
对于双雷达联合测速系统的研究
2021-12-12 10:09荣夫博
科技信息·学术版 2021年32期
荣夫博


摘要:在过去我们测速的时候,更多的使用是单雷达测速系统。可以说,单雷达测速系统再过去是十分普遍的。但是由于受到一些不稳定的因素,比如车辆颠簸,恶劣天气等因素影响,会使测量的结果不够精确。因此我们考虑使用双雷达测速。搭建双雷达测速系统并通过这样的方式与单雷达测速系统进行比较,从而发现双雷达联合测速系统具有更好的优越性。在测量时更加精准,同时准确性更高。本文通过对双雷达联合测速系统进行研究,为提高未来雷达测速系统的精确度提供一个良好的方案。
关键词:双雷达;联合测速;系统;研究
1.引言:
随着社会的不断发展,交通运输业不断发达。火车成为当前运输的重要交通工具,火车运输存在许多优越性,比如可以运输更多的货物,同时成本更低。由于轨道固定,稳定性更好,火车运输成为当前很多国家作为主要的交通运输工具。列车控制系统是列车行进过程中十分关键的一个环节,通过控制系统能够有效的控制列车的行进速度。从而保障列车能够安全有序的运行。而这套系统有一项十分重要的环节,那就是雷达测速系统。通过雷达测速系统能够更好地掌握当前车辆行驶的情况。列车的雷达测速系统能够更精准的掌握车辆的具体情况,当车辆出现故障时,能够更快的做出反应,保障车辆能够安全运行。因此该系统是列车的核心之一。雷达测速体系精准度十分高。能够察觉到很多细微的变化,因此在技术上存在很大的优点。当前很多列车的系统都用的是单雷达测速系统。当列车存着很多不稳定因素,比如颠簸运行障碍的时候,往往会存在测量不精准的情况,因此会造成很大的误差。在测量起来会存在很大的不足。正因如此,我们考虑通过使用双雷达联合存储系统来进行测量。以此来提高测量的精准度和稳定性。在实际工作中,通过双雷达联合操作系统进行测量,确实存在很大的优越性。这个系统能够更好的测量数据,并如实反馈,能够更好的抗干扰。通过使用联合测速系统,能够提升系统对环境的适应性,从而更好的监测列车的相关数据。
2.双雷达联合测速原理
2.1雷达测速基本原理
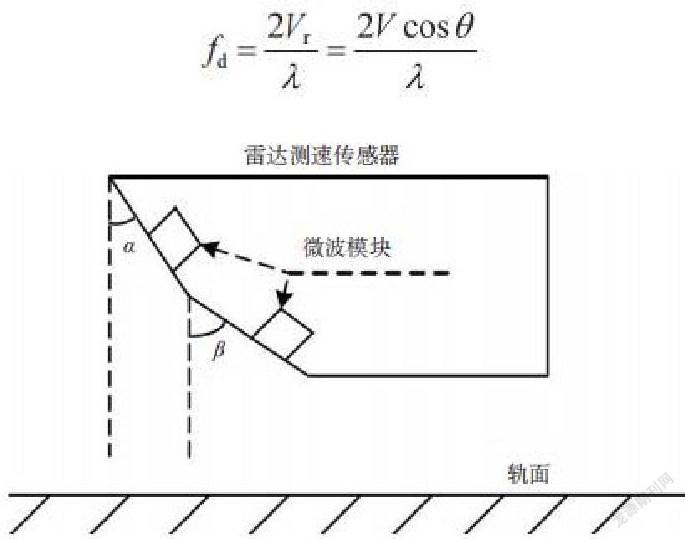
当我们开始进一步探讨雷达测速基本原理的时候,应当首先考虑到多普勒效应,因为多普勒效应,对于我们研究雷达测速有着十分关键的作用。通过雷达测速,我们可以更高效的测量列车行进的时速。将测速仪安装在列车内通过电磁波的反射来测量出真实数据。由于该系统的发射波与反射波存在一定的差距,而这样的差距也进一步的可以帮助我们获取相应的数据,以此来测量列车行进的速度。列车在运行的时候,两个波频率是存在很大差异的。当列车运行速度越快的时候,两者之间的差距就越来越大,通过测量可以得出列车实际的行进速度,同时通过多普勒效应以及相对应的公式,可以测出并且计算出真实的数据。
当车辆颠簸的时候,往往会让测量结果存在很大的误差,进而导致测量结果不准。那么针对以上问题,可以通过双雷达联合输出系统予以解决。双雷达测距系统传感器内可以配置两个相关软件。然后对两个模块所采集的不同信号来进行数据的分析。从而进一步的减少之前数据的误差。更好的测出正确的数据。
