
直联式刚性联轴器产生同步误差的原因分析及解决方法
2021-12-12 10:09黄自祥
科技信息·学术版 2021年32期


摘要:对直联式刚性联轴器产生同步误差的原因进行了分析,推导出了同步误差公式,给出了数值解,并提出了消除同步误差的方法。
关键词:方位同步轮系;自整角机;刚性联轴器;同轴度误差
引言
在雷达系统工作时,伺服控制系统通过自整角机实时获取天线波束扫描的方位信息。有些雷达方位自整角机与方位同步轮系采用刚性联轴器进行联结,结果在使用中发现存在同步误差。本文从数学角度对同步误差产生的原因进行分析,推导其同步误差公式,给出数字解,并提出解决方法。
1同步误差产生原因分析
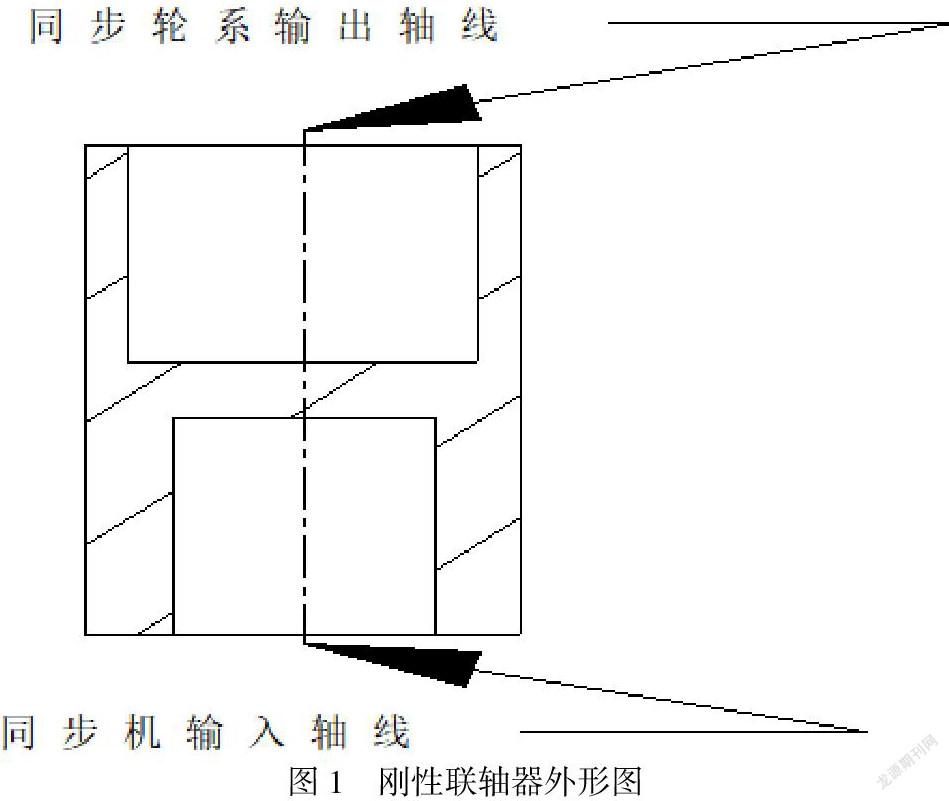
在雷达传动系统中,方位同步轮系通过速比变换,将雷达天线方位按1:1进行输出,方位自整角机用联轴器联结到方位同步轮系的输出轴上,从而实时反映天线方位信息。刚性联轴器外形见图1。
由于刚性联轴器上下轴孔加工时,不可能完全同心,存在加工误差,因此当用刚性联轴器将自整角机连接到同步轮系的输出轴时,会带来同步误差。
这里我们假设刚性联轴器上端轴孔与联轴器外圆同轴,不存在加工误差,而其下端轴孔与联轴器外圆不同轴,存在偏差。即自整角机输入轴孔与同步轮系输出轴孔存在偏差,其同轴度误差为b,见图2。
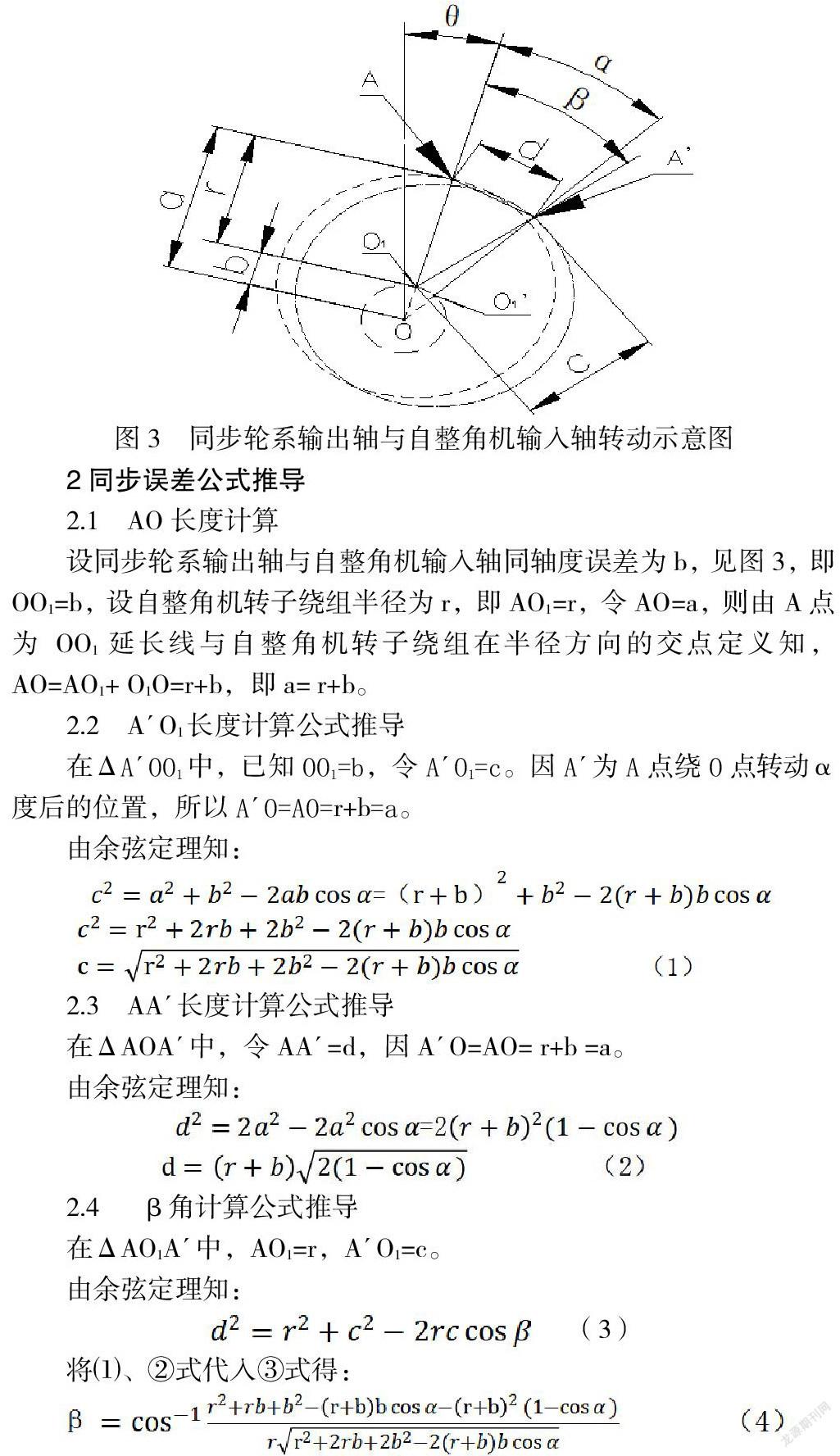
