
基于近红外图像的岩土湿度快速检测系统
2021-12-14 02:47钱昱沛陈向东陈一健夏文鹤
物联网技术 2021年12期
钱昱沛,陈向东,丁 星,李 皋,陈一健,夏文鹤
(1.西南交通大学 信息科学与技术学院,四川 成都 611756;2.西南石油大学 油气藏地质及开发工程国家重点实验室,四川 成都 610500;3.西南石油大学 石油与天然气工程学院,四川 成都 610500;4.西南石油大学 电气信息学院,四川 成都 610500)
0 引 言
气体钻井技术是油气资源勘探开发的一种重要技术手段,在提高机械钻井效率等方面具有独特的优势;但是在气体钻井过程中遇到地层出水后,井下容易发生环空堵塞、钻头卡钻、井壁坍塌等复杂事故[1]。因此,在钻井过程中需要快速检测掘进过程中返出岩屑的湿度水平来预警地层出水状况。目前,岩土湿度的测量方式以烘干法最为准确,但是无法达到快速检测的目的;而常用的快速检测方法中,最常见的为探针法,但无法实现大面积检测。文献[2-3]研究了通过近红外光谱来分析土壤湿度的方法,能够达到较高的检测精度,但并未涉及有干扰物影响的复杂环境检测。文献[4]采用基于图像处理的方法来检测岩土湿度,通过图像处理算法有效解决干扰物的影响,但其检测灵敏度不高,而且受环境可见光影响较大,无法适应野外钻井的应用场景。
针对上述问题,本文设计了一种基于近红外图像的岩土湿度快速检测系统。
1 系统总体方案
岩土湿度快速检测的总体方案为:利用树莓派控制USB摄像头采集850 nm波段近红外岩土图像数据,并通过WiFi实时发送至上位机。在上位机中,首先将图像从RGB颜色空间变换到Lab颜色空间;然后通过混合高斯模型的建立分割出岩土区域,将分割后的只包含岩土区域的图像转换为灰度空间,采用一种基于小波变换的算法降低散斑噪声干扰,通过DBSCAN聚类算法找到只包含岩土类的像素点并计算其灰度中心值,并将其作为分段回归模型的输入,输出岩土的预测湿度值。图1为所述系统框架。
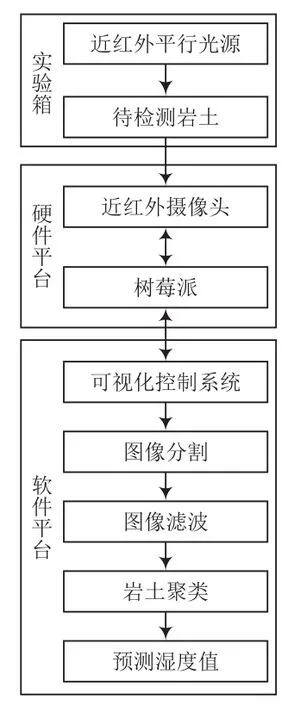
图1 系统框架
2 基于树莓派的图像采集和传输
本系统主要利用便携式嵌入式设备树莓派控制摄像头采集图像,并将采集的图像发送至上位机。采用基于TCP传输协议的Socket技术实现树莓派与上位机之间的通信[5]。树莓派作为硬件控制端,首先初始化Socket模块,绑定一个IP端口并监听,等待上位机的连接请求。上位机为PC机,同样初始化Socket模块,通过connect()函数给硬件控制端发送连接请求来建立起与远程硬件之间的通信桥梁。如果连接成功,上位机可以控制树莓派实时拍摄图像并接收树莓派连续发送的图像数据流,实现系统的快速检测功能。上位机和下位机通信流程如图2所示。
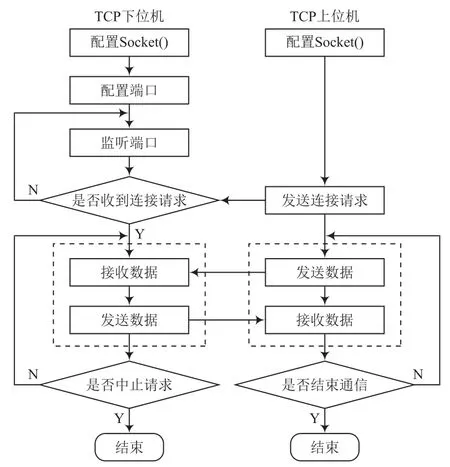
图2 上位机和下位机通信
3 近红外图像处理算法
3.1 基于Lab颜色空间的图像分割
3.1.1 Lab颜色空间模型的转换
岩土图像容易受背景复杂性、光照多变性等环境因素干扰,在Lab颜色空间下建立混合高斯模型可以根据岩土的亮度特征和颜色特征来区分岩土中的干扰物。Lab颜色空间是一种基于人的视觉感应并使其均匀化的颜色系统,其中包含L、a、b三个特征值,L值表示亮度特征,a和b表示颜色的对立维度特征[6]。CMOS近红外摄像头采集到的近红外图像为RGB颜色空间下的图像,首先需要映射到XYZ颜色空间[7],其关系为:
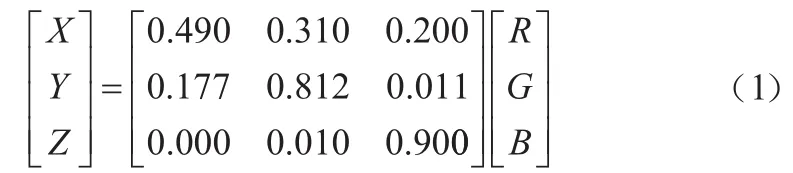
然后通过XYZ颜色空间进一步转换为Lab颜色空间,转换公式为:
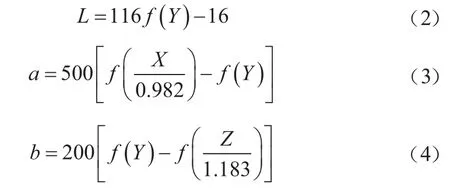
其中:
式中,m=0.008 856。
经过转换后,Lab颜色空间下的近红外岩土图像可以表示为X={x1,x2,...,xi,...,xN},其中xi=(xL,xa,xb)表示该图像的每个像素点,是一个3维向量,xL、xa、xb分别表示该像素点的L、a、b值。
3.1.2 混合高斯模型的建立
混合高斯模型是根据事物的正态分布特性采用多个高斯模型的加权和来表征数据的一个混合模型[8]。在岩土的近红外图像中其像素点存在聚集性分布,因此可以利用混合高斯模型对其进行建模,从而分割出检测区域中较大干扰物,降低复杂环境下误检测的概率。近红外图像的概率密度为:

