基于谱熵梅尔积和改进VMD的轴承故障预警
2021-12-09 01:27马小平李博华蔡蔓利韩正化陈泽彭
北京理工大学学报 2021年11期
马小平, 李博华, 蔡蔓利, 韩正化, 陈泽彭
(中国矿业大学 信息与控制工程学院,江苏,徐州 221116)
旋转机械广泛用于工业生产中,其运行状态对设备的效率和生产安全有着重要影响. 而轴承作为其重要部件,对轴承的监测,尤其是通过识别早期故障来减少轴承磨损、失效带来的严重影响,是机械故障处理中至关重要的技术[1]. 因此,对轴承运行状态的监测,特别是早期故障的预警,对设备安全和稳定生产有着重要意义.
传统的故障预警建立在故障形成之后,对故障信号进行特征提取、信号分类. 贾志明等[2]用局部均值法对EMD分解的故障信号特征指标进行处理,通过和阈值对比能有效识别早期故障;郑小霞等[3]用PSO算法优化VMD的分解个数和惩罚因子,能精确提取故障信号微弱特征. 但此类方法没有在故障信号出现初期对其进行捕捉,实时性较差. 对此,本文将语音分析领域中语音端点检测思想加以迁移,提取振动信号的谱熵梅尔积[4](product of spectral entropy and MFCC0, MFPH)特征,利用双门限法检测故障起始点,采集起始点后的振动信号为异常样本,提高模型可信度和泛化能力.
针对轴承故障信号非平稳性强、特征频率易重叠且难以准确提取的问题,采用变分模态分解[5]对信号进行处理. VMD将信号分解转变为约束优化问题,通过迭代求解分量最优的带宽和频率中心,有效抑制了模态混叠. 刘长良等[6]将VMD与SVD结合,提取轴承故障特征;刘尚坤等[7]用互信息对VMD进行改进,增强了早期轴承故障特征提取效果.
轴承发生故障时,振动信号会产生动力学突变. 分解后轴承信号仍会受到随机性运动参数的干扰而难以准确识别,很难完全发挥VMD的优势. 排列熵 (permutation entropy,PE)无需考虑时间序列的实际数值,基于概率对相邻样本进行对比,放大了一维时间序列中的微弱变化,对动力学突变行为更敏感[8],且具有计算快、抗干扰能力强的优势. 郑近德等[9]将PE与LCD结合,有效提取了滚动轴承故障信号特征. 但PE算法对子序列的数值及变化有所忽略,且只考虑单一尺度上动力学突变行为,提取信息有限. 因此,AZIZ等[10]提出了多尺度加权排列熵(multiscale WPE, MWPE),克服了WPE单一尺度的不足,在表征不同尺度下时间序列复杂性上更有优势,鲁棒性更强[11].
本文针对轴承故障预警实时性差,难以精准提取早期微弱故障等问题,利用MFPH检测故障起始点,结合VMD和MWPE在重构故障信号、突出故障特征上的优势,建立了轴承故障预警模型. 基于测试信号和实际信号进行分析,验证了本文方法的有效性.
1 基于MFPH的故障起始点检测
1.1 MFPH原理
梅尔频率倒谱系数[12](Mel frequency cepstrum coefficient, MFCC) 是在Mel标度频率域提取出来的倒谱参数,描述了人耳频率的非线性特性. MFPH结合了MFCC对短时间功率谱包络描述的准确性和抗噪能力,以及谱熵[13](spectral entropy, SE)对低频敏感的特性. 在噪声干扰的环境下,MFPH能区分振动信号正常段和故障段的频率成分,可作为轴承故障起始点检测的重要参数. 对信号x(t),其MFPH计算过程如下.
对信号x(t)分帧加Hanning窗处理,对每帧振动信号xi(t)进行傅里叶变换并计算谱线能量
E(i,k)=|fft(xi(n))|2
(1)
对每帧信号的能量谱经过Mel滤波器组,求和得到能量S(i,m)
(2)
式中:M为滤波器数目;Hm(k)为第m个滤波器.
将每个Mel输出表示为ln[S(i,m)],对其进行离散余弦变换,获取每帧MFCC
(3)
计算第i帧对应的谱熵SE(i)
(4)
式中:i为帧标号;N为帧长度;Pi(k)为归一化的谱概率密度.
为保持与MFCC0维度一致,将SE值同样剔除起始与末尾各2帧,则第i帧的MFPH计算公式为
M(i)=-mfcc0(i)SE(i)
(5)
1.2 双门限MFPH故障起始点检测
为了区分正常信号段和故障信号段,需要获取各段信号MFPH参数数值分布规律. 双门限法基于短时平均能量和短时平均过零率,可根据正常信号及故障信号的不同参数值,选择故障段高低门限值并确定故障段的起始点. 模糊C均值聚类[14](FCM)通过不断更新隶属度函数和聚类中心来获取类内最小误差,可对MFPH的门限值进行评估,避免产生故障点漏检的情况.
