一种用于消防的四足机器人
2021-12-02 18:55田皓宇刘福裕韩冰赵杨王雪伟
科学与生活 2021年25期
田皓宇 刘福裕 韩冰 赵杨 王雪伟

随着现代科技的发展近年来机器人受到各行各业的青睐,尤其是在火灾救援、地质灾害救援时因可代替人员进行搜救深受喜爱,本文基于,设计了一款可在履带运动模式、四足运动模式自由切换的机器人,本文所研究的机器人是基于热传感模块、opencv技术的视觉火源识别定位系统和电磁弹射系统的消防侦察机器人。在军事、生活、工业领域越来越受社会和国家重视,而能够适应复杂环境地形的足式机器人更是受到广泛关注,足式机器人可以摆脱 轮式机器人对复杂环境地形的限制,自由穿梭于森 林、河流、山坡、沙漠等严峻的地貌。足式机器人 又分为双足、四足、六足,其中四足的应用范围较 其他 2 种更为广泛。美国 Shigle 及 Baldwin 在 20 世纪 60 年代開始设计使用凹凸轮的连杆机构来 设计机动性较好的步行车,但由于技术限制,步行 车的复杂地面车适应性较差,1968 年美国人 MOSher 设计出 Walking Truck。Walking Truck 虽然 在操作过程中并不能实现流畅行走,但是其已经具 备有效行走及跨过障碍物的能力,Walking Truck 的 出现被视为现代步行机器人发展历程中的伟大突破
目前我国的消防侦察无人机和智能化高射水炮迅速发展,但是仍存在着许多缺点,如消防无人机存在空中发射后坐力大和需要破窗进入的缺点,高射水泡存在着灵活性和机动性较差的问题。针对上述问题,笔者设计了一款可在履带运动模式、四足运动模式自由切换,基于热传感模块、opencv技术的视觉火源识别定位系统和电磁弹射系统的消防侦察机器人。可应用于楼道、复杂地形的消防和侦察。
1.结构设计
目前四足机器人用腿部来区分主要分为串联腿和并联腿,根据关节配置进行分类分为外膝肘式、全肘式、全膝式、内膝肘式。根据自由度来划分,主要分为8个自由度和12个自由度。目前的足端的设计主要分为球形足端、圆柱形足端、仿生足端。本文设计的为伪球形足端,伪球形足端拥有和球形足端一样的环境适应能力,但在防滑和稳定上更胜一筹,如图。
