基于动作周期退化相似性度量的机械轴健康指标构建与剩余寿命预测
2021-12-07 10:09周玉彬肖红王涛姜文超熊梦贺忠堂
计算机应用 2021年11期
周玉彬,肖红,王涛,姜文超,*,熊梦,贺忠堂
(1.广东工业大学计算机学院,广州 510006;2.广东工业大学自动化学院,广州 510006;3.中国科学院云计算产业技术创新与育成中心,广东东莞 523808)
0 引言
工业机器人在大型复杂零件的加工中被广泛应用[1],其中,六轴工业机器人在自动化生产系统中发挥着尤为重要的核心作用[2]。与此同时,六轴工业机器人精度退化和故障问题也十分严峻,给企业造成巨大安全生产风险和经济损失[3]。机械轴是工业机器人运动的核心部件和支撑,跟踪机械轴的健康状态并预测其潜在故障,对机器人的健康管理至关重要。机械轴的故障并不是突然发生的,而是从正常运行逐渐退化到失效经历了一段不同退化状态的过程。为了对工业机器人机械轴进行健康管理,需要为机械轴构建合理的健康评价指标,从历史监测数据中提取特征信息来识别和量化机械轴退化水平,进而预测其剩余寿命(Remaining Useful Life,RUL)。
目前国内外对工业设备健康指标(Health Index,HI)构建与剩余寿命(RUL)预测已经有不少研究,主要有基于模型的方法和数据驱动的方法两大类[4]。然而,在大多数实际工业生产过程中,对复杂设备机理进行建模分析十分困难,难以保证模型的精准性。因此,在传感器检测大数据背景下,基于数据驱动的评价与预测方法成为主流。基于数据驱动的预测方法可以分为直接预测和间接预测两类[4]。直接预测是指直接利用设备退化特征变量进行RUL 预测;间接预测是指利用设备退化特征变量构建健康指标(HI),再根据HI 进行RUL 预测。通常情况下,间接预测的准确性会更好,因此成为主流方法。文献[5]使用三种不同的统计方法(奇异值分解、累计特征平均值和马氏距离)获取滚动轴承的振动信号并构建其健康指标。为了全面评估系统健康状态,文献[6]提出了基于深度置信网络(Deep Belief Network,DBN)的无监督健康指标构建方法,通过无监督训练深度置信网络实现历史数据特征提取,并利用重构误差构建其健康指标,进而输入隐马尔可夫模型(Hidden Markov Model,HMM)进行剩余寿命预测。文献[7]使用深度卷积神经网络(Deep Convolutional Neural Network,DCNN)对轴承的深层特征进行学习,通过非线性变换将学习到的特征映射到健康指标,进而用于轴承健康管理。后来进一步提出了基于趋势毛刺的卷积神经网络的HI 构建方法[8],用于轴承健康管理。文献[9]利用CNN提取信号数据中的时序局部信息,结合RNN 进行信息连接,实现轴承健康指标构建。文献[10]提出了使用结构化域对抗神经网络(Structured Domain Adversarial Neural Network,SDANN),基于深度迁移学习技术实现多工况下轴承故障诊断。