2.2 双雷达联合测速
由于汽车颠簸的时候,单雷达测速系统无法更加精准的测出车辆行进的速度。因此,我们采用双雷达测速系统进行测量,以减少误差的产生。通过雷达高度差进行测量。用两部雷达进行测速,根据雷达垂直高度的差距,可以得出车辆的行进速度。进一步的减少误差。更好的弥补车辆因为颠簸在恶劣天气下行进时,所产生的数据差。
我们可以通过以下方法来测量车辆实际行进的速度,通过双雷达系统更加精准的获取。假设两个雷达的垂直高度是H1 以及H2,雷达 1 测 得的斜距为 R1,通过进一步测量,多普勒频移量为 fd1;雷达 2 测得的斜距是 R2,与之前算法相同,测得的多普勒频移量为fd2。
通过以上公式,进一步求出相关数据。通过对双雷达联合测速的提供数据与单雷达所测速提供的数据进行比对。发现双雷达联合测速更具优势。
3.双雷达联合测速系统构成及优点
双雷达联合测速系统与单雷达联合测速系统最大的不同是通过两个雷达进行收发信息。通过两个雷达进行数据的调控,可以更精准的测量相关数据。两个雷达在工作的时候,在接收信息指令时,能够同时开工。更精准的测量出信号波形。通过两个雷达所接收到的信号,进一步提高整个系统的稳定性和数据的可靠性。与此同时,可以让芯片的体积更小。当芯片体积小的时候,就可以进一步提高雷达测速的稳定性。从而实现更高性能的系统优化。综上所述,双雷达测距系统具有比单雷达测速系统更精准的优越性。
双雷达测速系统的天线采用的是阵列天线。这样的天线具有很多优点,可以占据更小的空间,进一步减小数据的误差。并且由于其设计的特性,让这样的设备能够更好的满足在恶劣环境中使用。由于其质量比较轻,也可以进一步减小数据误差。通过接口对设备进行控制,更好的采集相关数据以及完善系统的优化。在一定条件下,双雷达操作系统能够更好地满足车辆在高速行驶以及颠簸的情况下,对速度的采集。并且经过公式的计算。来获取更加准确的信息,满足未来在车辆行驶时,发生故障所需要的数据分析。因此,在未来,应当更加重视对双雷达联合测速系统的研究,这将是未来测速系统发展的趋势。
4系统测速精度分析
4.1多普勒频移量估计误差
通过双雷达测速系统和单雷达测速系统所采集信息进行比对。进一步获取两个不同的系统在测速时所产生的误差。从而更精准的分析数据,探讨存在差异的原因。
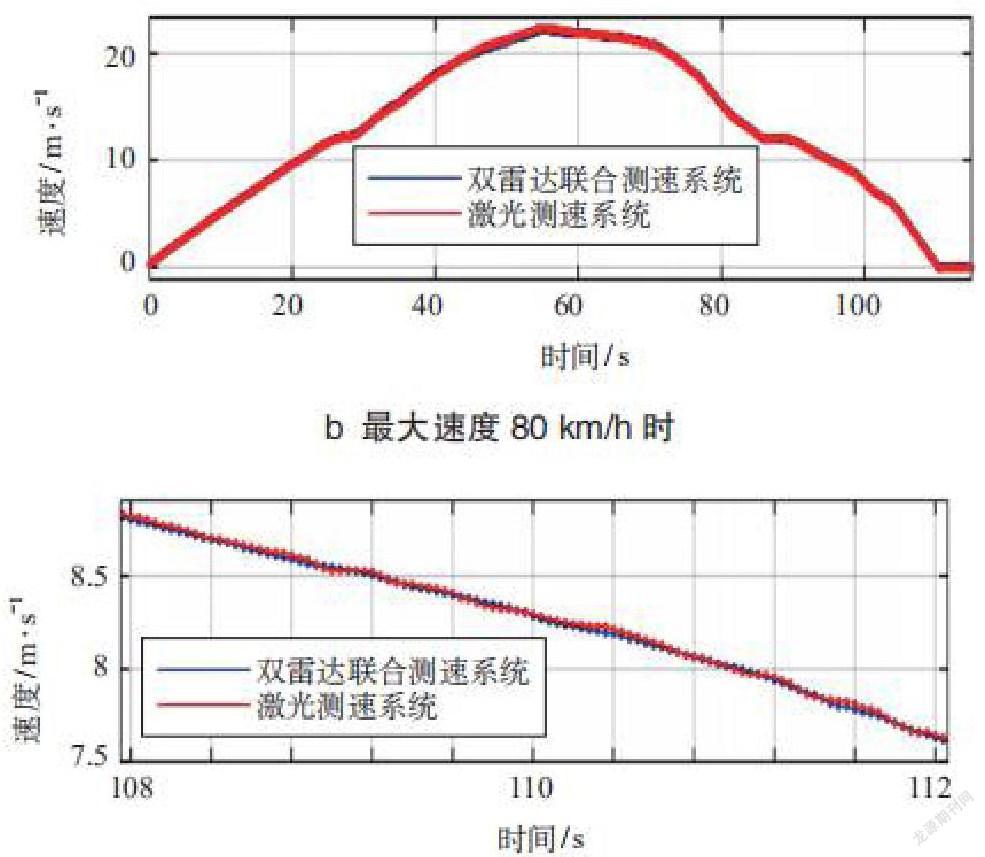
通過图片以及公式,我们可以发现。多普勒频率的数据存在误差。是由于公式计算造成的。图片所展现的是双雷达联合测速系统测算结果。通过数据的不断比对以及对误差的考量。进一步分析存在误差的原因。当该数据误差相同时,安装位置不同的雷达系统所产生的误差也不同。安装位置比较高的雷达系统误差会更加小。而在双雷达联合测速系统中,测速的误差往往会与单雷达测速系统不同。因为双雷达测速系统通过两个雷达进行测速。让雷达之间的倾斜角更小。