
基于函数分布特性的智能车辆换道行为识别
2021-12-07 12:37胡鑫
智能计算机与应用 2021年7期
胡鑫
摘 要: 针对目前智能驾驶辅助系统对驾驶人换道意图识别存在的问题,基于函数分布特性分析和层次分析法展开研究。一般将主车与车道线的距离作为换道的指标变量,由于将影像数据作为指标变量的基础数据源时,指标变量受光照和交通基础设施的影响较大,为此,将方向盘转角和车道线距离作为换道行为识别的指标变量,提出一种基于函数分布特性的换道行为识别方法。首先对获取到指标变量进行函数分布分析,确定出相应的换道起止时间,并依据不同环境下获取到的变量可靠程度,采用层次分析法确定出2种指标对识别准确性的贡献度,融合2种变量贡献度构建出换道行为识别规则,并利用实车数据对该识别方法进行验证。结果表明:融合2种指标变量的识别方法可以适应更为复杂的交通环境;当光照、车道标识线清晰可辨识时,车道线距离对识别准确率贡献最大;当车道标识线无法辨识时,方向盘转角占优。
关键词: 换道; 识别; 函数分布; 层次分析法; 贡献度
文章编号: 2095-2163(2021)07-0091-05中图分类号:TP391文献标志码: A
Recognition of intelligent vehicle
lane-change behavior based on functional distribution characteristic
HU Xin
(Shanghai Nanhu Vocational and Technical College, Shanghai 200439, China)
【Abstract】To solve the problem of recognizing the driver's intention to change lanes in the current intelligent driver assistance systems, the study is based on functional distribution characteristic analysis and hierarchical analysis. In generally,the distance between the main vehicle and the lane line is used to be as an indicator variable of lane change behavior recognition. Because the image data is used to be as the basis data source of the index variable data, the index variable is strongly influenced by light and transport infrastructure.The steering wheel angle and lane line distance are used to be as index variables of lane-changing behavior identification in this paper. And this paper proposes a method of lane-changing behavior recognition based on functional distribution. Firstly, the obtained index variables are analysed by functional distribution to determine the corresponding lane changing start-stop time. Then, the distribution of the conditions reliability of the obtained variable