针对样本集X,有聚类中心集mj,则算法目标是使J值最小
(6)
式中:C为聚类簇数;N为样本数目;μj(xi)为xi关于j类的隶属度;b为模糊常数且b>1;mj为j类聚类中心.
为提高样本描述能力,通过贝叶斯信息准则(BIC)来选择聚类簇数. 对于模型M
(7)
式中:L为X上的对数似然函数;Φ为参数集;nΦ为参数数目;γp复杂度的惩罚项.
若单一信号段的BIC值大于包含正常及故障2种信号段的BIC值时,最优聚类簇数Cbest为1,其余为2.
已知信号MFPH特征后,基于FCM与BIC的双门限自适应故障预警流程如图1.
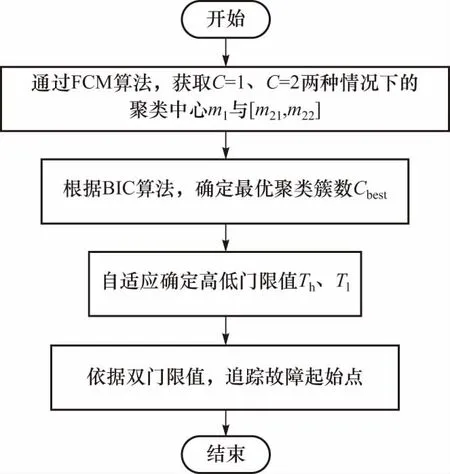
图1 故障预警方法流程Fig.1 Flow of failure warning method
2 VMD的原理与改进
2.1 VMD原理
VMD是一种利用约束优化来解决信号分解问题的信号处理方法,VMD将信号分解为一组模态分量,在分解过程中每个分量的中心频率和带宽不断迭代至最优值,最后将信号进行自适应分解. 优化模型如下
(8)
式中:K为模态分量的个数;{uk}为分解的模态分量;{ωk}为{uk} 的频率中心;f为输入信号.
对uk、ωk和λ进行交替迭代寻优,迭代公式如下
(9)
(10)
(11)
式中γ直到满足给定精度ε,迭代停止,得到最终的模态分量及相应的频率中心.
2.2 VMD改进
研究表明,VMD算法中分量个数K和惩罚参数α选取不当会产生模态混叠,且实际信号中噪声严重,K和α的值无法准确设定[15]. 因此本文提出一种能量差网格搜索法,以原信号能量和分解分量能量和之差最小为目标,搜索最优K和α,参数搜索区间基于大量测试函数和实际信号进行实验后设定,具体流程如下:
① 在[K,α]的网格中,设定K的搜索区间为[2,10],步长为1,设定α的搜索区间为[200,10 200],步长为250;
② 获取网格点对应的[K,α]值,对输入信号s(t)进行VMD分解;
③ 计算输入信号s(t)的能量值与K个分量能量和的差值,更新全局最小能量差,并按步长遍历整张网格.
在信号分解中,VMD在信号截断和外界因素的影响下会出现端点效应,严重影响了分解精度. 针对端点问题,通常采用边界延拓来抑制. 支持向量回归机(support vactor regression,SVR)以统计为基础,通过核函数解决非线性拟合问题,可依据小样本得到全局最优值,衡量和真实值的预测误差[16]. 支持向量回归机SVR模型如式(12),对于给定的样本D={(xi,yi)},可使f(x)与y尽可能接近
(12)
SVR抑制端点效应的具体步骤如下:
① 取长度为N的样本信号,用SVR对其进行左右延拓,延拓个数分别为NL和NR;
② 对延拓后长度为N+NL+NR的信号进行VMD分解;
③ 将分解后的各分量在左右两边分别舍弃NL、NR个点,保留中间N个数据为最终样本分量.
2.3 改进效果分析
利用仿真信号来验证改进VMD的有效性. 信号y(t)包含频率为50 Hz和80 Hz的2个分量,采样频率1 kHz,采样时间1 s.
(13)
通过能量差网格搜索法得到VMD的最优[K,α]的值为[2,450]. 图2为经SVR延拓的信号时域对比图,SVR通过预测与真实信号的全局最小误差,有效地对原始信号进行延拓.