然而,以上研究主要针对轴承、齿轮箱等特定领域的特定部件健康指标构建较多,方法不具有良好的普适性,目前针对六轴工业机器人机械轴的健康预测与状态管理研究较少[11]。不同于普通的简单旋转机械,工业机器人机械轴几何形状瞬时变换较复杂,其机械结构比较复杂,难以建立精确数学模型;所以,基于统计方法和机器学习的无模型方法成为机器人健康监测的主流选择[12-13],包括使用主成分分析(Principal Component Analysis,PCA)[11,14]、线性判别分析(Linear Discriminant Analysis,FDA)[14]、奇异谱分析(Singular Spectrum Analysis,SSA)[15]、希尔伯特变换(Hilbert Transform,HT)[15]和小波分析[11,16]等方法,对机器人振动信号、编码器信号、驱动电机电流、电压、转速信号等进行处理与分析,用于机器人故障检测。
在实际生产中,机械轴完成一套动作(如打磨、上下料等)具有一定周期性。若忽略动作周期性,仅仅基于数据进行退化分析,会因为在动作周期不同时期的数据表现不同,进而影响机器人实际状态退化分析的准确性。本文提出了基于动作周期退化相似性度量的六轴工业机器人健康指标构建与剩余寿命预测方法。首先,针对预处理后的机器人运行数据,使用MPdist 方法[17]关注两条时间序列共享的相似子序列特点,计算机械轴不同退化周期的相似性距离,进而构建健康评价指标;其次,将构建的健康指标集输入适用于时间序列分析的长短时记忆网络进行训练,建立健康指标与剩余寿命的映射关系;最后,混合利用MPdist 与长短时记忆(Long Short-Term Memory,LSTM)网络模型进行机器人剩余寿命自动预测与预警。
使用某公司六轴工业机器的加速老化数据集进行实验测试,实验结果表明,本文方法构建HI 的单调性和趋势性相较于其他对比方法至少高出了0.07和0.13,且RUL预测准确率更高,误差区间更小,验证了本文方法的可行性。
1 健康指标构建
MPdist 是一种新的距离度量方法[17-18]。MPdist 能够比较不同长度的时间序列,且对尖峰、遗漏、基线徘徊等问题具有较强鲁棒性。与传统动态时间规整(Dynamic Time Warping,DTW)算法[19-20]、欧氏距离(Euclidean Distance,ED)算法相比,MPdist 认为两个时间序列共享的相似子序列越多,则它们越相似,且与匹配子序列的顺序无关;同时,MPdist 可以容忍两条子序列数据点发生位置位移。
在确定工况下,工业机器人机械轴周期性执行固定的动作,不同动作周期之前会有不定时停顿,因此,周期性数据之间可能会有一定的停顿或者平移等。而现实工业过程对机械轴周期动作之间相似性的关注程度远高于对数据点位置的关注程度。如图1所示,对比两条发生50个采样点平移的序列,发现T2是序列T1向后平移50 个采样点形成的序列。使用三种方法计算平移前的比对距离均为0,平移后的距离对比结果如表1所示。由表1可知,MP 距离比DTW 距离和欧氏距离更适合衡量动作周期循环运动的工业机器人退化评估。