on recognition accuracy is determined by analytic hierarchy process. The lane-changing behavior identification rules is established by combination of two kinds of variables contribution. Finally, the real vehicle data is used to validate the identification method. The results show that the identification method combined two kinds of index variables can be adapting in more complicated traffic environment. When the light and lane identification lines are clearly identifiable, the lane distance is dominant to the recognition accuracy. However, when lane identification line cannot be identifie, steering wheel angle is dominant.
【Key words】lane-change; recognition; functional distribution; analytic hierarchy process; contribution
0 引 言
隨着车载辅助驾驶系统的不断完善使得汽车安全性大大提高,而这些辅助系统基础数据来源于各个传感器,包括各种雷达和视觉传感器,驾驶辅助系统大多是通过这些传感器来获取周围环境信息来评估当前的环境安全状况,数据的可靠性直接关系到辅助系统工作的有效性,所以能够准确判断车辆换道行为,为各类驾驶辅助系统提供安全有效的基础数据,对提升道路通行效率、减少交通事故和降低经济损失都是至关重要的,也是安全辅助驾驶领域的研究热点之一。
目前,人工智能技术和机器学习算法是很多专家学者常用来研究这类问题常用的工具,邱小平等人[1]采用了分段离散化的方法对数据进行预处理,由此建立的基于贝叶斯网络的车辆换道模型对换道行为进行识别。杨建坤等人[2]通过驾驶模拟平台采集了不同类型的换道行为数据,运用样本数据训练、测试模型,得到模型能够有效区分安全性换道和风险性换道。陈亮等人[3]采用网格搜索结合粒子群优化算法对支持向量机模型中参数进行寻优标定,利用多分类支持向量机换道识别模型对样本数据进行训练和测试,此模型能够很好地识别车辆在换道过程中的行为状态,为车辆换道阶段的研究提供支持。张宇惠等人[4]采用隐马尔可夫模型的建立与应用,对驾驶员变换车道行为进行分析。杨殿阁等人[5]基于汽车转向运动学推导车辆行驶状态与汽车行驶轨迹之间的映射关系,建立了汽车行驶方向向量模型,提出以车身轴线转角和最大转向盘转角为特征量的支持向量机线性分类器,并运用拉格朗日数乘法和二次规划算法求解该最优分类问题。徐婷等人[6]将车载参数和车辆位置参数相结合,提出一种能够应用到ADAS的城市道路换道行为识别模型。黑凯先等人[7]基于车辆多自由度驾驶仿真平台,采集车辆运行状态参数的相关数据.在不同维度的特征集和多个样本时窗状况下,运用随机森林决策树方法连续识别驾驶员的换道行为。商艳等人[8]采用瞳孔变动视觉特征的方法对驾驶人换道意图进行识别。在以上的机器学习算法中,贝叶斯网络模型由于输入变量相关性导致的问题对换道识别结果影响较大;神经网络模型存在学习时间长、易陷入局部最优等缺点;而支持向量机模型可以避免其他算法的缺陷与不足,但其惩罚参数和核函数参数不易确定。为了在简化换道行为识别过程的同时,提高换道行为识别精度,本文拟在传统的方法上进行改进。