当雷达天线转动时,方位传动系统方位大齿轮带动同步轮系转动。同步轮系的输出轴带动自整角机转动,从而实时输出雷达天线方位信号。若自整角机输入轴与同步轮系输出轴存在同轴度误差b,当同步轮系输出轴绕刚性联轴器轴线中心点O转动α度时(见图3),因自整角机与联轴器为刚性联结,其输入轴中心点O1(O1亦为自整角机定子绕组的中心)也会绕O点转动α度,且由O1点旋转到了O1´点。此时自整角机输入轴上的A点(A点为OO1延长线与自整角机转子绕组在半径方向的交点)也旋转α度到了A´点。但此时自整角机转子绕组相对自整角机定子绕组中心O1点只旋转了β度,见图3。自整角机输出的度数反映的是转子绕组绕定子绕组中心旋转的度数β。由图3可见,α角和β角显然不同,这就带来了同步误差。图中θ为AO连线与方位正北的夹角。以上所述O1点绕O点转动及后续公式推导,只有在自整角机轴承的径向游隙大于OO1的距离时,方才成立。当自整角机轴承的径向游隙小于OO1的距离时,需同步轮系输出轴发生径向位移,情况非常复杂,本文不予论述。
3 不同同轴度误差对同步精度误差影响的数值解
联结同步轮系和自整角机的刚性联轴器,其外径一般不会超过12 mm,联结同步轮系一端孔的内径一般不会超过6 mm;联结自整角机的另一端孔的内径一般不会超过3 mm,高度不会超过40 mm。因此联轴器加工时,即使需掉头加工2个光孔,但2个光孔的同轴度误差一般不会超过0.05 mm。
下面通过式④、⑤分别给出自整角机转子绕组半径为12 mm,联轴器两个光孔同轴度误差分别为0.03 mm、0.04 mm及0.05 mm时的同步误差图。