1.1 MPdist相似性度量
MPdist算法如算法1所示。
算法1 MPdist算法。
输入 待比对的时间序列T1和T2,对比子序列长度L;
输出 两条时间序列的比对结果MP距离。
1)创建子序列集。以滑动窗口大小L提取时间序列T1和T2长度为L的子序列,构建子序列集。其中3 ≤L≤min length(T1,T2)。
2)建立相似性连接集。使用1NN‑join函数分别寻找子序列集SubT1和SubT2中的互相最近邻,并分别保存在相似性连接集中,同时将中每对最近邻子序列的欧几里得距离保存在数组。
3)计算MP距离,计算式如式(1)所示。

1.2 基于MPdist相似性的健康指标构建
由于工业机器人在完成执行程序的命令时,通常是通过机械轴的运动,循环地完成周期性动作,因此采集到的工业机器人机械轴的运行数据具有时间连续性和周期性的特点。随着机器人运行时间不断延长,机械轴渐渐老化,不同周期运行数据之间的相似性距离会越来越大,通过相似性距离的变化趋势来衡量机械轴的退化趋势是合理的。
使用MPdist 算法对数据作相似性比对,按数据采集的时间先后,标记数据文件为t1-tn,按时间先后顺序,以t1时刻的数据作为基准,依次将t2至tn时刻的数据与基准数据进行相似性比对,依次得到比对距离,记为MP 距离,即得到一组基于时间的MP 距离变化数组,具体比对过程如图2所示。此数组中的数据具有一定的单调性趋势,并与机器人实际运行状态的退化趋势相符,因此,使用MP 距离来衡量机械轴的健康程度,进而构建健康指标(HI)曲线。基于MPdist 的健康指标构建方法步骤如下:
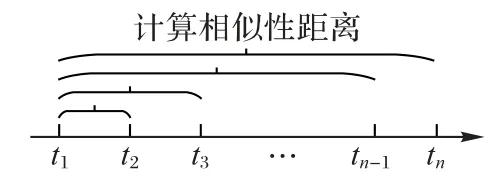
图2 相似性比对示意图Fig.2 Schematic diagram of similarity comparison
1)选定平稳运行时期中t1时刻的k个动作周期老化变量数据,设为比对基准时间序列T1,将退化数据集的老化过程数据的k个动作周期运行数据设为待检测时间序列T2,设置比对子序列的时间窗口大小为l个动作周期长度L。
2)依次输入退化数据集中标记的t2至tn时刻的数据,计算相似性比对距离,即MP距离,依次保存。
3)得到每个变量基于时间线上的MP距离变化数组。
4)对每个变量的MP距离变化数组进行差分平滑处理。
5)划分失效数据与老化过程数据,计算健康指标值。
6)得到每个运行变量的健康指标(HI)曲线。
该方法具有以下特点:1)以动作周期为单位衡量退化程度,可以保证机械轴动作完整性信息,构建的健康指标更贴切机械轴运行特点;2)能自适应地比对动作周期数据,无需手动对齐周期的起点;3)以偏离程度来构建健康指标,属于无监督的方式,不需要大量专家经验和人工标签,节省了成本。
算法评价选用健康指标评价常用的单调性、鲁棒性和趋势性作为评价指标,单调性、鲁棒性和趋势性[21]的计算分别如式(2)~(4)所示。
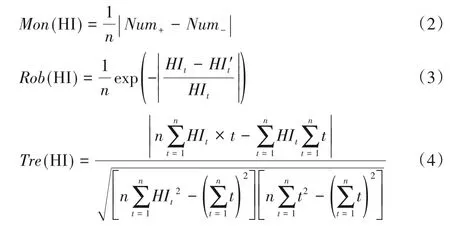
