卫星转发式系统地面站设备时延测量方法
2021-12-07 07:45荆文芳
电子设计工程 2021年23期
苏 瑜,荆文芳,宋 静
(1.中国科学院国家授时中心,陕西西安 710600;2.中国科学院大学,北京 100049)
2011 年,卫星导航试验系统在中国区域定位系统(China Area Positioning System,CAPS)的基础上开始建设,其为BDS(北斗导航卫星系统,BeiDou Navigation Satellite System)的技术验证平台。经过5年的努力,BOTP 系统于2016 年建成,并进行了测试。评估验收工作于2017 年8 月底完成[1]。目前认为CAPS 系统是卫星导航试验系统的初期阶段。卫星导航试验系统作为BDS 的测试平台,具有独立的导航、定位和定时功能,是我国自主研发的新型卫星导航系统[2]。与GPS、BDS、GLONASS 和GELILEOG之类的传统GNSS 系统相比,卫星导航试验系统不需要在卫星上安装原子钟,并且由于导航信号是在地面控制站产生的,因此可以在地面站中使用更高稳定性的原子钟[3]。卫星导航试验系统与全球卫星导航系统的导航信号从卫星上的产生不同,卫星导航试验系统导航信号由地面主控站产生,发送给卫星,因此信号传输多了一条从地面到卫星的上行链路,并且经过卫星转发器转发,用户接收到类似于GPS的直发信号[4]。从BOPT 系统信号的传输物理过程来看,信号经过了地面站上行设备、空间传播链路到卫星转发器,由卫星转发后经过下行空间传播链路到用户接收机,直至用户接收机解算输出[5]。无论对于用户接收机还是主控站综合基带来说,多了一条上行链路,因此对其测量的星地距离都会产生误差,对于授时、定位、测速都是不可忽略的误差项。所以对于地面站上行设备时延和下行设备时延的测量至关重要。
对于地面站设备时延的测量校准,文献[6]通过专用时延测量设备对天线以下的设备时延进行准确测量,可以溯源到标准仪器,便于不同时间、不同位置的设备来进行比对,但其没有考虑天线的时延。文献[7]设计了一种外环设备时延测量方法,但是其中用到的模拟转发器的时延不能很好地扣除。一般GPS 校准和移动站是一种相对时延测量方法,要求用于测量的基准设备在搬移前后具有较高的时延稳定性[8-10]。文中详细阐述了BOPT 系统地面站设备时延的概念,采用具有输入驻波小、噪声底、频带宽、频率稳定性高的梳状谱发生器(SMC+PHASE)来校准矢量网络分析仪(简称矢网),并且采用校准过的矢网来进行一部分设备时延测量。地面站链路设备时延通过一部分设备时延根据仪器提前标定和一部分根据设备本身结构计算相结合来确定。基于测量和计算相结合的方法进行了设备时延测量有效性验证和不确定度分析。实验结果表明了该方法的有效性,并计算出一天的不确定度为0.2 ns。
1 卫星导航试验系统构成
BOPT 系统的组成与传统卫星导航系统,如BDS、GPS、GLONASS、GELILEOG 等类似,包括空间星座段、地面控制段和用户接收段[11],系统组成框图如图1 所示。空间星座段主要包含不同卫星组成的定位测距源。地面控制段主要由地面卫星高精度测控及定轨系统、导航信号主控系统以及时频基准系统等分系统组成[12]。用户接收段主要包括各种用户接收机等设备。
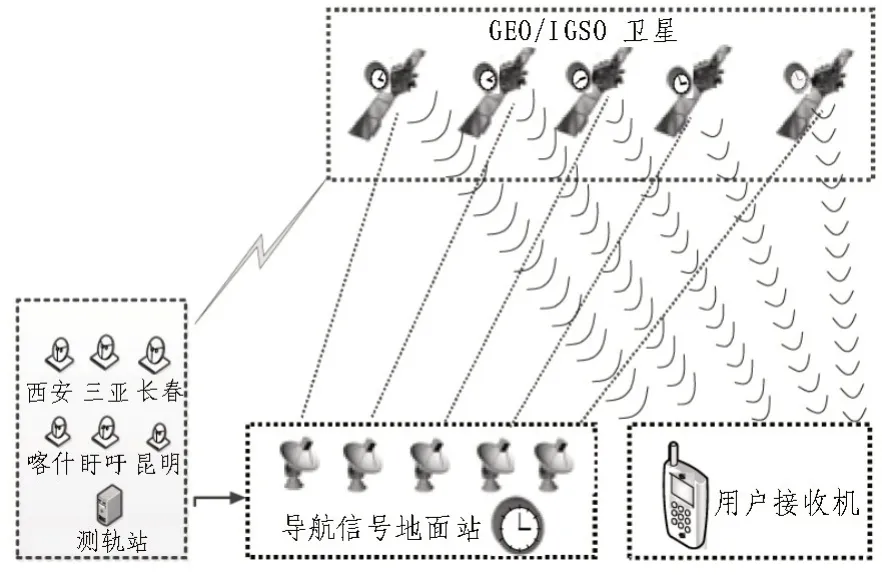
图1 卫星导航试验系统组成框图
文中主要进行BOPT 系统地面站设备时延的测量,所以需了解BOPT 系统的地面站设备组成。图2展示了卫星导航试验系统地面主控站的组成。

