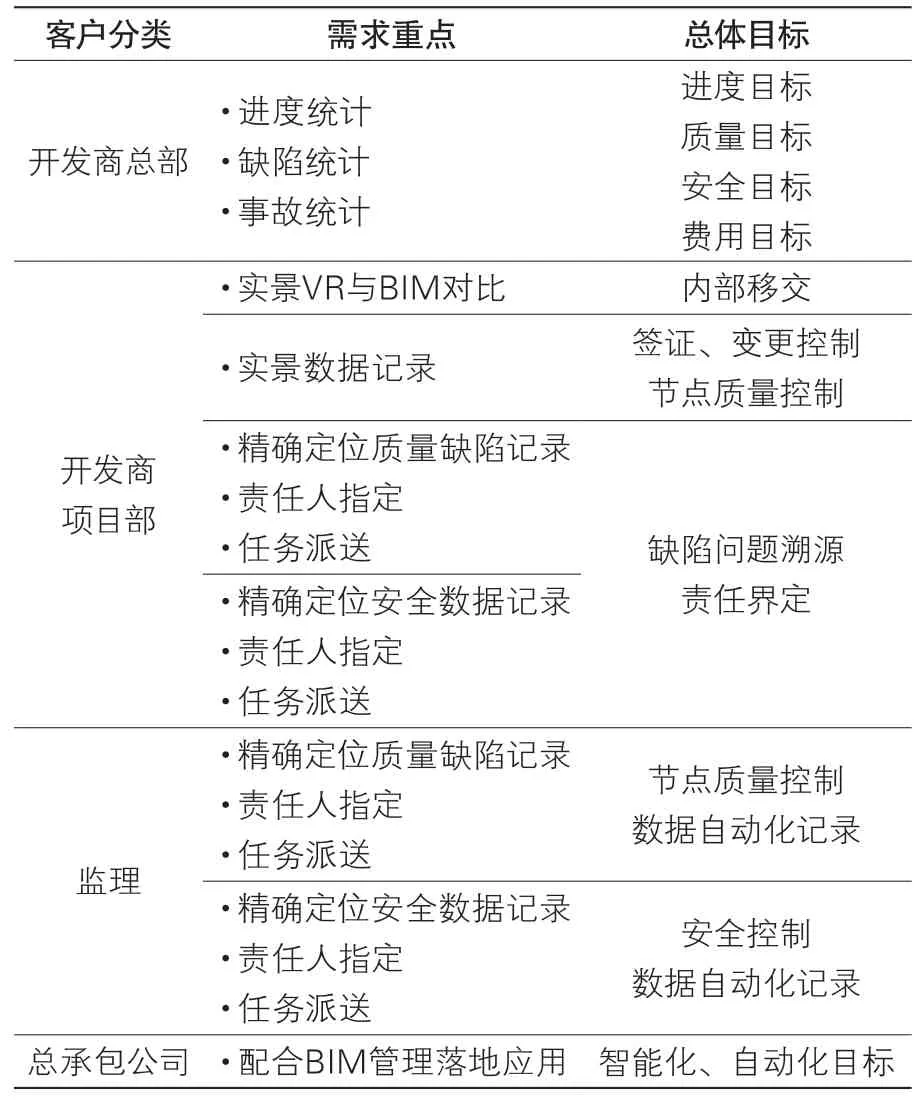
表3 客户分类与目标需求汇总表
(1)以传统开发商为代表的甲方管理团队,对数智化的应用寄予厚望,随着房地产市场由黄金时代转向白银时代,房地产公司不断谋求转型,极其期待数智化技术应用在公司转型阶段,不仅仅赋能,更要求赋值。从表格发现,其功能需求覆盖项目全生命周期,且对自动化、智慧化需求极高,让人工智能替代人工、让数智化投资产生效益的主要需求,是其重中之重。
(2)不同于甲方管理团队,监理与总包的功能需求会把数智化需求更多地展示在事前管理方面,便于其在市场竞争中获得更好的推广与商务效果。相反,考虑数据保密性、工程管理的部分机密性,对事中施工管理的实际需求积极性不高,更多的是配合甲方合同与管理要求的配合性数智化需求。但随着大型监理、总包单位BIM 部门的逐步落地与运营,其与甲方管理团队在功能需求上的技术目标趋势必定会逐步趋同。
3.2 用户需求
根据用户访谈,汇总实际系统使用用户的客观需求(表4)。

表4 使用用户的具体需求清单
3.3 亟需解决的问题
综合客户与用户的需求调研,发现施工阶段的数智化应用存在覆盖面广、问题精细化要求高与智慧自动化欠缺等问题。因此,应尝试在方案阶段对重点且有碎片化的问题提供系统性解决方案,并将根据用户属性,降低系统的使用难度,确保数智化技术的落地性与可行性,避免数智化技术仅停留在专家应用层面。笔者认为,真正的数值化转型,其初级阶段必须是专家数智化应用转变为人人数智化应用。在这个阶段使用“数字孪生系统”的工地施工技术人员,将在最简单的应用界面上解决项目工作的大部分问题,如:通过模型图纸与现场施工的精准定位对比,来解决质量问题;通过施工模型与现场工况的匹配,来解决安全栏杆的搭设问题;通过虚拟现实环境下的实物量工作,来确保签证数量的实时有效性、准确性与可溯源性等。通过上述架构,可实现“三大维度实时可控”的数智化目标,其初步的问题解决框架如图4 所示。
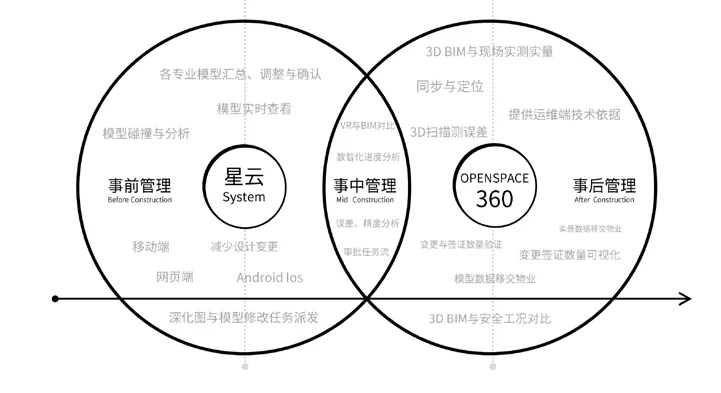
图4 “数字孪生系统”问题解决框架图
3.4 数字孪生系统的布局意义
从客服需求端、用户需求端了解问题,继而寻找解决方案的过程可以看出,施工现场记录与溯源管理是目前困扰建筑行业的最大管理问题之一。各施工单位按不同时间表工作,无法保证信息的及时沟通,且经常通过人为主观方式进行记忆和判断,给项目带来了很多争执和资源浪费。因此,适时地采用全新一代“数字孪生系统”的工地现场数智化记录方式,提供全面的施工现场数智化记录,可避免因文字、图片记录不准确或缺失等所导致的争执,提高施工管理效率;同时,远端人员也能及时查看施工现场的状况、进度及发生的相关问题,从而及时采取措施,降低项目风险。这是“数字孪生系统”实施与推广的最大意义。
4 应用方案
4.1 软件与硬件介绍
4.1.1 软件