其中:Mon(HI)是单调性指标;Num+表示HIt与HIt-1之差为正数的个数,同理可得,Num-表示HIt与HIt-1之差为负数的个数;n代表HI 的个数;Rob(HI)是鲁棒性指标;HIt代表t时刻的HI 值,代表进行平滑分解后的残差值;Tre(HI)是趋势性指标。
2 基于MPdist-LSTM的剩余寿命预测
工业机器人机械轴退化过程是一个逐渐老化的过程,机器人的历史运行情况变化过程会影响此时此刻的机械轴运行情况,使用LSTM 网络可以对机器人运行数据的时间序列特征、滞后性和随机性进行深入挖掘。LSTM网络是一种改进的循环神经网络(Recurrent Neural Network,RNN)[22],然而当输入时间序列长度过长时,RNN 存在梯度消失和梯度爆炸的问题,为此,本文使用设置了“门”和“开关”实现时间记忆功能的LSTM神经网络。LSTM的网络结构[23]由三个“门”和记忆细胞组成,三个“门”分别为:输入门、遗忘门、输出门。输入门用来控制当前时刻神经单元的输入信息,遗忘门用来保留上一时刻神经单元中存储的历史状态信息,输出门用来控制当前时刻神经单元的输出信息。
传统的利用长短时记忆网络的剩余寿命预测方法通常是直接将数据输入模型进行模型训练,预测剩余寿命。为了利用MPdsit相似性度量方法对数据进行退化特征提取并构建健康指标,本文将得到的健康指标用来训练LSTM 网络模型后得到训练好的MPdist-LSTM模型(如算法2所示),在此基础上进行机械轴健康状态识别与剩余寿命计算,具体框架如图3所示。使用MPdist-LSTM 模型进行寿命预测主要分为两步:基于历史老化数据集的训练阶段和基于在线监测数据的预测阶段,流程如图4所示。
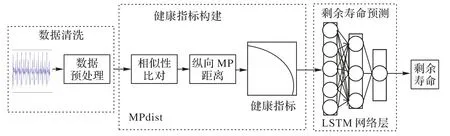
图3 基于MPdist-LSTM的剩余寿命预测框架Fig.3 Framework of remaining useful life prediction based on MPdist-LSTM
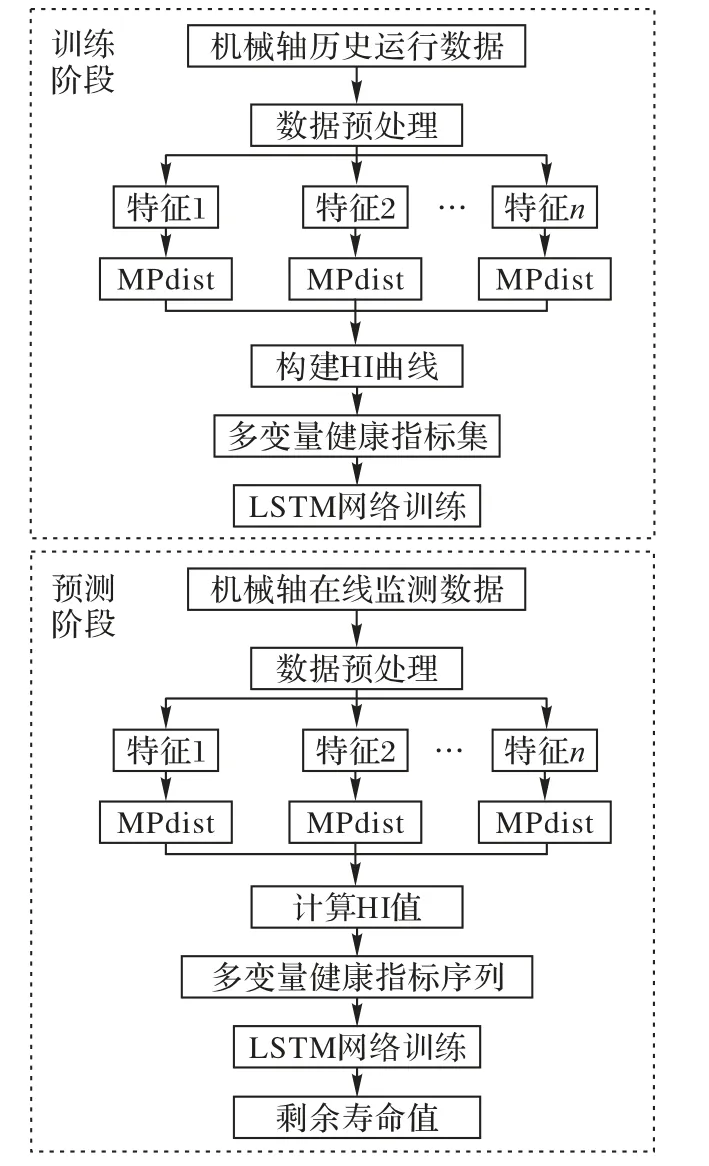
图4 健康指标构建与剩余寿命预测流程Fig.4 Flow chart of health index construction and remaining useful life prediction
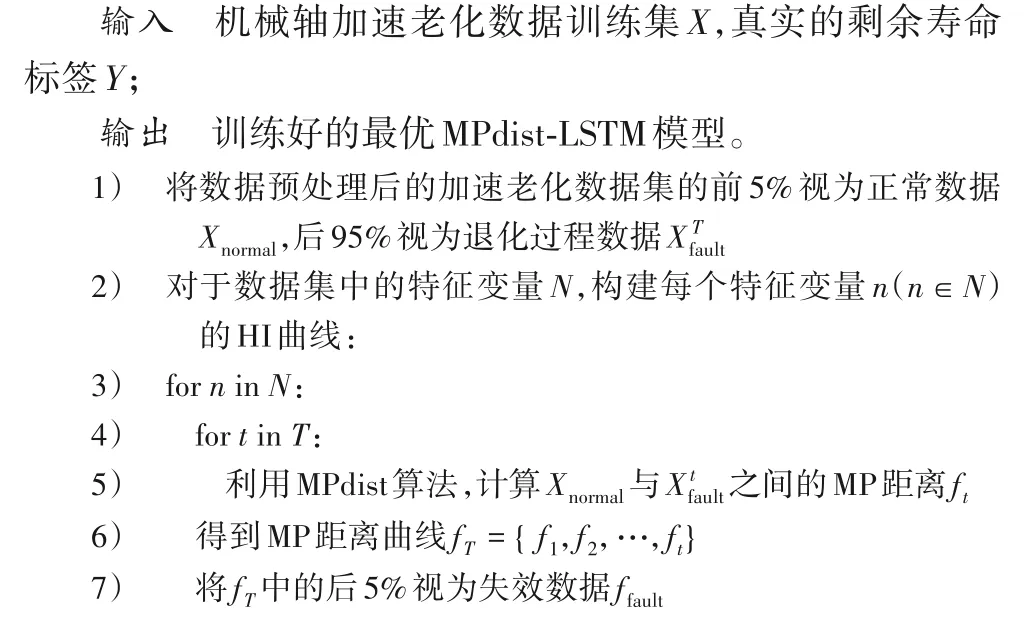
算法2 MPdist-LSTM模型。
a)训练阶段。