稳定性更大,而波动更加平缓,从图片可以看出,曲线是十分平缓的。这也是造成双雷达测速系统与单雷达测速系统产生结果不同的原因。通过图片展示,我们不难发现,当雷达测速系统在车辆速度不断加快的时候,往往会存在误差越来越大的趋势,而双雷达测速系统在列车高速运行时,误差发展更加平缓,只有当速度更快的时候,才会产生更大的误差。这也进一步证明了,双雷达测速系统比单雷达测速系统更加精准,数据更加稳定。
4.2 雷达垂直高度偏差
单部雷达测速首先需要精准地测量雷达垂直高度。然而,实际上雷达天线的相位中心通常并不是天线的几何中心,且列车在运行时会不可避免地产生颠簸振动,致使雷达垂直高度 H 随之变化,从而导致极大的测量误差。由于双雷达联合操作系统与单里达联合测速系统不同双雷达联合测速系统,垂直高度差更小。因此,不需要进一步测量单部雷达的垂直高度。进一步的减少测量的误差。当然,单雷达测速系统只有一个雷达进行测速,往往会因为垂直高度差距比较大而引起数据差异。造成数据的不准确。因此双雷达测速系统通过数据比对能够更加精准地反映出列车真实的行进速度。
总结:
通过对双雷达测速系统与单雷达测速系统进行数据分析以及实际情况的模拟,我们不难看出,双雷达测速系统在测量列车行进速度的时候,能够比单雷达测速系统测速时更加稳定,数据更加精准。在未来,双雷达测速系统必然是未来测速系统发展的趋势,也是研究关注的焦点。也正因如此,我们在设计双雷达联合操作系统时,可以通过高性能的集成电路来实现系统的不断优化。从而为未来雷达测试系统的高精度发展提供新的可能和更好的解决方案。
参考文献:
[1]唐伟,孙志芳,陈全 . 基于 DSP 的车载雷达测速系统 设计 [J]. 自动化技术与应用,2006(7):20-21,32.
[2]孟凡江,尹逊政 . 一种基于多传感器融合的冗余测 速测距系统设计 [J]. 铁路计算机应用,2018,27 (1):46-50.
[3]张洋,周达天,刘宏杰,等 . 基于多传感器融合的列车测速定位方法 [J]. 都市快轨交通,2011,24(4):30-32.
[4]梅嘉伦,王啸,包演生 . 现代功率谱估计在雷达测速中的试验验证 [J]. 机车电传动,2016(2):75- 76,88.
[5]李萌,曹林,王东峰 . 用于机车测速的雷达传感器 算法研究 [J]. 传感器与微系统,2016,35(12):69-71.
猜你喜欢
科学家(2022年3期)2022-04-11
小学阅读指南·低年级版(2020年11期)2020-11-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
证券市场红周刊(2018年17期)2018-05-14
军事文摘·科学少年(2017年4期)2017-06-20
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
地震研究(2017年1期)2017-04-10
地震研究(2017年1期)2017-04-10