图2 卫星导航试验系统地面主控站组成
如图2 所示,地面主控站中时频统一参考源为综合基带提供1PPS 信号和10 MHz 信号,综合基带发出对数据码扩频、调制产生的扩频信号,经上变频器、高功率放大器后到达地面站天线相位中心;然后经过上行空间链路到达卫星天线相位中心入口,通过卫星转发器混频后由卫星天线出口发出;再经过下行空间链路到达地面站天线相位中心;最后通过低噪声放大器、下变频器到达综合基带,形成一个闭环模式。对于从卫星天线出口发出的信号,不但主控站的地面站天线可以接收,任何地点的监测接收机都可通过天线接收。
2 卫星导航试验系统设备时延定义
在连续波跟踪测量系统中,设备中存在惯性元件和尺寸误差,信号通过设备将产生固定时延,这个固定时延叫做设备时延[13]。在卫星导航试验系统中,由图2 可知,根据信号传输链路的不同,设备时延主要分为发射链路设备时延、接收链路设备时延和收发组合设备时延。
2.1 发射链路设备时延
卫星导航试验系统地面站发射链路设备时延定义为信号从综合基带输出口一直到天线相位中心的时延值。发射链路设备时延包括综合基带输出到上变频器电缆时延tu1、上变频器时延tu2、上变频器到SSPA(功率放大器)电缆时延tu3、SSPA 时延tu4、合路单元时延tu5、上行波导时延tu6、馈源发射耦合口tu7、C/L馈源时延tu8以及馈源网络到天线相位中心的时延tu9。如图3所示。发射链路的设备时延由式(1)表示为:


图3 发射链路设备时延示意图
2.2 接收链路设备时延
卫星导航试验系统地面站接收链路设备时延定义为信号从天线相位中心一直到综合基带输入口的时延值,发射链路设备时延包括天线相位中心到C/L馈源网络的时延td1、C/L 馈源时延td2、馈源接收耦合口td3、LNA(场放)时延td4、LNA 到下变频器电缆时延td5、下变频器时延td6、下变频器到基带输入的时延td7。如图4 所示。接收链路的设备时延如式(2)所示:


图4 接收链路设备时延示意图
2.3 收发组合设备时延
在卫星导航试验系统中,地面站综合基带完成信号自发自收的工作方式,收发组合设备时延实际就是发射链路设备时延和接收链路设备时延之和,即T=Tup+Tdown。由图2 可知,卫星导航试验系统地面站存在上行和下行链路,卫星可看作是上行链路信号和下行链路信号的频率转换器。同时,为了测量系统设备时延,在射频部分配置了一个类似于卫星的测试转发器,使信号在地面站可以构成自闭环,以完成系统设备时延测量和信号的地面自验证,这种环路称为射频自闭环链路。射频自闭环链路设备时延可由综合基带进行测量,采用综合基带设备测量设备链路时延最能反映设备时延对系统的影响,而且简单易操作,可为其他设备时延测量方法提供一个验证有效性的基础。
3 设备时延的测量方法
不论是发射链路设备时延Tup还是接收链路设备时延Tdown,都是各个设备时延的组合,所以要测量Tup和Tdown是不可完成的。例如,馈源网络到天线相位中心的时延tu9是根据天线机械结构计算得到的[4]。所以文中主要采用利用矢量网络分析仪测量值tA、部分设备提前标定值tu8和计算值tu9之和的方法完成Tup和Tdown的测量。图5 详细说明了卫星导航试验系统的设备时延测量的具体安排。
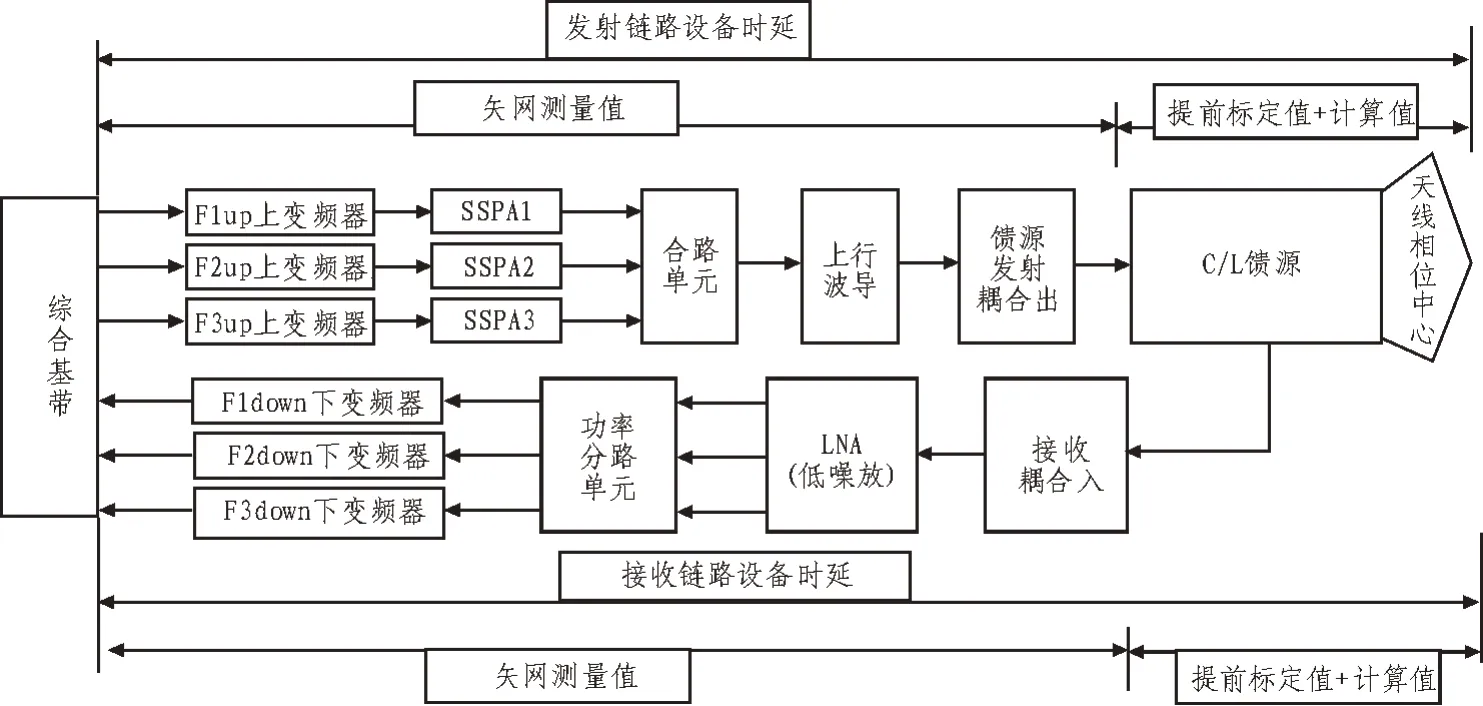
图5 设备时延标定的具体安排
矢量网络分析仪测量值tA由式(3)表示:

3.1 基于梳状谱发生器校准的矢网测量设备时延
梳状谱发生器可生产高精度相位校准信号,在宽带综合时,可将导致设备通道传输不一致的附加相位去掉,从而得到精确的群延迟量值。矢量网络分析仪的测量原理是先测量被测器件的相频响应特性,然后取相位差与频率差的比值来近似微分计算[14]。

矢网最典型的应用是测量同频器件的时延[15],但根据图5 可知,发射链路设备时延中,由综合基带的出口到馈源入口这一链路的时延标定主要采用矢量网络分析仪来完成,这是一个变频的链路时延测量。文中采用梳状谱发生器(SMC+PHASE)校准的矢网时延测量方案,该方法主要是利用梳妆波校准失量网络分析仪接收机的不同频点之间的相位,进而在测量时不需要参考变频设备直接对被测变频设备进行时延的测量[5],并且通过此方法对矢网本身进行校准后,使矢网两个端口在不同频率下工作也能进行高精度时延测量,不必在每次测量之前进行校准。
3.2 地面站基于矢网的设备时延测量实现方法
由式(3)可知,被测量的tA是一条链路,在采用矢网测量时,不可能把被测的两段直接放在矢网的两个端口,所以用时延已知的测试电缆作为测试臂,引入时延零值的概念,测出测试臂的时延总和,作为时延零值,存储在时延校准软件中,并在最终结果中扣除。同时借助于简单的开关网络切换,实现不同频点的切换选通,如图6 所示。