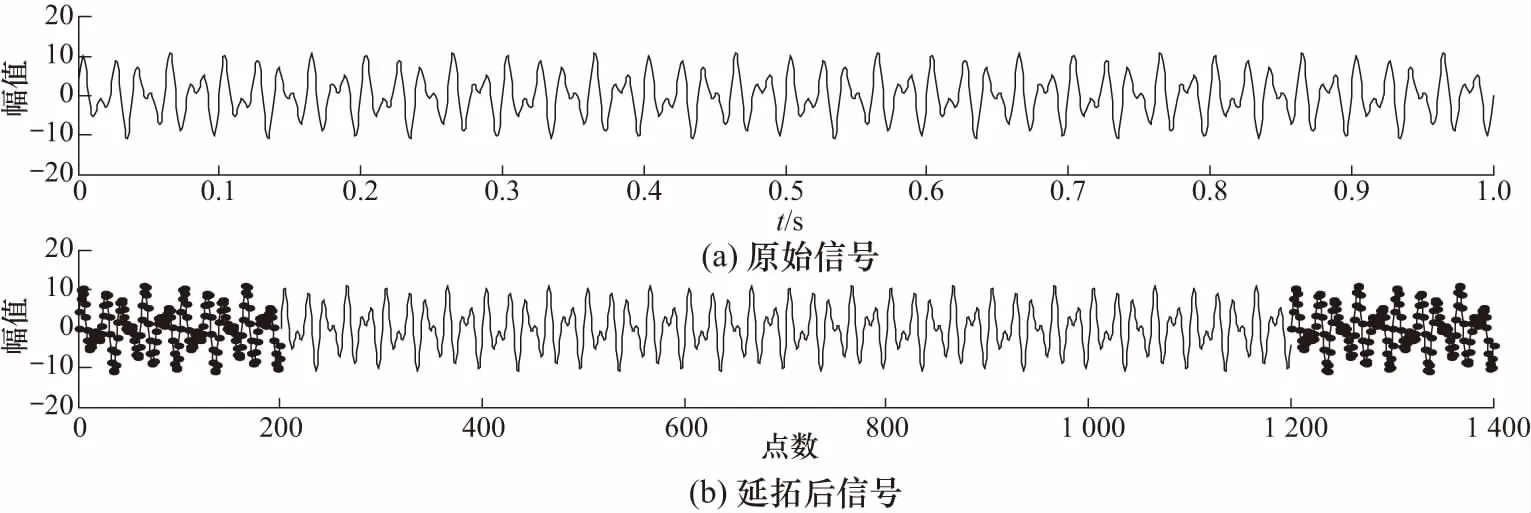
图2 原始信号和延拓后信号时域波形Fig.2 Time domain waveform of original signal and extended signal
图3为SVR延拓前后VMD分解的时频对比图,图中阴影为原始VMD分解,虽然能将频率接近的分量进行有效分离,但分量均产生“端点飞翼”现象,并且由频谱图可见信号模态混叠严重. 改进VMD分解为实线部分,能有效区分各频段的信号分量,验证了该方法在抑制端点效应及模态混叠问题上的有效性.
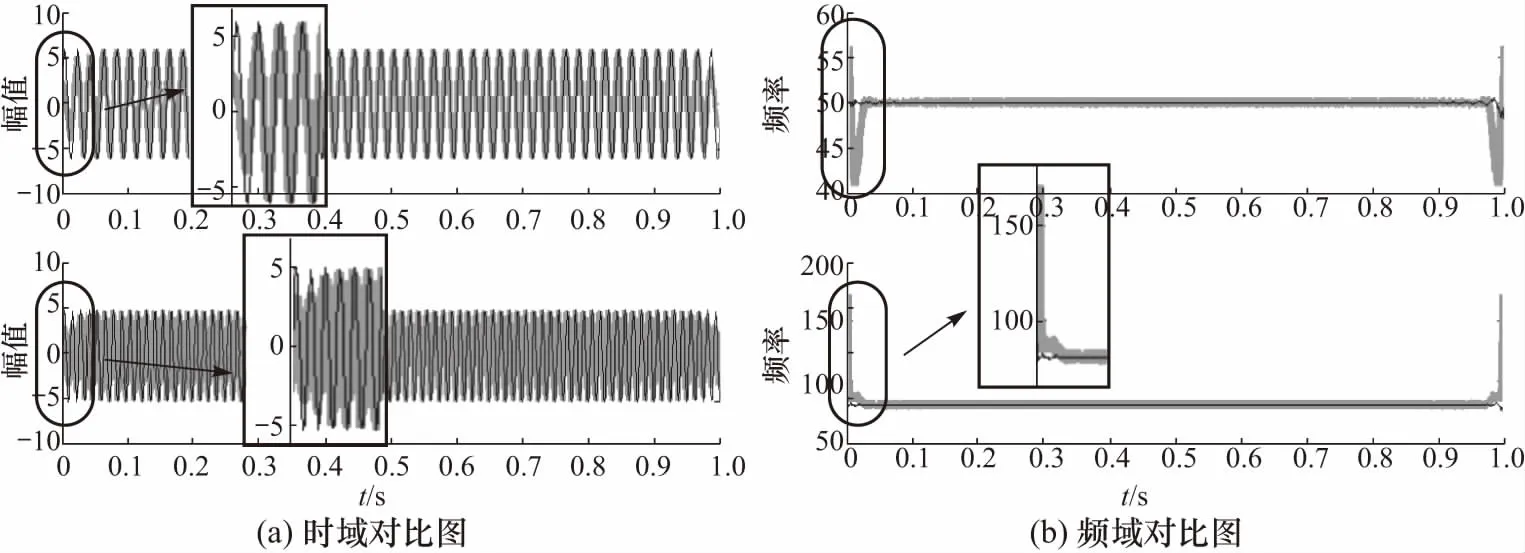
图3 延拓前后各分量时频对比图Fig.3 Time frequency comparison of components before and after extension
3 多尺度加权排列熵原理
3.1 加权排列熵
排列熵以相空间中子序列的排序方式来计算概率,时间序列越规则PE越小. 然而PE忽略了序列数值的变化,对特征提取精度产生了影响. 加权排列熵对其进行了改善,步骤如下:
① 对时间序列x(i),以时间延迟τ,取m个样本进行空间重构得到X;
② 对重构分量X(i)按升序重新排列:
x(i+(j1-1)τ)≤x(i+(j2-1)τ)≤
…≤x(i+(jm-1)τ)
(14)
③ 排序后,每行重构分量得到一组新的符号序列C′={c′(1),c′(2),…,c′(l)},其中l≤m!;
④ 计算每种排序的概率P,得出时间序列x(i)的加权排列熵归一化模型
Hp(m)=Hp(m)/ln(m!)
