
基于CATIA DMU的玻璃升降系统运动仿真与设计优化 Motion Simulation and Optimization of Glass Lifting System Based on CATIA DMU
2021-11-30 17:42郭敏GUOMin
内燃机与配件 2021年22期
郭敏 GUO Min

摘要: 玻璃升降系统行程匹配困难、与周边零件间隙设计是新车型开发过程中的难点所在,本文通过对玻璃升降系统的运动原理进行详细分析,采用CATIA DMU运动机构模块搭建玻璃升降系统的运动机构模型,可输出各部件的行程对应曲线,简化了玻璃升降系统各部件行程的匹配过程,降低了后期样车试制阶段产生问题的风险,并通过CATIA DMU运动机构模块对玻璃升降系统与周边件的距离进行了模拟分析,可输出距离曲线与包络体来详细分析玻璃升降系统的设计合理性。
Abstract: Glass elevator system matching difficulties, and clearance design with peripheral parts is difficult in the process of the development of new models, this article through to the glass elevator movement principle in detail analysis, using CATIA DMU motion mechanism motion mechanism model of elevator system module structures, glass, of the various components can output the corresponding curve, Simplifies the glass elevator system components of the matching process, reduce the risk of late to produce prototype trial-manufacture phase, and through the CATIA DMU motion mechanism module of glass lifting system and the distance around a simulated analysis, can be output distance curve and envelope to a detailed analysis of glass design rationality of lifting system.