图6 地面站基于矢网的设备时延测量
由图6可知,先用梳状谱发生器对矢网进行校准;其次测量不同链路的设备时延,已知测试臂为2 m和20 m 的电缆时延分别为T1和T2,但是每条链路的长短不同,只用测试臂的长度不可能对每条链路进行测量,所以引入测试用的3 条时延未知电缆,通过两两连接的方式进行测量。经过解三元一次方程得到每个测试电缆的时延,这样增加3 条长度未知的电缆,足够对地面站的设备时延进行测量。其中,测试电缆时延方程为:

根据式(5)解方程得到式(6):

最后,通过开关网络实现不同连接链路的切换选通,得到被测链路的设备时延。如需要加入电缆A 来测量,则被测链路时延可用式(7)计算得到,依次类推,对于不同的链路,采用不同的电缆连接方式利用此方法都可得到链路的设备时延。

其中,T1和T2分别为测试臂2 m 和20 m 的电缆时延;T31、T32和T33分别为电缆A、B、C 的时延值;TVNA1为连接电缆A 和B 使用矢网测量得到的时延和;TVNA2为连接电缆B 和C 使用矢网测量得到的时延和;TVNA3为连接电缆A 和C 使用矢网测量得到的时延和;TVNA为测量链路设备时延时连接电缆为A使用矢网测量得到的时延和;TDUT为被测量的链路设备时延。
4 卫星导航试验系统设备时延测量验证实验
4.1 设备时延测量的有效性分析
利用文中矢网测量链路设备时延的方法,对卫星导航试验系统的一条射频自闭环链路进行测量,则射频自闭环链路的设备时延TIF为从基带输出口一直到卫星模拟转发器入口链路设备时延Ttr、卫星模拟转发器Tter和从卫星模拟转发器出口到基带输入口Tre链路设备时延之和,如图7 所示。射频链路设备时延的测量也可通过综合基带闭环来测量,可以进行使用矢量网络分析仪测量设备时延准确性验证。验证结果如表1 所示。利用矢网测得的Ttr为270.87 ns、Tter为121.29 ns,Tre为228.47 ns,则射频自闭环链路的设备时延TIF为620.63 ns。利用综合基带直接通过射频闭环测得的设备时延为620.43 ns。两种方法得到的射频自闭环链路的设备时延偏差为0.2 ns,说明该实验验证了使用矢量网络分析仪进行卫星导航试验系统的设备时延测量的有效性。

图7 射频自闭环链路设备时延测量示意图

表1 射频自闭环链路的设备时延
4.2 设备时延测量的不确定度性分析
使用矢量网络分析仪测量设备时延的不确定度主要有矢网时延测量的不确定度τVNA、测试臂时延标定的不确定度τtest和测量时受温度影响的不确定度τtemp等。
矢网测量的不确定度由式(4)表示,其中Δφ为矢网相位测量的不确定度[5],Δω为矢网孔径(换算成MHz)。

在此次实验中,矢网型号为N5242A,相位测量的不确定度Δφ为±0.6°,当口径设置为5 MHz 时,τVNA=0.1 ns。
测试臂时延标定的不确定度τtest主要由矢网测量不确定度引起,τtest=0.1 ns。在10~30°C 的测试环境中,对F1down接收链路进行一天的长期观测,图8为在F1down频点处的绝对时延值。这一条链路包括一条长电缆、接收馈源、LNA(低噪声放大器)、下变频器等。这个结果表明,使用矢网测量的时延在100 s 平均时的变化值在0.15 ns 内。

图8 设备时延一天的变化
由于各个不确定度互不相关,所以设备测量的不确定度如式(9)所示。

该实验验证了使用矢网测量设备时延不确定度为0.2 ns,说明所测结果与真值很接近,验证了该方法的准确性[17-20]。
5 结论
在卫星导航试验系统中,地面站设备时延的测量主要采用基于梳状谱发生器(SMC+PHASE)校准的矢量网络分析仪时延测量、部分设备提前标定和计算相结合的方法,并且基于梳状谱发生器校准的矢量网络分析可以对变频链路设备时延进行测量,到达一次校准多次测量的结果。通过实验验证了该方法的有效性、可实施性;最后分析了该方法的不确定度性为0.2 ns。地面站设备时延的确定对卫星导航试验系统的导航、定位和授时精度的提高提供了重要的意义。
猜你喜欢
移动通信(2021年5期)2021-10-25
兰州理工大学学报(2021年1期)2021-03-09
通信产业报(2019年26期)2019-08-30
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
数字通信世界(2017年1期)2017-02-13
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年17期)2016-04-11
数字通信世界(2015年5期)2015-04-04
中国交通信息化(2014年3期)2014-06-05