目前常见的换道行为识别[9-10]系统都是基于单一数据来源,最为可靠的就是主车与车道线的距离,而距车道线距离数据的获取一般是通过影像设备[11],这些设备受光照和交通标识影响较大,当遇到夜晚或者无车道线标识的路段时,这些系统基本处于瘫痪状态,无法给驾驶员提供必要的辅助决策,虽然夜视系统的出现大大拓展了换道辅助系统的应用范围,但夜视系统成本高;有些系统为了避免影像数据的弊端,进而将方向盘转角作为换道行为的唯一指标特征,换道时的方向盘转角与车辆直线行驶时的差异性并不明显。现如今,市场上方向盘转角传感器的精度一般在2°左右,而中高速换道时方向盘转角也就3°~5°之间,当遇到路面颠簸时,方向盘转角数据也有大幅度的变化,有时车上装载质量较大或左右分布失衡时,方向盘转角也有变化,因此,要在降低成本的同时提高换道识别系统的有效工作范围,需融合车道线距离和方向盘转角两种数据,采用更为有效的识别方法。为此,本文将车道线距离和方向盘转角速率作为换道行为识别指标,利用函数分布以及层次分析法对换道行为进行识别,并采集实车试验数据对该方法进行了验证。仿真结果表明,该方法能够适应更为复杂的交通环境。
1 换道行为指标变量分析
1.1 方向盘转角
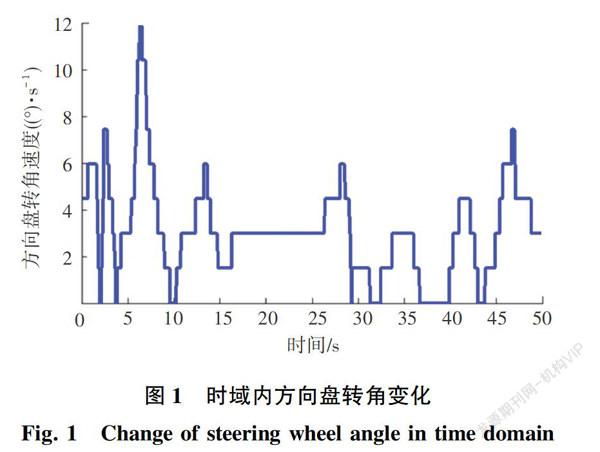
不同于影像设备获取到的主车距车道线的距离数据,方向盘转角数据的获取不受道路标识线和光照条件的影响,在任何情况下均可得到,但方向盘转角受路面不平度影响较大,同时,采集方向盘转角数据所用的传感器精度也对测试结果有一定影响。本次试验用到的方向盘转角传感器精度为1°,从方向盘转角随时间变化图中可以看出,方向盘转角数据呈現出阶跃变化的形式,这主要是受到数据采集传感器精度和采样频率影响。本次试验用到的方向盘转角传感器的精度已经很高,若再采用精度更高的设备,成本增加很多,后期应用将会受到成本制约。图1是一段时间序列中方向盘转角的变化情况,采集时间为50 s,数据采样频率为10 Hz。
图1中,换道行为发生在0~5 s之间,而7 s时方向盘转角反而大于换道时方向盘转角的变化,由此可见仅仅通过判断时域内方向盘转角的变化是无法有效识别驾驶人换道行为的。如果将方向盘转角数据直接映射到频域内,而又无法得到时间信息,如此一来,换道行为识别就失去了意义。因此,需要寻求一种能够在时频和频域表现方向盘转角变化的方法,那就是函数分布。
1.2 Wigner_Ville分布
Wigner-Ville分布(简称 WVD)是典型的二次型变换,可定义为信号瞬时相关函数的傅立叶变换,反映了信号瞬时时频关系。对于单分量线性调频信号而言,WVD在时频平面上的投影为一条直线,即频率随时间呈线性变化关系。由于WVD分析没有引入窗函数,避免了其他时频变换由于需要窗函数而带来的频率分辨率和时间分辨率的相互牵制[12-13]。WVD的数学定义如下:
其中,xt为连续的时间信号;t为时间;f为频率;Wxt, f即为信号xt的WVD分布。很显然,Wxt, f是时间和频率的函数,能够反映出原始信号的时频两域的特征。
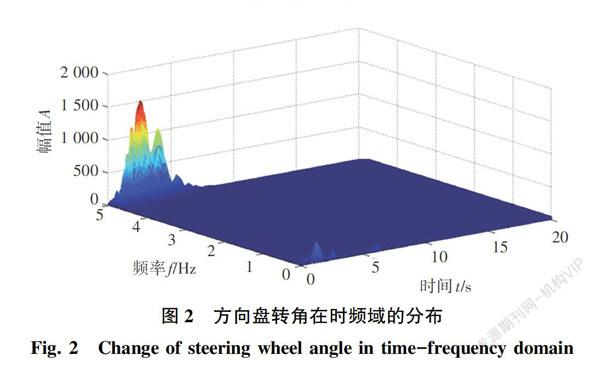
图2是一段时间序列内方向盘转角的WVD分布,其中,方向盘转角数据跟图1数据相对应。从图2中可以看出在时频域内,换道时方向盘转角与直线行驶有明显的差异,从时频域内可以容易找到相应的起止时刻,即换道行为发生在0~5 s间。由此可见,利用WVD可以很好地反映方向盘转角数据在时频域的分布特征,且能够有效识别出换道行为。
1.3 车道线距离数据分析
此处车道线距离指的是车辆左右前轮距车道线的距离,由于车道宽度一般为375 cm,因此,左右车道线距离和主车左右轮距存在如下关系:
其中,DL、DR、B分别为主车左前轮距左侧车道线距离、主车右前轮距右侧车道线距离以及主车左右轮距,单位均为cm。在实际应用时,只选单侧的车道线距离即可。图3是主车以20 m/s的车速,采集到的一段时间序列的单侧车道线距离数据,包括车道线可识别和车道线无法识别这2种情况。其中,在车道线可识别的情况下,图3中的红色曲线呈现连续递增的变化趋势,而在车道线无法识别的情况下,图3中的绿色曲线出现阶跃,变化缺少规律性。