關键词: 玻璃升降系统;CATIA DMU;运动仿真;设计优化
Key words: glass lifter system;CATIA DMU;motion simulation;design optimization
中图分类号:TH16;U463.9 文献标识码:A 文章编号:1674-957X(2021)22-0218-02
0 引言
玻璃升降系统是用户日常频繁使用的车身附件之一,其设计状态的好坏不仅非常影响用户的使用感受,而且关乎着汽车的安全。玻璃升降系统中的行程匹配及运动过程中与周边零件的距离设计一直是汽车开发过程中的难点,通常采用样件匹配-样件更改-样件匹配的模式来逐渐逼近最合适的状态,由于制造精度影响较大导致匹配难度大、周期长[1],难以确定最终的零件状态。
在计算机虚拟技术的发展和企业持续追求利润最大化的双重驱动下,CATIA软件中的DMU运动机构模块的作用是对产品的真实运动进行仿真分析,可以提供用于工程设计、加工制作、产品拆装维护的模拟环境,是支持产品和流程、信息传递、决策制定的公共平台[2]。本文以叉臂式玻璃升降系统为例运用CATIA DMU运动机构模块进行了运动仿真研究,可精确地输出玻璃升降系统各运动部件的行程,为玻璃升降系统的行程匹配提供了理论依据,形成了一种精确地玻璃升降系统行程匹配方法,有效提高了设计效率与设计精度,避免了新产品开发过程中因行程匹配不准确造成的玻璃升降系统失效问题。同时,运用CATIA DMU运动机构模块的运动仿真工具,对玻璃升降系统各运动部件与周边零件如外把手总成的距离进行了模拟分析,可输出各运动部件与周边零件的距离随运动行程变化的关系曲线或包络体,为玻璃升降系统的设计提供了理论支持[3]。
1 玻璃升降系统运动机构原理分析
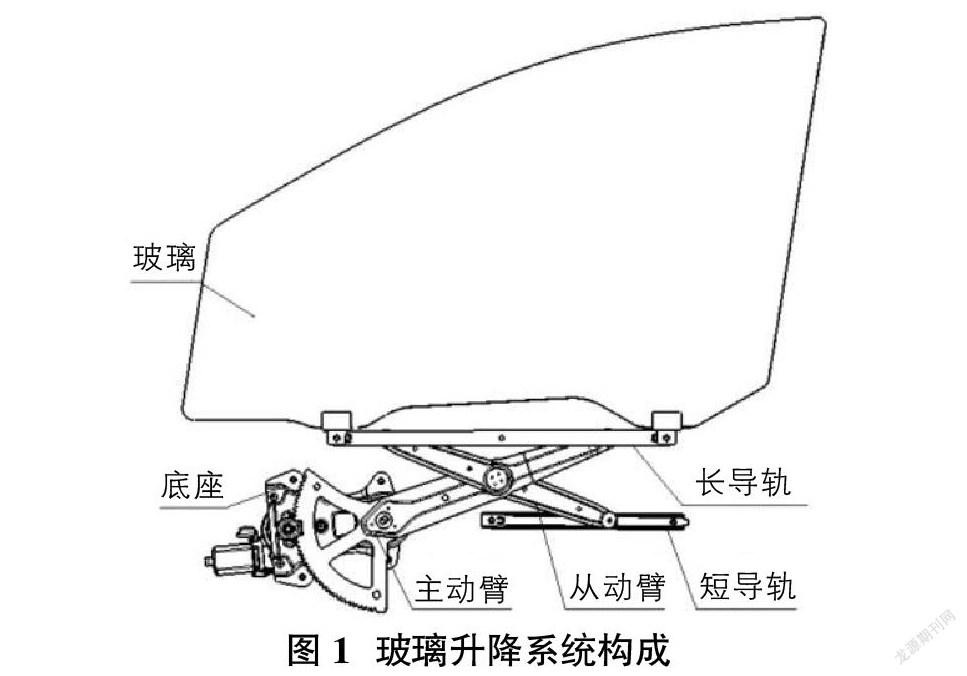
图1所示为玻璃升降系统的部件示意图,叉臂式玻璃升降系统按照相对运动状态可分为玻璃、主动臂、从动臂、长导轨、短导轨以及底座6个部件,叉臂式玻璃升降器的工作原理是通过摇把或者电机驱动,带动齿扇及主动臂旋转,从而带动与长导轨刚性连接的玻璃的升降,同时带动从动臂的旋转,保持玻璃升降过程中的平衡。
2 基于CATIA DMU的玻璃升降系统运动仿真模型
2.1 玻璃升降系统数字模型建立
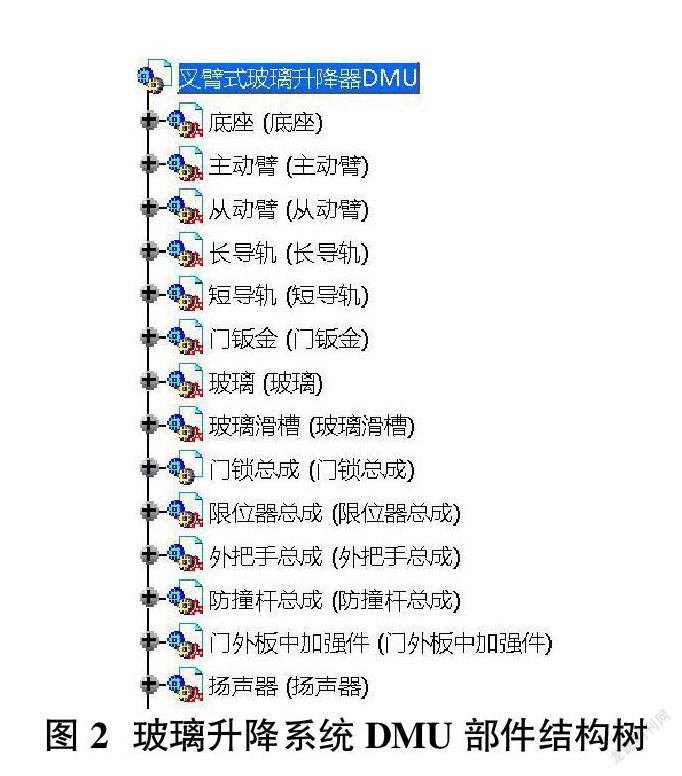
因叉臂式玻璃升降器运动过程中会产生变形,为方便玻璃与玻璃升降器装配,布置时应布置在下平衡点位置即玻璃升降器的初始位置。根据各部件之间的相对位置关系,按照DMU运动模拟要求对玻璃升降系统具有相对运动关系的各部件进行拆分;之后,在CATIA DMU运动机构模块中建立装配文件,并建立约束确保各部件在实际的正确位置,为后续建立运动模拟模型做准备。装配体建立完成后结构树如图2所示。