在本项目的应用方案中,对国内的BIM 星云综合管理系统及国外的OpenSpace 360 系统两套软件进行应用流程整合,即在技术上保证行业内先进性的同时,也结合本土用户的需求使用国内软件进行应用嫁接,以期取得更好的应用效果。同时,考虑数据同步的便捷性和现场使用效率,“数字孪生系统”的软件组成均由云平台软件与SaaS(Software-as-a-Service,软件即服务)模式进行集成,便于后期处理和各个使用端的使用。
4.1.2 硬件
使用云计算处理后的软件对本地化硬件要求十分简单:CPU 方面,一台i3 级别的笔记本即可兼顾平台的日常工作使用;而对于日常的虚拟巡检与VR/BIM 对比功能,也仅需一台分辨率1080P 以上、360°视角的摄像机,就可以进行落地化实施。为了能更好地固定与使用摄像头,本项目还特别定制了与之相匹配的安全帽(图5),在保证技术人员安全使用的同时,确保拍摄的稳定和人员行走的便利。

图5 特制安全帽
4.2 施工现场数智化记录服务软件技术原理
本项目采用全新一代的施工现场数智化记录方式,简单、快速和高效地捕获现场图像数据,进而通过计算机视觉和人工智能等技术方式,协助优化施工现场数智化管理。新一代的施工现场数智化记录平台应采用以下技术方式。
4.2.1 计算机视觉
计算机视觉是计算机解读和理解电子图片和视频的方式,它被广泛运用于各个行业,如自动化、医学影像、机器人和无人驾驶车等。视觉引擎有赖于计算机视觉自动将图片排列在一个集成场景中,识别并标注其关键特征,然后在平面图上绘制。这些特征可以通过图片和空间追踪,让人更好地理解所拍摄的环境。
4.2.2 机器学习
机器学习是指在没有具体指令的情况下,计算机如何查找模型和解决方案。机器学习算法基于训练数据创建数学模型,无需明确设计程序如何执行任务,即可预测未来结果。视觉引擎将每个拍摄和每次巡检作为训练的数据集,实行追踪。
4.2.3 3D 重建
3D 重建是从2D 图片重新创建3D 物体或空间的过程,一般用于医学、测量、机器人和矿产领域。视觉引擎利用3D 重建定位空间特征并创建3D 环境(图6),通过对两张图片特征的比较,计算相机的位置,以最佳方式排列这些特征;每个全面的视频拍摄中,这个过程会被重复几千次,从而创建出一个3D 点云;点云又采用直接方式,将图片特征和空间中的3D 位置连接。

图6 3D 重建
4.2.4 同步定位与地图构建(SLAM)
同步定位与地图构建(SLAM)是指在未知环境中移动的同时,可对未知环境构建地图的科技。SLAM 是用于无人驾驶车导航的核心算法之一,感应器在当地环境移动时,会持续拍摄照片或进行扫描;通过算法排列序列数据,从而在平面图上估算行走路径。机器学习系统会利用后续拍摄优化估值,以增加每次行走的精确度。
4.2.5 图像分割
图像分割是将同类像素分到一组,组成逻辑块。这些逻辑块可以是单纯按照特征分组,也可以和预设的类别及标签进行关联。建议施工现场数智化记录平台使用图像分割开发一系列可用于建筑领域的分类和分类器,将原图转化为逻辑分割,用于追踪和计算。
4.2.6 Autodesk Froge 云平台引擎
这是基于Forge 云平台,专为开发者打造的PaaS 云服务体系。Forge围绕“数据”,针对智慧制造、智慧工程、智慧物联的中心来提供强大的网络API 体系,解决了目前工程建筑行业、制造行业等围绕设计数据创新的许多核心挑战,其实用性、便捷性与使用阶段的感观效果,可以为整个平台带来质的提升。