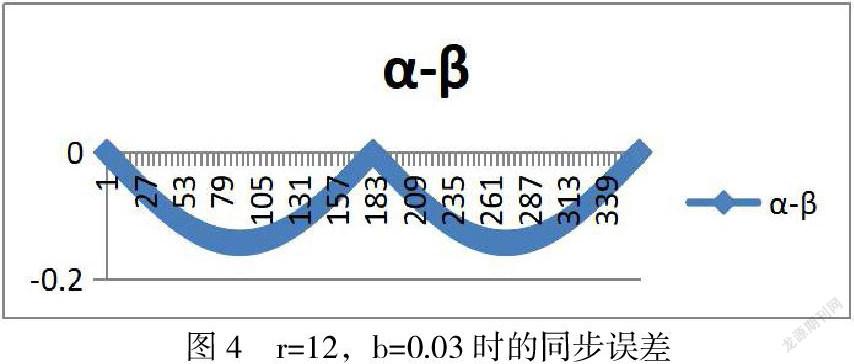
从图4可看出当r=12,b=0.03时,方位最大绝对误差值为-0.143°,出现在天线顺时针旋转90°的位置;从图4还可以看出,天线真实方位始终小于自整角机给出的方位,α-β同步误差值始终为负,且呈180°负半正弦波周期重复。如若将天线正北方位精度校为0度,则α-β曲线以360-θ时的α-β值的绝对值,沿垂直轴方向整体向上平移,曲线形状不变,同步误差绝对值减小,方位误差会出现超前和滞后现象。
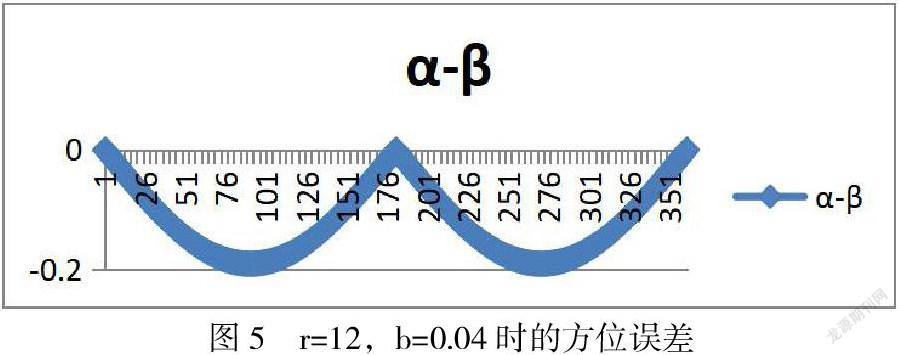
从图5可看出当r=12,b=0.04时,方位最大绝对误差值为-0.19°,出现在天线顺时针旋转90°的位置;从图5还可以看出天线真实方位始终小于自整角机给出的方位,α-β同步误差值始终为负,且呈180°负半正弦波周期重复。如若将天线正北方位精度校为0度,则α-β曲线以360-θ时的α-β值的绝对值,沿垂直轴方向整体向上平移,曲线形状不变,同步误差绝对值减小,方位误差会出现超前和滞后现象。
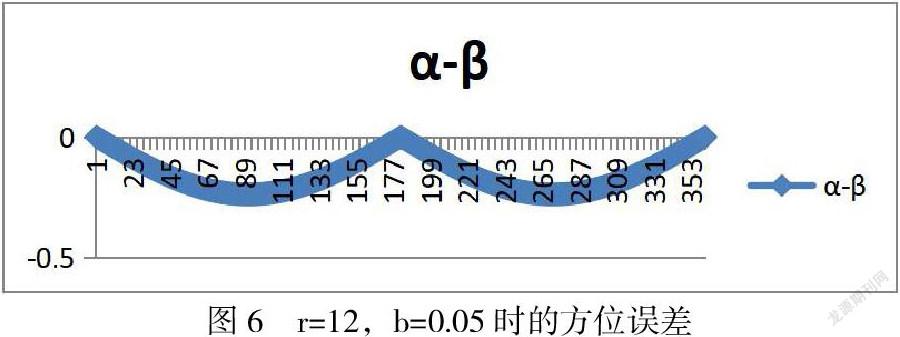
从图6可看出当r=12,b=0.05时,方位最大绝对误差值为-0.238°,出现在天线顺时针旋转90°的位置;从图6还可以看出天线真实方位始终小于自整角机给出的方位,α-β同步误差值始终为负,且呈180°负半正弦波周期重复。