(15)
3.2 尺度加权排列熵
MWPE克服了WPE单一尺度的不足,充分表征了多个尺度的时间序列复杂性. 弥补了提取轴承早期故障特征细节上的不足,更能发挥VMD在轴承预警上的优势,过程如下:
① 对时间序列x(i)进行粗粒化处理
(16)
式中s为尺度因子.
② 计算不同s下,粗粒化序列z(s)的MWPE值
(17)
3.3 基于MFPH和改进VMD故障预警
本文针对传统轴承故障预警采用故障段数据分析,实时性较差的问题. 提取轴承信号MFPH参数,利用双门限法搜索故障起始点,采集起始点后的振动数据进行早期故障预警. 结合MWPE在检测动力学突变行为方面的优势,增强改进VMD提取信号特征的准确性,基于支持向量机进行预警分类验证. 提出基于MFPH故障起始点检测的改进VMD-MWPE故障预警方法,步骤如下:
① 采集轴承信号MFPH特征,依据双门限值确定故障起始点;
② 从起始点后采集故障样本,进行改进VMD分解,获取模态分量,并对分量进行粗粒化处理,得到新的序列zi;
③ 计算zi的MWPE值,并构建特征向量T=[H1H2…HK],其中K为模态分量个数;
④ 将得到的特征集输入PSO优化的SVM进行训练,获取SVM预测模型;
⑤ 将故障段数据按步骤②~⑤提取特征向量,通过SVM进行早期故障预警.
4 实验分析
为验证本文预警方法的有效性,以图4上海频询机械故障综合模拟实验台所采集的数据为样本. 结合USB-1608GX-2AO的DAQ设备、加速度计及LabView进行采样. 由于实验条件限制,无法准确从某一刻制造故障,因此将同等条件采集的正常信号与故障信号拼接作为研究对象,故障段包括滚动体故障、内圈故障、外圈故障.
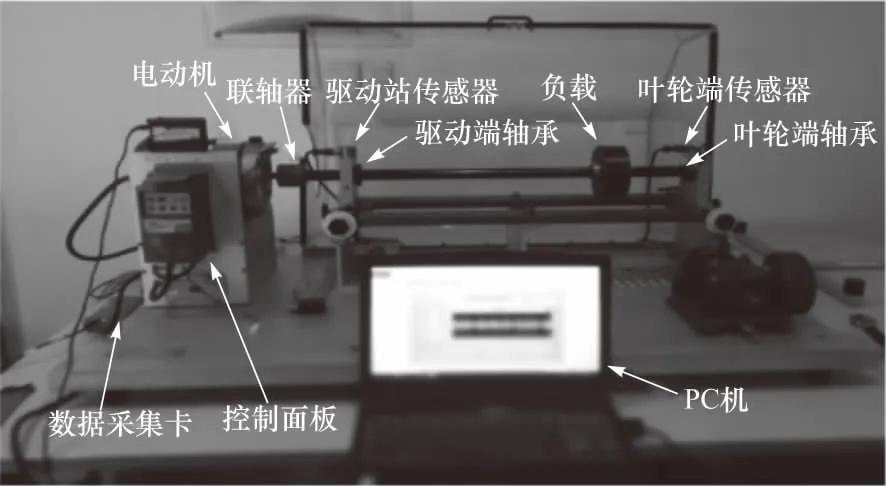
图4 轴承故障模拟实验台Fig.4 Bearing fault simulation test bed
4.1 MFPH故障点检测
在采样频率为8 kHz条件下,取4 000个正常振动信号数据分别与内圈、外圈和滚动体故障数据各4 000个进行拼接,理论上在t=0.5 s时会检测到故障起始点. 以内圈故障为例,如图5所示,正常段信号MFPH门限值在[0,2]区间,内圈故障在[-2,-3]处,有明显区分度.