2.2 玻璃升降系统运动副建立
依据玻璃升降系统各部件之间的相对运动关系,对具有相对运动关系的5个部件建立表1所示的W1~W10共10个位置的运动副。由于玻璃是沿着玻璃导轨的外形运动,而叉臂式玻璃升降器长导轨的运动是直线运动,因此玻璃升降器在运动过程中会随着玻璃的外形产生一定的变形,主动臂上滑块在长导轨内的运动应简化为点曲面,假如采用点曲线或者棱形等约束的话会导致整个运动仿真模型无法模拟。
2.3 玻璃升降系统运动仿真参数设定
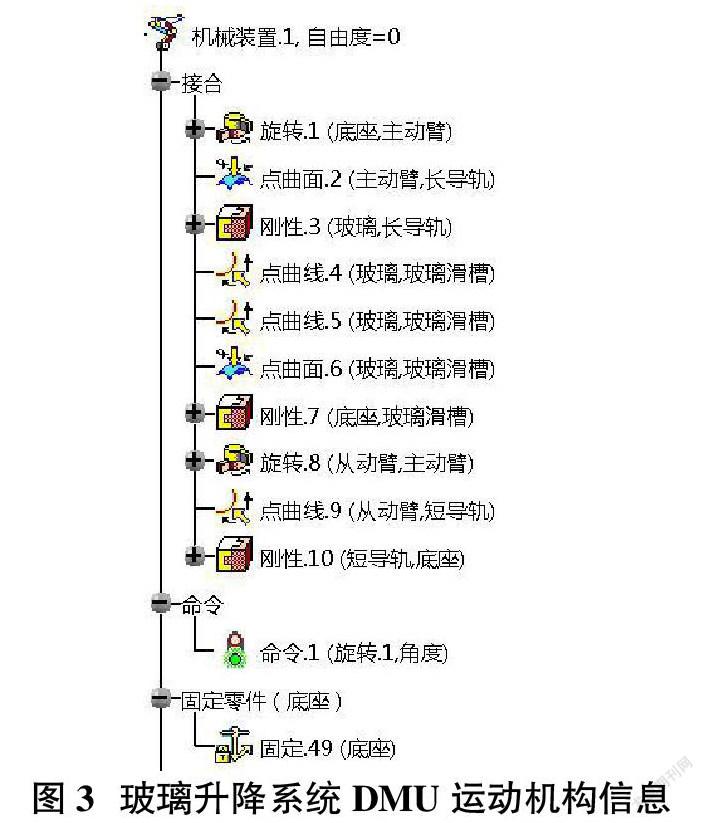
运动副建立完成后,定义玻璃升降器底座为固定构件,并设置W1位置旋转副作为驱动命令,如图3所示,此时CATIA提示系统的自由度为0,具有相对运动关系的各部件自由度均被完全约束,CATIA界面会弹出“可以模拟机械装置”提示。
3 基于DMU运动机构模型的周边件空间分析
玻璃升降系统的布置涉及到多个运动部件在车门内外板腔体内的复杂运动,由于玻璃升降系统的运动轨迹不规则,通过常规方法很难测量其运动过程中与周边零件的空间间隙情况,而CATIA DMU运动机构可以很好地解决这一问题。下面以校核玻璃升降系统与外把手总成的运动间隙为例进行分析。
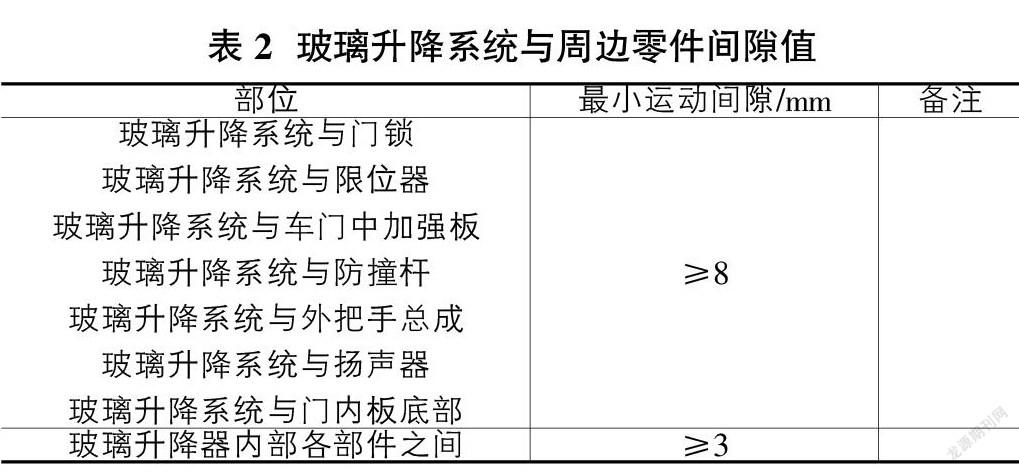
在DMU运动机构模块中定义玻璃与外把手总成之间的距离与区域分析,添加自定义曲线,定义主动臂绕底座旋转角度为横坐标,玻璃与外把手总成的距离为纵坐标,然后进行模拟,模拟完成后可输出二者的关系曲线。其余零件与玻璃升降系统距离可参照外把手总成方法分析,周边零件与玻璃升降系统的间隙参考表2设计。
因外把手总成(含外开拉杆)也为运动件,仅仅分析外把手总成静止状态时与玻璃升降系统运动过程中的最小距离是不够的,使用过程中会有干涉风险。建立门锁系统的CATIA DMU运动仿真模型后,通过点击模拟、拖动驱动命令长度/角度、插入、编译模拟(结构树中就会生成重放)、扫掠包络体,可生成外把手总成运动行程内的包络体,采用包络体进行与玻璃升降系统空间距离分析更直接、更准确。
4 基于CATIA DMU运动仿真模型的行程匹配
叉臂式玻璃升降器长导轨及短导轨设计过长会造成成本增加及布置难度大等问题,过短会造成玻璃升降困难甚至卡滞无法升降、异响等等问题,前期长导轨及短导轨的设计尤为重要。采用CATIA DMU运动机构模块,定义主动臂及长导轨连接点、从动臂及短导轨连接点与初始位置之间的距离与区域分析,可输出主动臂滑块在长导轨内的行程及从动臂滑块在短导轨内的行程,从而确定长导轨及短导轨的长度。以短导轨长度设计为例,首先创建从动臂上滑块的中点,依次点击模拟、拖动驱动命令角度、插入、编译模擬、轨迹(选取前面制作的从动臂上滑块的中点),此时可生成从动臂上滑块的中点的运动轨迹,根据运动轨迹确定短导轨的长度以及位置。