算法评价选用三种评价回归模型预测效果优劣程度的统计量作为模型性能评价指标[24],分别为平均绝对误差(Mean Absolute Error,MAE)、均方根误差(Root Mean Square Error,RMSE)和决定系数(R-Square,R2)。MAE 表示所有真实值与预测值之间偏差的平均绝对值,RMSE 表示真实值与预测值误差平方的均值,MAE 和RMSE 越小,模型的预测误差越小,预测精度越高;反之亦然。R2表示衡量模型预测未知样本的效果,当R2数值越接近1,模型的拟合效果越好,预测精度更高;反之亦然。本文使用RUL 预测误差区间(Error Range,ER)、早预测(Early Prediction,EP)和晚预测(Late Prediction,LP)作为评价指标来进一步评估RUL 的预测结果。早预测和晚预测的定义如图5所示。预测误差如式(5)所示:

图5 早预测和晚预测示意图Fig.5 Schematic diagram of early prediction and late prediction

当RULerror≥0 时,记为晚预测;RULerror<0 时,记为早预测。
在实际应用场景下,早预测和晚预测影响程度不同,在一定程度上,早预测可以为机械轴提供预警,而晚预测可能带来一定的损失,相较于晚预测,更偏好于早预测。
3 实验与结果分析
3.1 数据采集
根据工业机器人的设计,驱动器会提供电流和电压等信号,而这些信号与电机输出的扭矩和转速关系密切;同时有些驱动器也提供编码器信号,而此信号常用于机器人位置反馈。当齿轮断裂、连接装置脱落和反馈装置异常等机器人故障发生时,会在驱动器电流、电压和编码器等信号中有所反映。
实验采用某公司六轴工业机器人进行加速老化实验,建立加速老化实验数据集。实验的工业机器人如图6 所示,该型号机器人本体重量轻,内部运动惯量小,采用高速电机结合内旋转功能实现快速冲压,常用于上下料、搬运、打磨等实际应用场景。实验设置3 台机器人,负载为6 kg,运行速度达到100%,执行老化实验跑机程序,连续跑机一个月,采集机器人多个运行变量数据,所有数据变量符号定义如表2 所示。包括9 个变量,采样频率为4 ms。为减少数据冗余,每隔4 h 抽取一次数据作为实验数据,数据包含每台机器人500 多万条数据,900 多个动作周期。数据分析工具采用pycharm 和jupyter book。

表2 变量名说明Tab.2 Description of variable name
图6 某公司六轴工业机器人Fig.6 Six-axis industrial robot of a company
3.2 健康指标构建测试分析
首先对采集到的9 个变量数据进行分析,根据专家经验和统计分析,先筛选掉指令位置(pcmd)、指令力矩(tcmd)、指令加速度(acmd)这三个具有周期不变性的变量;然后使用PCA 方法进行特征降维并结合Pearson 相关系数,筛选出反馈力矩(tfb)、反馈速度(vfb)和位置误差(pe)这三个能反映出老化趋势的变量作为老化特征变量。根据MPdist算法输入参数特点,输入两条待比对的时间序列T1和T2以及比对的子序列长度L。
由于MPdist算法可以容忍两条时间序列的起点为随机起点,所以输入数据无需周期对齐。为探索最佳时间序列T1和T2与L之间的长度关系,以1 号机器人2 轴的反馈力矩为例,分别比对了T1和T2与L为不同比率,计算MP 距离的单调性、鲁棒性和趋势性,结果如表3所示。