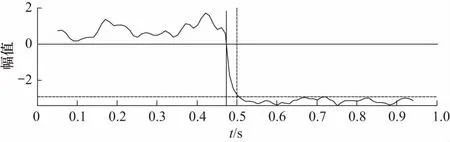
图5 内圈故障起始点检测Fig.5 Starting point detection of inner race fault
双门限MFPH提取短时能量和短时过零率等特征参数,适用于高信噪比环境下的端点检测[17]. 因轴承工作环境复杂,为了进一步验证MFPH检测效果,将待测信号加入5 dB的低信噪比白噪声. 如图6所示,虽然MFPH特征受噪声影响,但故障起始点时刻仍在t=(0.5±0.02) s范围内,证明该方法可在噪声环境下作为起始点检测依据.
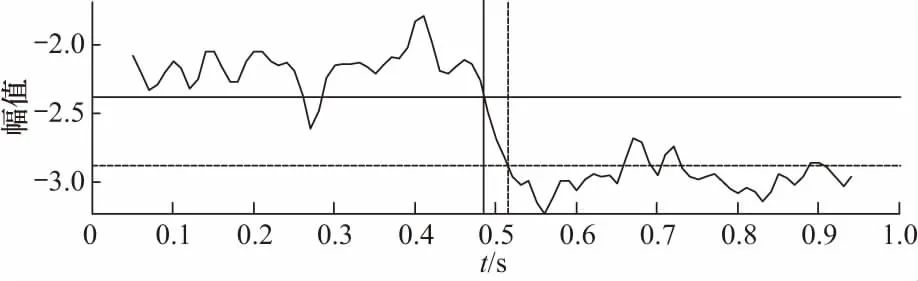
图6 白噪声环境下内圈故障起始点检测Fig.6 Starting point detection of inner race fault in white noise environment
为验证方法普遍性,重新采集样本,分别对3种故障拼接段各100组重复上述实验,统计漏检、错检情况及正确率如表1所示. 标准环境准确率为98.32%,白噪声环境下准确率仍达96.65%,表明该方法应用于轴承故障起始点检测的有效性.

表1 故障预警实验结果Tab.1 Experiment results of failure warning
4.2 VMD参数选择
本文利用能量差网格搜索法来确定VMD的参数[K,α],不同参数会对分解产生重要影响.K值过小会导致特征缺失,过大则产生模态混叠,影响分量带宽的大小. 以滚动体故障为例,取一组点数为1 200的数据,用能量差网格搜索法进行参数寻优得到最佳参数[K,α]=[4,4 200],对应的最小能量差为3.313,能量差网格图如图7所示.
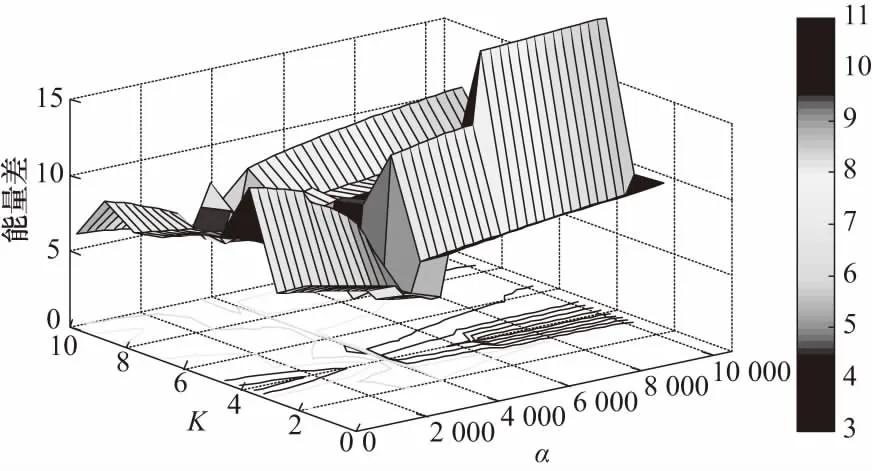
图7 0滚动体故障VMD分解最小能量差值图Fig.7 VMD decomposition minimum energy difference diagram of rolling element fault
4.3 改进VMD和MWPE的特征提取
将VMD参数设定为寻优后参数,以滚动体故障为例,采用上文选定参数[K,α]= [4,4 200],对比改进前后VMD分解效果,如图8,图9所示,VMD分解中,前2个分量频带中心不明显,频带分别集中在164~1 436,2 602~2 848 Hz之间,分量3、4有严重混叠部分,而采用改进VMD分解的分量频谱清晰,在提取特征中有明显的优势.