从图3中可以看出,当车道线清晰可辨识时,车道线距离在时域内就表现出较强规律性,无需分析其时频特性就能准确识别换道行为。图3在起始阶段,车道线是可见,试验是在10 s位置时用与沥青颜色相近的纸板挡住车道线。从图3可以看出,当车道线消失后,传感器采集到数据基本无效,由于车道线数据的获取渠道是影像传感器,当这些传感器无法准确捕捉到图像中车道线信息时,暂时会保持原状态,当捕捉到与路面反色较大的其他目标时,传感器会随机捕捉这些信息,并经过转化和辨识输出车道线数据。图3中,20 s时车辆横向位移为50 cm,此刻车辆的横向速度达到了0.5 m/s,此时的车速为20 m/s,很显然,车辆的当横向加速达到0.5 m/s时,会出现非稳态工况,车辆极有可能翻车,这也表明,此时采集到的数据不可信,若此时将车道线距离作为换道行为的唯一指标特征时,根本无法真实反映车辆当前的行驶状态。因此,结合不受车道线标识清晰度影响的方向盘转角来识别换道行为显得尤为重要。
2 换道行为识别
经过上述分析可知,在光照条件好、车道线清晰可辨识的情况下,车道线距离有规律可循,能够用来作为换道行为识别的有效判断指标之一;当车道线无法辨识时,车道线距离则不能作为换道行为识别的有效判断指标,而方向盘转角数据在时频域有规律可循,可以用来作为换道行为的补充性评价指标。所以为降低仅采用车道线距离或方向盘转角作为单一指标变量所带来的识别误差,本文融合2种指标变量,通过层次分析法对2种指标进行权值分配,最终确定换道行为的综合性评价指标。
2.1 层次分析法
层次分析法是指将一个复杂的多目标决策问题作为一个系统,将目标分解为多个目标或准则,进而分解为多指标的若干层次,通过定性指标模糊量化方法算出层次单排序和总排序,以作为目标多方案优化决策的系统方法。层次分析法是将决策问题按总目标、各层子目标、评价准则直至具体的备投方案的顺序分解为不同的层次结构,然后用求解判断矩阵特征向量的办法,求得每一层次的各元素对上一层次某元素的优先权重,最后再用加权和的方法递阶归并各备择方案对总目标的最终权重,此最终权重最大者即为最优方案[14]。层次分析法主要工作就是确定判断矩阵B,矩阵元素一般用标度进行描述,详见表1。
判断矩阵B有如下特征:
最终通过一致性判定,若随机一致性指标达到可接受范围,表明判斷矩阵构造合理。
2.2 车道线清晰可辨识时换道行为识别
在换道行为识别时,首先采用层次分析法确定2种指标的权值,根据2种指标单独判定结果并结合权值最终给出识别结果。这里,将驾驶行为分为2类,即换道和直行,换道行为记为1,直线行驶行为记为0,方向盘转角通过设定阈值,采用WVD确定换道行为(起止时刻);车道线距离直接根据其在时域内变化确定换道行为(起止时刻)。具体判定规则如下:
其中,P方向盘、P车道线距离为单纯采用方向盘转角或车道线距离对换道行为的识别结果,值为0或1;α、β分别为层次分析法确定权值;若P输出≥0.5,判断结果为换道行为,否则为直线行驶。
在车道线清晰可辨识时,车道线距离指标占主导地位,由此构造的判断矩阵为B1:
该判断矩阵通过了一致性检验,最终确定车道线距离和方向盘转角的权值分别为0.75和0.25。
为了验证综合性评价指标的有效性,需要对其进行验证,通过试验共采集到2 048个换道行为样本。首先对车道线可识别的情况进行验证,分别采用3种方法对所有换道行为样本进行识别,3种方法的识别准确率见表2。
单一方向盘转角法即为单纯采用方向盘作为指标变量来进行换道行为识别,单一车道线距离方法与方向盘转角方法一致,融合方法就将方向盘转角和车道线距离作为指标变量,利用式(4)判定准则进行换道行为识别。表2表明,在车道线清晰可见情况下,单一的车道线距离识别法与融合法相近,而方向盘转角识别准确率较低。
2.3 车道线无法辨识时换道行为识别
与车道线清晰可见时所用的换道行为识别方法一样,这里采用3种方法识别结果见表3。由表3可以看出,在车道线无法辨识时,采用融合法能够得到更高的识别准确率。