由表3可知,当T1和T2与L的比率为5∶1时,MP距离曲线单调性和鲁棒性最好,且随着比率的增加,算法复杂度更高,而MP 距离曲线的单调性和鲁棒性没有明显变得更好的趋势。因此,实验选择MPdist算法的输入参数设置:对比序列T1和T2为5 个动作周期数据,子序列长度L为一个动作周期长度。依次将各个老化变量的退化数据与正常数据输入MPdist算法进行相似性度量,计算得到MP 距离。以反馈力矩(tfb)为例,参数设置示意图如图7所示。
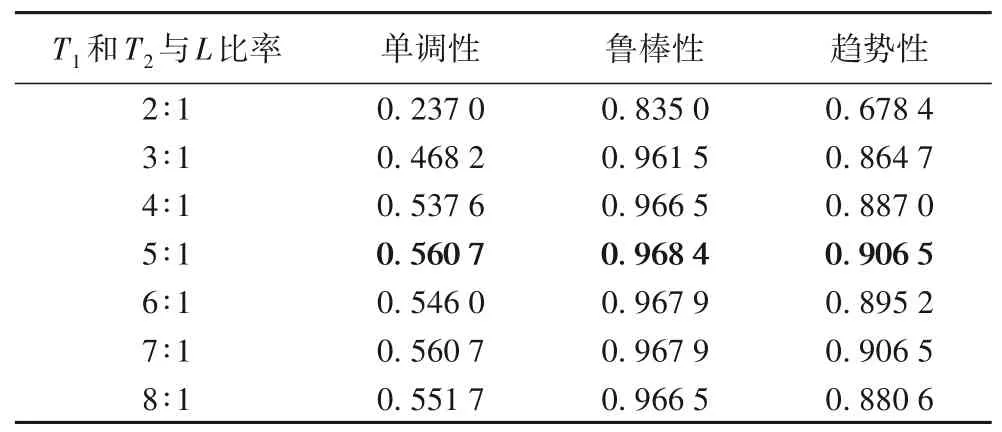
表3 不同比率的MP距离曲线评价结果对比Tab.3 Comparison of evaluation results of MP distance curves with different ratios
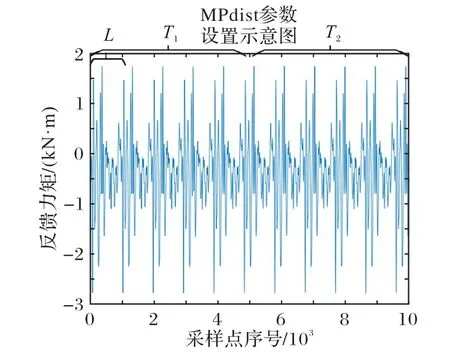
图7 反馈力矩的MPdist相似性度量示意图Fig.7 Schematic diagram of MPdist similarity measurement of feedback torque
以1 号机器人4 轴反馈力矩(tfb)、反馈速度(vfb)和位置误差(pe)为例,使用MPdist 算法依次计算各变量的MP 距离,为减少随机波动性对数据的影响,对曲线进行差分平滑法构建出平滑后的MP 距离曲线。平滑后的反馈力矩(tfb)、反馈速度(vfb)和位置误差(pe)的MP距离曲线如图8所示。
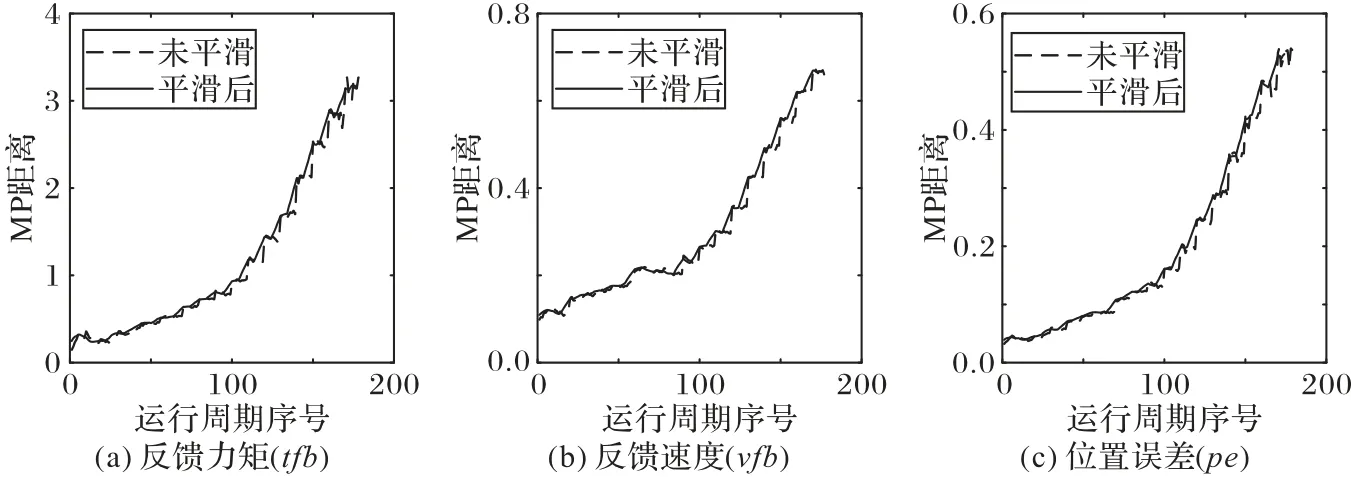
图8 平滑后多变量MP距离曲线Fig.8 Smoothed multivariable MP distance curve
实验将比对距离的后5%的数据视为机械轴已完全老化的数据,定义为失效数据,经过老化过程数据特征与失效数据特征作差可以得到健康指标值,计算方法如式(6)所示。

其中:ft为实时数据的MP 距离;ffault为失效数据的MP 距离;T为数据点MP距离的个数;HIt为第t点的健康指标值。
以4 轴的反馈力矩(tfb)为例,通过以上步骤计算出三台机器人的反馈力矩HI数据曲线如图9所示。
由图9 可知,三台机器人退化趋势有明显的差异,1 号机器人4轴的HI曲线下降得最快,表明1号机器人4轴退化相对快;2 号和3 号机器人4 轴的HI 曲线较1 号机器人下降较缓慢,表明2 号和3 号机器人4 轴退化相对较缓慢,实验数据与实际相符。图9 结果表明,本文构建的健康指标可以较好地反映出机械轴真实的退化趋势。
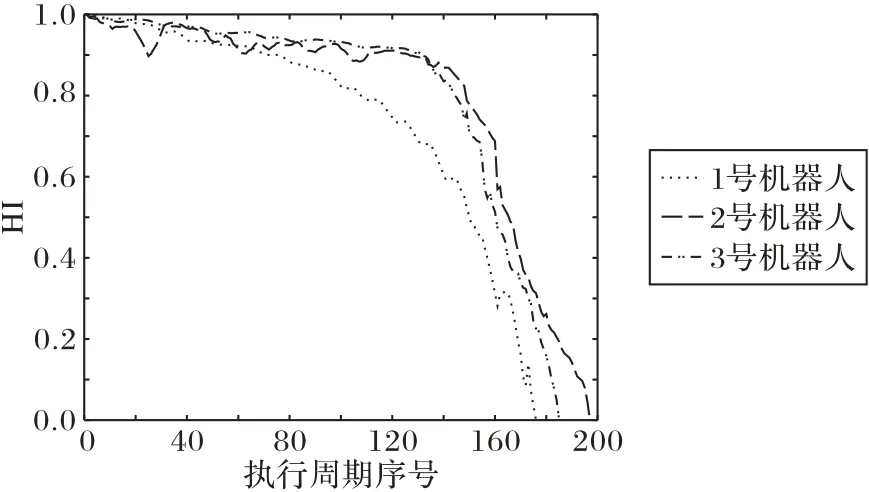
图9 三台机器人4轴反馈力矩的HI曲线Fig.9 HI curves of four-axis feedback torque for three robots