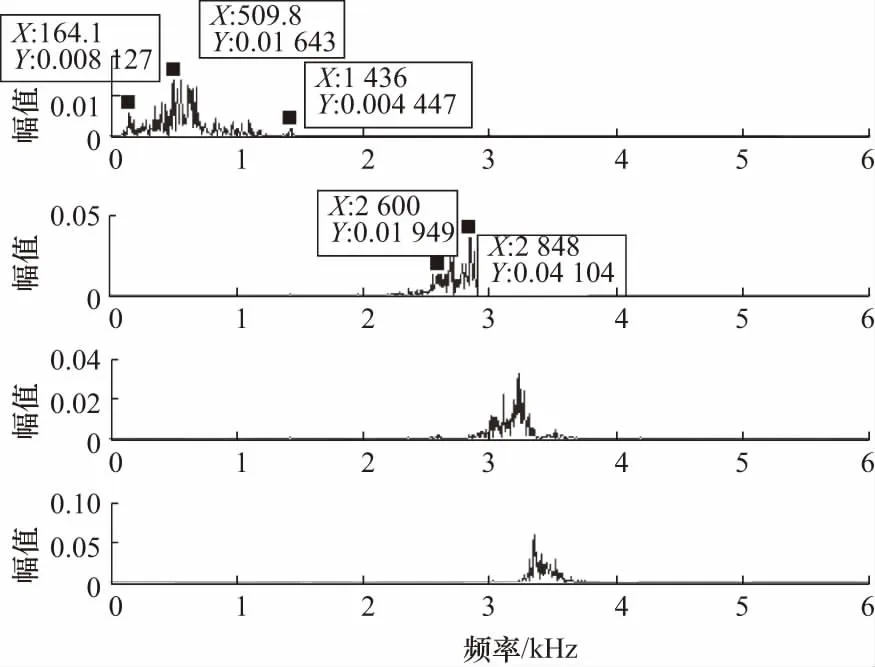
图8 VMD分解频谱图Fig.8 VMD decomposition spectrum
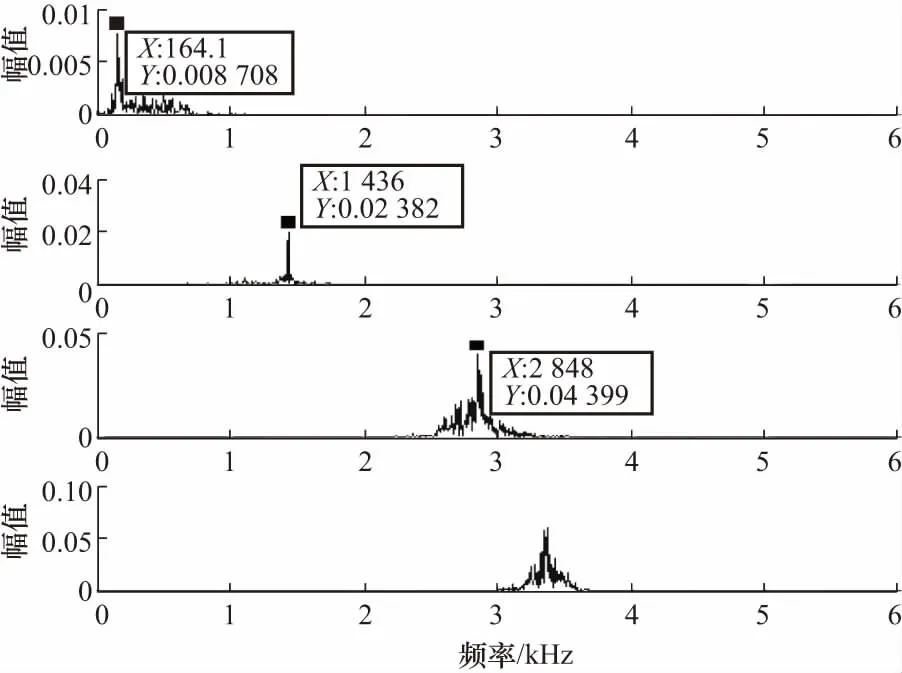
图9 改进VMD分解频谱图Fig.9 Improved VMD decomposition spectrum
为了进一步验证本文改进VMD的优势,采用SVR对EMD进行延拓,与本文方法进行对比. 图10为延拓后EMD的分解结果,得到了9个IMF分量. 对比发现EMD早期故障特征混叠严重,且虚假分量多,分解效果较差. 综上,证明了本文改进VMD方法在提取故障特征频率方面的优越性.