3 结束语
本文分析了2种单一指标作为换道行为评价指标的有效性,采用二次型变换将方向盘转角变换到时频域,提高了方向盘转角作为换道指标的识别精度。验证了车道线距离指标在不同路面情况下的有效性,最后使用层次分析法对2种换道评价指标加权,得到综合性换道行为评价指标,本文主要结论如下:
(1)在时域内,换道时方向盘转角和直行时区别不大,而在时频域内,换道时方向盘转角和直行时存在较大差异。
(2)当车道线无法辨识时,单纯的车道线距离识别方法基本失效;但在车道线清晰可见时,单纯的车道线距离识别法有很高的识别准确率。
(3)采用融合识别法,无论在车道线是否清晰可见时都有较高的准确率。
通过大量数据验证,可以发现融合2种指标变量的识别方法可以适应更为复杂的交通环境,具有较高的换道行为识别准确率,能够作为智能驾驶辅助系统的基础数据。本文也有不足之处,没有充分考虑更为复杂的道路环境和驾驶员模型,比如在路面不平度较大,各型传感器精度不高的情况下,想要获取到精度较高的评价参数仍存在一定困难。在日后的研究中,需要完善理论,实现在各种情况下对驾驶员换道行为的辨识,最终提高辅助驾驶的安全性能。
参考文献
[1]邱小平,刘亚龙,马丽娜,等. 基于贝叶斯网络的车辆换道模型[J]. 交通运输系统工程与信息,2015,15(5):67-73,95.
[2]杨建坤,熊坚,徐东霞. 基于支持向量机的车辆换道行为识别仿真研究[J]. 贵州大学学报(自然科学版),2020,37(5):120-124.
[3]陈亮,冯延超,李巧茹. 基于Multi-class SVM的车辆换道行为识别模型研究[J]. 安全与环境学报,2020,20(1):193-199.
[4]张宇惠,张凤登. 基于HMM模型的驾驶员换道行为识别分析[J]. 电子科技, 2016, 29(6): 34-36.
[5]杨殿阁,何长伟,李满,等. 基于支持向量机的汽车转向与换道行为识别[J]. 清华大学学报(自然科学版), 2015, 55(10): 1093-1097.
[6]徐婷,温常磊,张香,等. 基于GMM-CHMM的城市道路换道行为识别[J]. 交通运输系统工程与信息, 2020, 20(1): 61-67.
[7]黑凯先,曲大义,周警春,等. 基于随机森林决策树的行驶车辆换道行为识别[J]. 青岛理工大学学报, 2020, 41(1): 115-120.
[8]商艷,朱守林,戚春华. 基于瞳孔变动视觉特征的驾驶人换道意图识别_商艳[J]. 计算机仿真, 2020, 37(8): 77-81.
[9]袁伟,张亚岐. 支持向量机在换道行为识别中的应用研究[J].计算机工程与设计,2013,34(2):643-648.
[10]刘永涛,乔洁,魏朗,等. 危险驾驶行为识别[J]. 计算机工程与设计,2014,35(4):1322-1326.
[11]刘永涛,王鹏,魏朗,等. 基于DSP的前方车辆位置关系辨识研究[J].计算机工程与设计,2014,35(5):1738-1741.
[12]席有猷,郝建华,程乃平,等. 一种魏格纳-威利分布交叉项提出新方法[J]. 河北科技大学学报,2012,33(6):506-510.
[13]康海英,栾军英,郑海起,等. 基于小波包变换和伪魏格纳分布的轴承故障诊断[J]. 军械工程学院学报,2004,16(5):5-8.
[14]胡群,刘文云. 基于层次分析法的SWOT方法改进与实例分析[J]. 教学实践与认识,2009,32(3):68-71.
作者简介: 胡 鑫(1984- ),女,硕士,讲师,主要研究方向:汽车电控、新能源汽车、人工智能。
收稿日期: 2020-12-12
猜你喜欢
新班主任(2019年12期)2019-01-13
经济研究导刊(2017年3期)2017-03-23
合作经济与科技(2017年2期)2017-01-03
商(2016年27期)2016-10-17
企业导报(2016年10期)2016-06-04