为进一步验证所构建健康指标的有效性,利用常用的单调性、鲁棒性和趋势性作为构建的健康指标的评价指标,并将常用的时间序列相似性比对方法与基于MPdist的方法进行比较,结果如表4所示。由表4可知,基于MPdist、DTW、ED 和时域特征值(Time Domain Eigenvalue,TDE)四种方法构建的健康指标鲁棒性相差较小,但基于MPdist方法构建的HI单调性和趋势性最好,分别为0.5607和0.9065,相较于其他方法分别至少提高了0.07 和0.13;基于DTW 方法构建的HI 曲线鲁棒性最好,但单调性和趋势性不足;基于ED 构建的HI曲线单调性、鲁棒性和趋势性都不足。
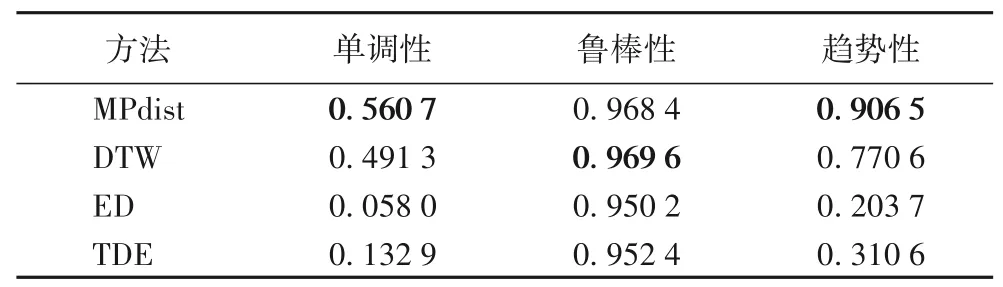
表4 健康指标评价Tab.4 Health index evaluation
机器人的机械轴执行动作具有一定的执行周期,每个执行周期执行时间有差异,且周期之间有停顿,而这样的数据特点更符合MPdist方法共享更多相似子序列的序列更相似的特点,基于MPdist方法构建的健康指标的评测效果更好。
3.3 剩余寿命预测实验分析
经过专家评估和经验[25-26],以及实验分析结果可知,在进行剩余寿命标注时,将机械轴的退化分为两个阶段,如图10所示。机械轴运行数据训练集中的前30%变化平缓,退化趋势不明显,将其设置为平稳运行状态,剩余寿命为1。随着老化实验的进行,机械轴逐渐发生退化,进入退化阶段,后70%的数据设置为退化状态,随着真实运行时间的推移,剩余寿命从1到0依次减少,直至完全失效为0。
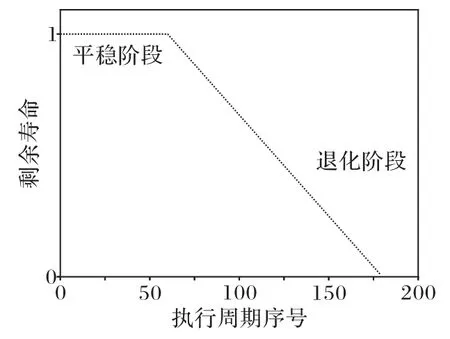
图10 剩余寿命标注示意图Fig.10 Schematic diagram of remaining useful life marking
基于构建好的反馈力矩(tfb)、反馈速度(vfb)和位置误差(pe)将健康指标(HI)输入LSTM网络模型中进行训练,数据集中的样本以0.6∶0.2∶0.2 划分训练集、测试集与验证集,经过调优实验后,选择预测模型的网络结构由两层LSTM 结合两层全连接层组成。其中,两层LSTM 网络的隐藏神经元个数分别为128 和64,迭代次数(epochs)为200,学习率为0.01;两层全连接层的神经元个数分别为32 和1,使用激活函数为ReLU(Rectified Linear Unit),神经网络层的输入输出结构如图11所示。

图11 神经网络输入输出结构Fig.11 Structure of input and output of neural network
LSTM 时间步长的调整过程如表5所示,时间步从3~6,预测效果逐渐变好;从6~20,预测效果逐渐变差。因此,LSTM预测模型的参数选择时效果最好的时间步长为6,迭代次数为400。为了验证基于MP 距离构建健康指标的有效性,将验证集中的34 个测试样本输入训练好的模型进行剩余寿命预测,比较MP 距离、DTW 距离、时域特征值结合LSTM 网络、MPdist 结合RNN 以及LSTM 等方法进行剩余寿命预测的效果,基于MAE、RMSE和R2三种回归预测评价指标和基于RUL预测误差区间、早预测和晚预测等评价指标的评价结果如表6所示。