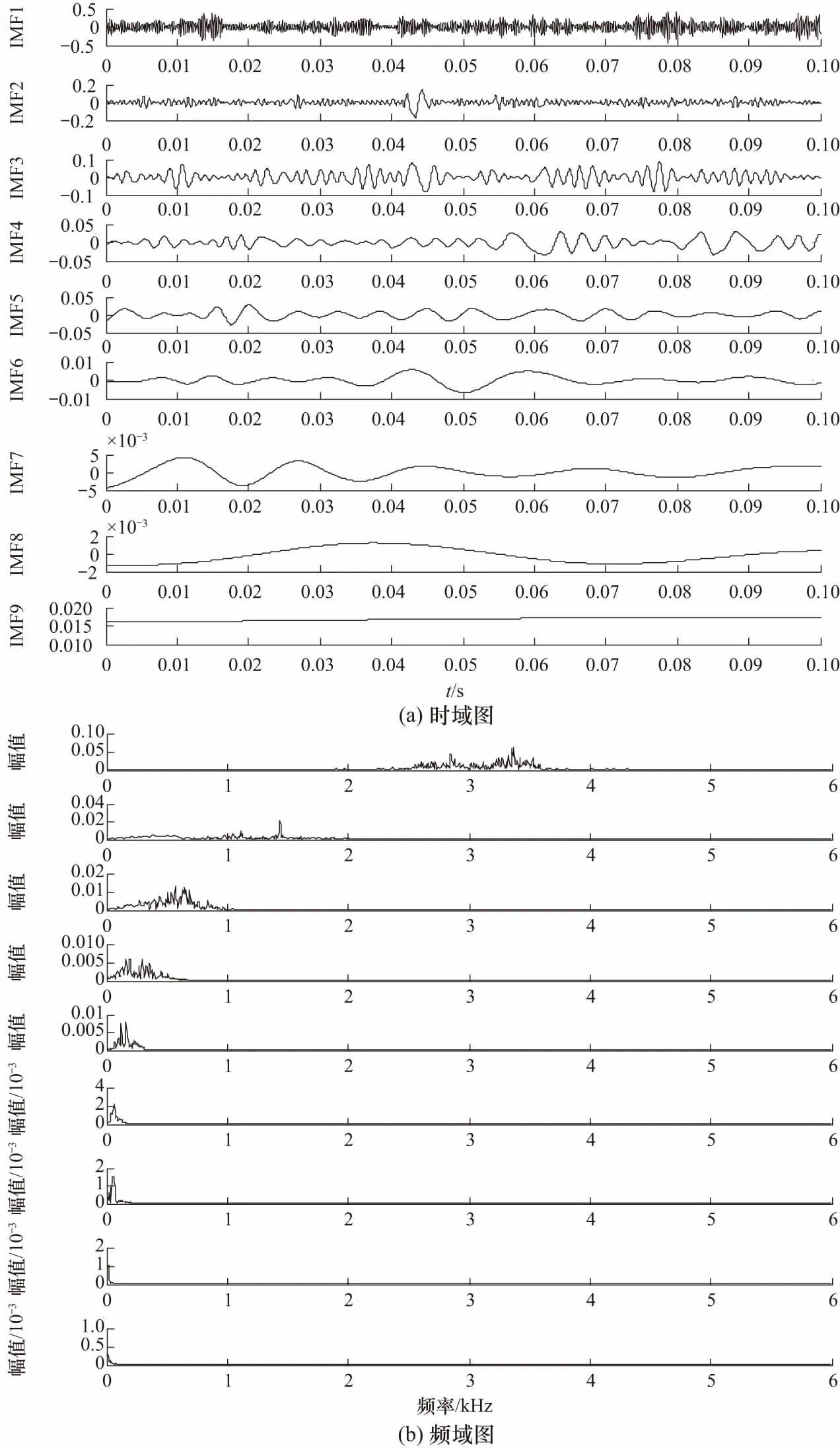
图10 SVR延拓后EMD分解时频图Fig.10 EMD decomposition time-frequency diagram after SVR extension
为进一步发挥VMD优势,更准确地提取早期故障特征以达到良好的预警效果. 对正常、内圈、外圈及滚动体故障4种状态各取10组数据,每组1 000个点,WPE和MWPE的重构分量维度m=5,时间延迟τ=2,MWPE的尺度因子s=10. 基于本文改进VMD-MWPE特征提取方法,构建特征向量. 如表2所示,MWPE特征相比WPE,方差更小,证明了MWPE的稳定性更强、类间差异性更优,进一步验证了MWPE能更精准地提取故障特征.