5 结论
本文介绍了一种采用CATIA DMU运动机构模块分析玻璃升降系统运动过程中与周边零件的间隙设计及确定各部件行程的方法,可以有效缩短玻璃升降系统的开发周期及降低研发成本,大大降低样车试制阶段产生问题的风险,可很好地提高玻璃升降系统设计过程中的效率及准确度。
参考文献:
[1]刘海玲.汽车侧门外开启系统设计[J].上海汽车,2010(12):24-26.
[2]徐晓峰.基于CATIA的车门设计及仿真分析[B].汽车零部件,2019(3):32-34.
[3]李超帅.基于CATIA DMU的门锁系统运动仿真及设计优化[A].汽车零部件,2016(11):13-16.
猜你喜欢
建筑建材装饰(2016年14期)2017-01-05
建筑建材装饰(2016年11期)2016-12-29
汽车科技(2016年6期)2016-12-19
小学教学参考(综合)(2016年11期)2016-11-14
美与时代·城市版(2016年8期)2016-11-10
企业导报(2016年13期)2016-07-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
- 内燃机与配件的其它文章
- 纯电动汽车坡道起步防溜系统及控制策略的研究 Research on the Anti-Slip System and Anti-Slip Control Strategy of Pure Elect
- 气缸套网格状激光淬火机床设计 Design of Grid Laser Quenching Machine Tool for Cylinder Liner
- Arduino在汽车CAN通讯中的应用研究 Research on the Application of Arduino in Automobile CAN Communication
- 内燃机零部件结构设计及应用研究 Structural Design and Application Study of Internal Combustion Engine Components
- 汽车智能熄灯保护系统的开发 Development of Intelligent Lights-off Protection System for Automobile
- 基于Workbench的炭罐电磁阀流量特性分析与优化 Analysis and Optimization of Canister Purge Valve Flow Characteristics Based on Workbench