如若将天线正北方位精度校为0度,则α-β曲线以360-θ时的α-β值的绝对值,沿垂直轴方向整体向上平移,曲线形状不变,同步误差绝对值减小,方位误差会出现超前和滞后现象。
从图4、图5、图6可以看出同步误差绝对值随同轴度误差增加而增加,当同轴度误差数值较小时,同步误差绝对值与同轴度误差基本呈线性比例关系。
4 同步误差消除方法
刚性联轴器具有加工简单、联结方便的优点,但通过上述公式推导和数值解可见,用刚性联轴器联结自整角机,不可避免会带来同步误差,不适合于高精度雷达系统。
对于方位精度要求不高的雷达系统,可采用刚性联轴器,但应尽量减小同轴度误差。对高精度雷达系统,若采用了刚性联轴器,则可用数值方法进行修正,以消除同步误差。
对高精度雷达系统建议采用十字滑块联轴器或高精度弹性联轴器联结同步轮系和自整角机,以免带来同步误差。
5 结束语
本文以公式及数值解的形式,证明了用刚性联轴器联结同步轮系和自整角机,不可避免地会带来同步误差。因此在同步精度要求高的雷达系统中应尽量避免使用刚性联轴器联结同步轮系和自整角机,以保证系统方位同步精度。若采用了刚性联轴器,则可用数值方法予以修正。
参考文献
[1]孙萍,孙麟治.十字滑块联轴器精度分析[J].上海大學学报,1995(3):302-307.
[2]朱孝录.机械传动设计手册.电子工业出版社,2007年10月
作者简介:黄自祥 男,1975年出生,高级工程师,长期从事雷达总体结构设计及科研生产管理工作。