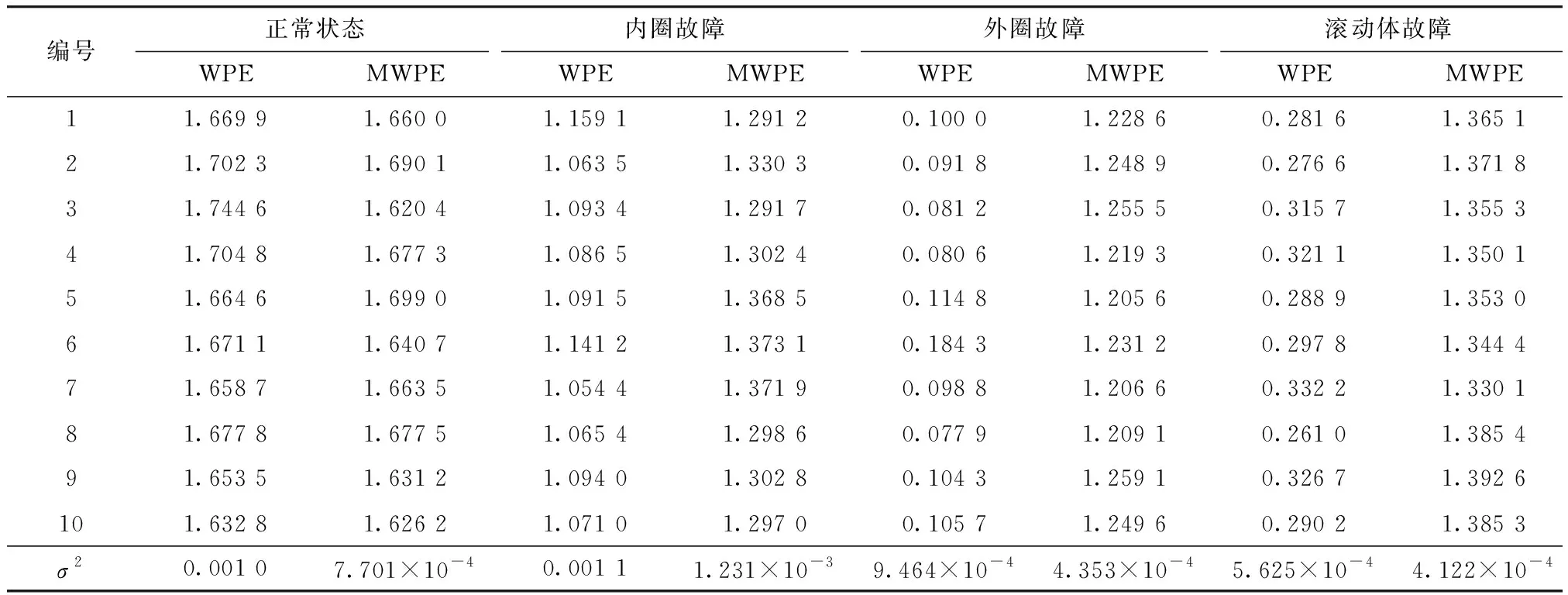
表2 4种状态下振动信号的WPE和MWPETab.2 WPE and MWPE of vibration signal in four states
4.4 故障预警效果分析
基于MFPH的双门限法确定故障起始点后,采集早期故障数据进行VMD-MWPE特征提取进行故障预警,提高了预警模型的实时性. 为进一步验证本文方法,将采集的100组数据,分别通过改进前后的VMD进行分解,并分别计算WPE和MWPE为特征向量,将特征向量输入到PSO优化的SVM,60组数据进行训练,40组进行测试,结果如表3所示.

表3 故障识别率对比表Tab.3 Comparison table of fault identification rate
表3验证了MWPE以时间序列随机性和微弱信号敏感性的优势,使VMD得以充分发挥,通过SVM测试后,对样本识别率平均高达98.75%,准确率远高于其他3种方法,验证了本文预警方法的可行性.
5 结 论
本文将语音端点检测思想加以迁移,提高了故障预警的实时性,研究了改进VMD-MWPE的特征提取方法,通过仿真信号和实际数据分析可知,本文方法在故障特征捕捉中具有一定优势.
① 将MFPH特征作为故障点判别依据,利用BIC算法确定是否包含起始点,通过FCM对信号段门限值进行自适应估计,最后依据双门限进行故障起始点检测.
② 改进VMD自适应确定分解层数K和惩罚因子α,解决了参数难以确定的问题;结合SVR良好的泛化能力对信号进行延拓,解决了VMD的端点效应问题,并有效地抑制了模态混叠现象.
③ 振动信号表现了动力学突变行为,基于MWPE对动力学突变行为检测的优势,提高故障特征的准确性.
④ 基于起始点检测的实时优势,结合改进VMD-MWPE对轴承故障特征的准确提取,保证了故障预警的可靠性.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
汽车工程师(2021年12期)2022-01-17
读者·校园版(2020年19期)2020-09-16
中国电气工程学报(2020年3期)2020-07-31
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
汽车与驾驶维修(维修版)(2019年7期)2019-09-10
成长·读写月刊(2018年8期)2018-08-30
英美文学研究论丛(2018年1期)2018-08-16
科技风(2018年23期)2018-05-14