4.3 施工阶段数智化应用技术标准与要求
4.3.1 施工现场数智化记录标准的制定
由甲方制订施工现场数智化记录实施方案,用于施工阶段的施工现场数智化记录实施;总包、监理或专业分包根据项目情况制定相关的施工现场数智化记录平台硬件和软件管理使用细则,包括但不限于管理流程、组织架构、沟通机制、培训计划、职责权限等。
4.3.2 制定现场数智化记录交付标准
制定项目实施细则,并记录和管理现场数智化记录平台,包括:①每日线上巡检数智化报告;②每周项目进度跟踪数智化分析报告(记录分析频率待定);③项目结束后,施工现场数智化记录完整移交报告。
4.4 施工现场数智化记录的落地性应用模块
4.4.1 虚拟巡检模块
使用Openspace 360 定制化系统,随时随地可以快速查看项目形象进度。其重点在于,可以通过分屏功能选择两个日期来查看施工过程的进展变化。
4.4.2 BIM 对比模块
使用施工现场数智化记录平台,通过对BIM 星云系统与OpenSpace的虚拟现实环境在综合平台上的实时对比,可以在电脑端快速查看实际施工情况并与BIM 模型进行比较。
4.4.3 巡检记录模块
巡检记录功能可以快速地将手机在现场拍摄到的问题记录自动定位到项目图纸中,或者通过施工现场数智化记录平台在线记录和管理问题,使整个项目团队及时了解项目情况,从而做出最优化的解决方案,减少项目风险和成本增加。
4.4.4 进度跟踪模块
根据施工现场数智化记录,利用计算机视觉和人工智能全自动计算出施工现场的工程进展情况,并用图表和立体模型详细展示完成的数量、比例和团队的工作效率,以协助项目管理者及时、快速地了解项目情况,优化现场施工管理,同时也可以作为项目付款依据。
5 结语
综上所述,吉宝静安中心项目通过数智化理论、标准与应用方案的分析,总结了一套可适用于20 万m2以下的商业办公地产项目的“数字孪生”系统。结合虚拟现实VR 设备与BIM建模平台的综合性云平台系统,可以快速实现现场任务派发、3D/2D 图纸对比、实时记录与事后溯源。
项目将数智化技术集于“数字孪生”系统之后,又形成了一套可以嫁接最新技术资源的中台系统;并在日常使用过程中,让专家数智化转化为人人数智化的落地性平台,势必会在推动行业数智化转型的趋势中,提供丰富的理论与实践依据。
猜你喜欢
江苏安全生产(2023年1期)2023-02-08
中国交通信息化(2022年3期)2022-12-08
商品与质量(2021年43期)2022-01-18
鸭绿江(2021年17期)2021-10-13
香格里拉(2021年2期)2021-07-28
现代企业(2021年2期)2021-07-20
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年7期)2021-07-16
劳动保护(2018年5期)2018-06-05
中国房地产业(2016年2期)2016-03-01