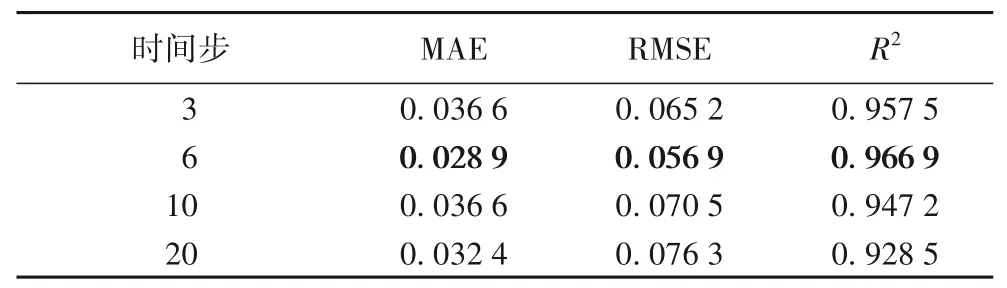
表5 LSTM网络时间步调整评价Tab.5 Evaluation of LSTM network time step adjustment
由表6 给出的34 个测试样本的预测评价结果可知,使用基于动作周期退化相似性构建健康指标之后的预测结果明显优于未考虑动作周期退化、直接使用原始数据输入LSTM 网络的预测结果。基于MP 距离健康指标的剩余寿命预测模型的MAE 为0.0289,RMSE 为0.0569,R2为0.9669,RUL 预测的误差区间为[-8,12],其中早预测个数为19,晚预测个数为13,均优于基于DTW 距离和基于时域特征值健康指标的预测模型,在实际工况下,为了避免故障的发生,更偏好于早预测。与MPdsit-RNN 预测结果相比,MPdist-LSTM 预测的各项评价指标也更优,基于MPdist-LSTM 的剩余寿命预测结果可视化如图12所示。因此,本文构建的MPdist-LSTM框架是有效的,基于MP 距离构建的健康指标可以有效衡量机械轴的退化水平和预测机械轴的剩余寿命。
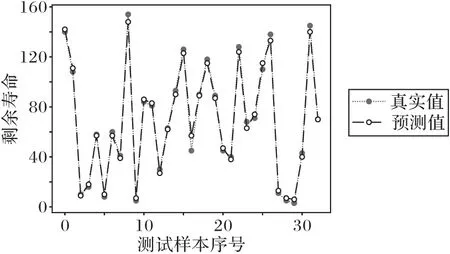
图12 MPdist-LSTM预测结果Fig.12 Prediction results of MPdist-LSTM
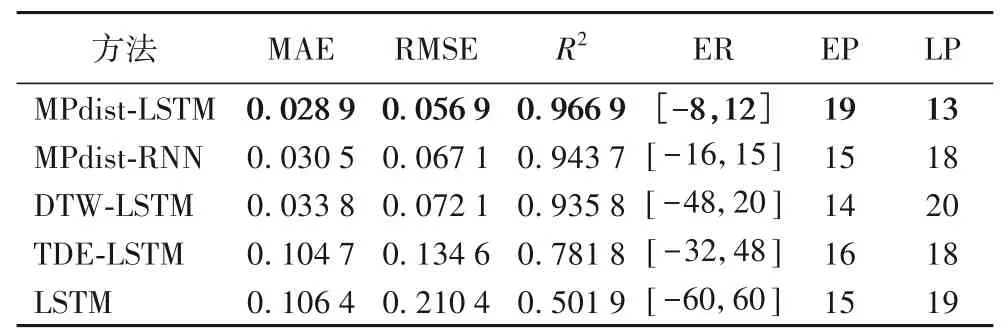
表6 剩余寿命预测评价Tab.6 Evaluation of remaining useful life prediction
4 结语
针对工业机器人机械轴健康管理方面存在的低效、低精度问题,本文提出了基于动作周期退化相似性度量的机械轴健康指标构建方法,先使用MPdist 方法计算不同退化时期动作周期之间的偏离程度衡量退化水平,再结合LSTM 网络进行剩余寿命预测。在某公司六轴工业机器人加速老化实验数据集上进行的实验结果表明,本文方法能准确地构建健康指标并有效地预测剩余寿命。本文主要是在单一工况下进行探索,未考虑变工况情况,未来将继续探索变工况条件下机械轴的退化状况,研究新的面向工艺的工业机器人预测与健康管理方法。
猜你喜欢
现代英语(2021年18期)2021-11-22
当代工人(2020年8期)2020-05-25
作文评点报·低幼版(2020年3期)2020-02-12
华人时刊(2018年17期)2018-12-07
小溪流(画刊)(2017年12期)2018-01-10
奥秘(2017年12期)2017-07-04
雪莲(2017年2期)2017-05-12
环球市场信息导报(2017年1期)2017-04-08
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
数理化学习·高一二版(2009年2期)2009-03-30