
基于Esp32的四旋翼无人机系统及其基本控制
2021-12-04 21:29张道宏铁振弘
科技信息·学术版 2021年30期
张道宏 铁振弘

摘要:本系统基于Esp32控制器,使用4个820空心杯电机,制作小型四旋翼无人机,能实现空中自平衡,红外自避障,并简要介绍了四旋翼无人机在6个自由度上的控制方法及原理。
关键词:四旋翼无人机;嵌入式应用;ESP32
中图分类号:TN929.54
引言
无人机就是利用无线遥控或程序控制来执行特定的航空任务的飞行器,普遍运用在当代工业,军事上。无人机采用空气动力为飞行器提供所需的升力,特别的,四旋翼无人机采用四个螺旋桨,通过控制不同螺旋桨电机的转速实现无人机在三维中的移动,旋转。
虽然无人机的定点作业目标一般不会非常复杂,但是在高空中,无人机作业的不可控因素过大,比如说由于气压的不稳定,无人机的四旋翼即使在相同的转速下,产生的力也可能不同,或者由于在高空,无人机将收到完全不可控的来自于各个方向上的风阻。再者,无人机的硬件磨损等将使得四旋翼的电压无法达到预期电压,即四旋翼的转速控制可能产生相应的误差。因此即使训练有素的无人机操控者也无法在高空中稳定地操控无人机作业。
因此,本文介绍了一种基于Esp32的四旋翼无人机的实现方式,能够使用无线遥控控制无人机的移动,对外界的不可控干扰可以自发地调整四旋翼电机快速对干扰做出反应,在风较小的环境下实现自平衡,并通过红外测距实现自避障。
1.无人机构造
本系统无人机采用四旋翼结构,主控板集成Esp32,驱动,陀螺仪,红外测距,放置在整个无人机的重心处,四个空心杯电机对称分布在无人机的四周,空心杯电机上方装有小型螺旋桨,提供升力。
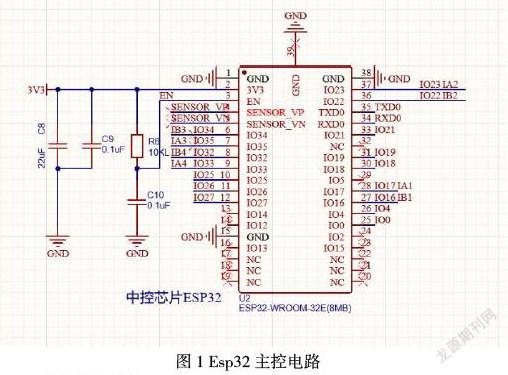
1.1 Esp32主控制器
ESP32 是由乐鑫公司推出的一款采用高性能 Xtensa® 32 位 LX6 双核处理器的微控制器,集成了天线开关、射频 balun、功率放大器、低噪放大器、过滤器和电源管理模块,整个解决方案占用了最少的印刷电路板面积。2.4 GHz Wi-Fi 加蓝牙双模芯片采用 TSMC 低功耗 40nm 技术,具有最佳的功耗性能、射频性能、稳定性、通用性和可靠性,适用于各种应用场景和不同功耗需求。
1.2无人机电源
无人机对各模块重量有着较高的要求,过重的电池会导致无人机难以平衡,因此市面上的无人机一般都采用锂聚合物电池,相对普通电池来说,锂聚合物电池具有超薄化特征,可以做成各式各样的小型电池,较适合于无人机的使用。
1.3陀螺仪
无人机的平衡,移动,升降都离不开陀螺仪提供的三轴角度,因此选择一个合适的陀螺仪是无人机研发的重要环节。本系统采用Mpu6050陀螺仪芯片,其能输出三轴角速度及角加速度,并自带旋转矩阵,四元数,欧拉角格式的融合演算。
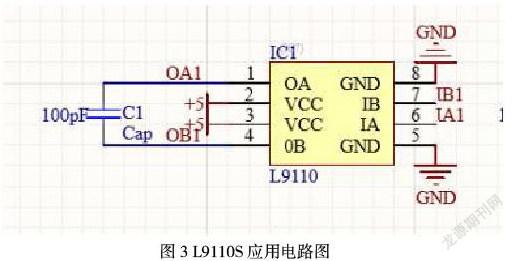
1.4电机驱动
本系统采用4个820空心杯电机控制螺旋桨旋转。采用L9110S芯片驱动,L9110S是一款低成本直流电机驱动集成电路,广泛应用于玩具汽车无人机的电机驱动。本系统使用ESP32输出pwm信号至L9110S,驱动空心杯电机,其电路如下:
1.5无人机外形
无人机在空中移动过程中,受到的主要阻力即为不可控分风阻,为了使无人机的所受的阻力尽可能地小、均匀,应当将无人机的外壳设计为流线型,本设计PCB板即为流线型的设计。使用四个等半径的圆弧,与四个等径圆交织形成流线型中心对称的无人机板。
2.无人机的基本控制
无人机的基本控制主要分为:上升下降,自转,前后运动,侧向运动。
1.上升下降
无人机在竖直方向上主要受到两个力,分别为无人机机身的重力G以及四个螺旋桨提供的升力F。当F=G时,无人机的高度将保持不变;当F>G时,无人机逐渐升高;而当F<G时,无人机逐渐下降,其升高或下降的速度及加速度满足以下公式:
其中v为升高或下降的速度,a为加速度,v为竖直方向上的初始速度,当无人机的竖直方向上静止时,v0=0。但在无人机中,无法直接测得无人机所提供的升力以及无人机的所受的重力,因此一般采用PID控制使得无人机达到目标高度。具体控制如下:
规定以下符号:
高度计测得当前高度ht,
无人机的新期望高度h1,
四个空心杯的初始电压v0,
四个空心杯的当前电压vt,
无人机的上升下降速度S。
在每一个时刻,令高度差值dh=h1-ht。通过单片机控制vt=v0+S*dh。当dh较大时,四个空心杯的电压较高,转速较快,无人机的上升速度较快,而当无人机接近目标高度时,dh较小,无人机停止上升,最终停留在目标高度,实现无人机对目标高度的控制。在实际运用中,一般采用PID的控制方式使得目标控制更加平滑,高效。在该控制目标中,采用位置式PID,输入量为ht-h1,输出量为电压增量dv,其与vt的关系应当满足vt=v0+dv。
2.自转
为了保证四悬翼飞行器偏航角的稳定,飞控模块会调整四个电机的速度来保证这两个旋转力矩可以被互相抵消进而保证飞机不会自旋,因此,如果想让无人机自转的话,主要打破这个平衡即可,即按照图中的旋转方向,增加 1 4 的转速,减少 2 3 的转速可以在保证姿态稳定的條件下将飞机逆时针转动;减少 1 4 的转速,增加 2 3 的转速可以在保证姿态稳定的条件下将飞机顺时针转动。
3.前后运动及左右运动
为了使无人机产生在14方向上的扭矩,则应该令电机1加速,电机4减速,电机2、3保持不变,使得无人机产生一定的倾斜,无人机就会得到水平方向上的力,即可朝着14方向移动。相反,加速电机4,减速电机1,其余两电机保持不变即可朝着41方向移动。左右运动同理。
在各个控制方向上,使用并级PID控制连接,则能协调各个无人机的参数,使其同时达到平衡,并完成特定的移动目标,即完成移动控制。
3.无人机的校准与自平衡
3.1无人机的校准
无人机的校准是无人机保持平衡的关键步骤之一。无人机在空中保持平衡主要依赖于陀螺仪的x,y,z轴三轴偏向角,因此需要取陀螺仪零位角作为基准角。具体方式为,将无人机放在水平的地面上,按下校准键,主控单片机将此时的陀螺仪的三轴角度保存为基准角(P0,Y0,R0)。当无人机起飞后,对当前时刻的三轴角(Pt,Yt,Rt)与基准角做差即可得到在三个方向上角度的期望改变量(Pd,Yd,Rd)。
3.2不可控误差的消除
无人机在飞行过程中,受到风阻,压强,机身不平衡,电压不稳定等繁多的不可控因素。因此,在无人机控制算法中,需要包含一定的控制算法以消除这些不可控因素。本研究拟针对误差的不同种类型,采用不同的消除误差方式,具体如下:
参数采样误差:
无人机在采集自身参数时,由于电压的不稳定,模块的精准度有一定的局限性,无法使得获得的参数达到完全的精准。因此,对于参数的采样误差,拟采用卡尔曼滤波,对参数的采样进行滤波,提高获取参数值的可靠性及稳定性。
风阻误差:
无人机在高空飞行中,所面临的风阻可能来源于各个方向,并且强度未知。转换为物理模型即可以理解为无人机将收到来自于随机方向上,且强度不定的力。为了消除这种力,首先我们对该力进行分析,并命名为f。f的大小总体将满足高斯分布,方向完全随机。因此在计算受力分析时,应该同时包含f的受力。
在每一个时间周期后,无人机将返回自身的位置参数,同时计算出无人机当前的位置参数与上一个时刻的期望位置参数的差值。而此刻造成该误差的原因即为不可控因素所造成的误差,此时即可定性分析不可控误差所造成的影响,并在下一个时刻尝试抵消该不可控误差,并在下一个时刻更新不可控误差的分析,如此反复即可最终实现尽可能的消除无人机所受的不可控误差。
3.3红外测距自动避障
无人机板载四个红外测距,朝向四个无人机方向,时刻检测无人机的各方向上是否有障碍物。具体摆放方式如下:
当无人机在某个方向上的障碍物距离小于特定值a时,紧急停止无人机在该方向上的移动,并反馈在飞控系统当中。必要时应当产生在相反反向上的移动目标,以实现四旋翼无人机的红外自动避障系统。
4.结语
四旋翼无人机主要通过改变4个电机的转速来调节螺旋桨的转速,控制螺旋桨的升力以实现对无人机的垂直起降,自由懸停,自转,前后左右移动的六个自由度上的移动控制。这些优势决定了他是一种军民两用的高科技设备,从当前国内外的诸多领域中可以了解到,四旋翼无人机当前已经能够完成各种各样复杂及危险的任务,实践价值较高。