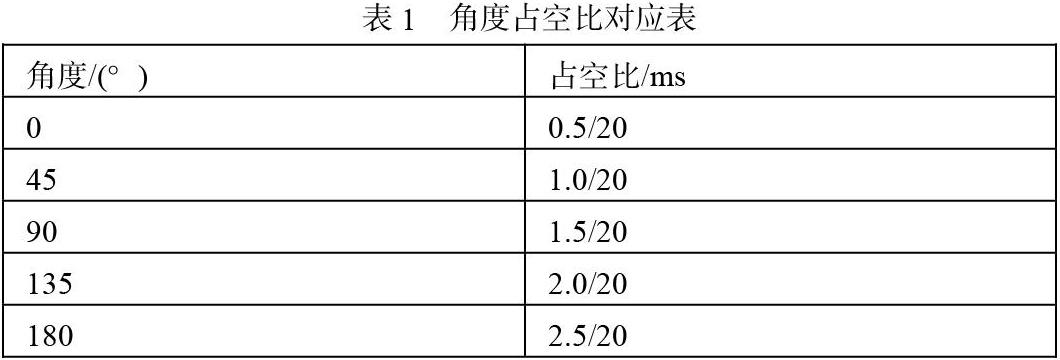
本设计将波士顿动力的无刷电机改用做舵机作为动力,舵机的控制原理较为容易,需要一个20 ms的脉冲周期,本设计使用180°舵机,在 20 ms 的脉冲周期中使用不同占空比的高低电平,不同的占空比对应的角度不同[13-14],占空比和角度对应比如表 1所示。
控制算法模型是以每个腿建立中心点,采用运动学逆解,进行计算。
将足端坐标离散化,离散为许多小点再用逆解将足端坐标转换成舵机转动角度。
我国楼房建筑踏步楼梯的尺寸一般情况下为楼梯的宽度为300mm,高度为150mm。四足机器人的最大长度为因此必须保证y不小于150mm,x为100mm
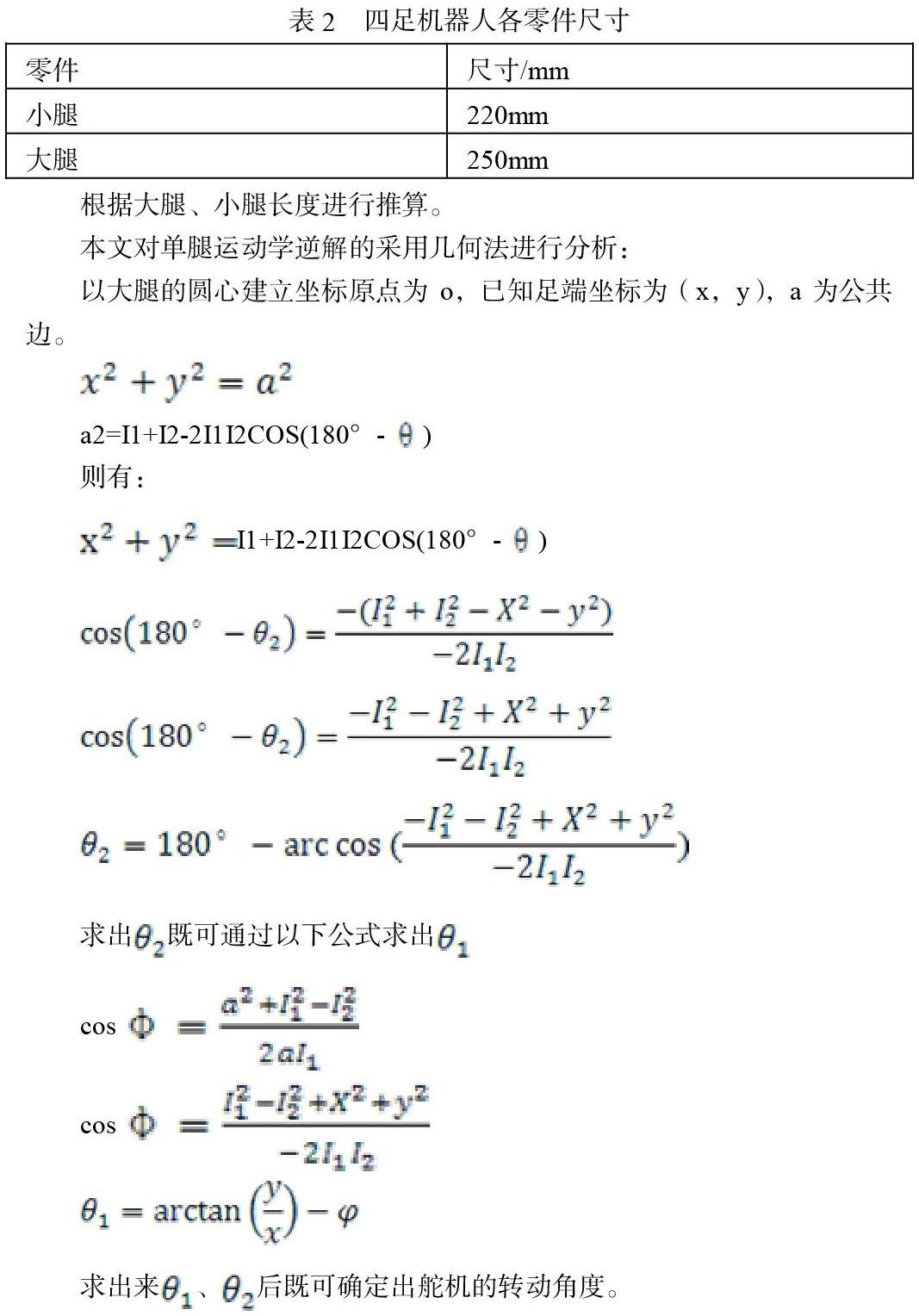
根据机械的整体设计四足机器人各零件对应的尺寸如表 2
根据大腿、小腿长度进行推算。
本文对单腿运动学逆解的采用几何法进行分析:
以大腿的圆心建立坐标原点为o,已知足端坐标为(x,y),a为公共边。
求出来、后既可确定出舵机的转动角度。
公式中先计算出小腿的舵机转动角度再根据小腿舵机角度,计算出大腿舵机转动角度步态采用单腿前进步态,每个的足端相差 1/2.5 个相位。
参考文献
[1]麦杨杰,袁泓博,郭建,等. 仿生四足机器人的设计与 运动步态分析[J]. 机械制造,2019,57(12): 52-55,114.
[2]黄寅光,刘祚时. 基于线性 CCD 仿生四足爬坡的设计和 实现[J]. 制造业自动化,2019,41(11): 73-76,123.
猜你喜欢
科学之谜(2018年4期)2018-09-17
中国新闻周刊(2017年20期)2017-06-15
养生保健指南(2017年4期)2017-05-26
人人健康(2017年8期)2017-05-02
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
红领巾·萌芽(2015年5期)2015-06-16
中国信息技术教育(2014年5期)2014-03-17
小朋友·聪明学堂(2009年10期)2009-10-20