3.1.3 基于EM算法的参数学习
EM(Expectation-Maximization)算法是混合高斯模型的常用参数学习算法[9],通过对参数θ设定初值使其变为已知模型,根据该模型进行E步的计算得到每个像素点的概率密度;然后再通过整幅图像的概率分布进行M步计算,采用极大似然估计法求取高斯模型的参数θ,更新E步的假设参数并重复上述过程,使其达到最终的最优化收敛。
首先假定图像中的高斯分布模型是已知的,给定初值θ0。通过如下公式进行E步计算:

其中,ωik表示图像中像素点xi在第k个高斯分布下的概率,且1≤k≤K,1≤m≤K,1≤i≤N。
通过E步计算出概率后进行M步计算,并更新该模型的参数,具体表达式如下:

重复以上E步和M步,直至参数达到最优的收敛。
3.1.4 通过先验知识确定岩土的高斯分布
通过混合高斯模型可以将采集到的图像分为K个高斯分布,这个过程属于无监督学习,不需要先验知识。这K个高斯分布模型中就包括了本文需要的岩土区域的高斯模型。问题的关键在于并不能事先知道哪个高斯模型是该岩土的高斯模型,需要通过多次实验来确定。
本文经过多次实验后确定近红外图像中所含K个高斯模型,均值为μk=(Lk,ak,bk),其中,Lk为第k个高斯分布图像像素区域的亮度值,ak、bk为其颜色值,将其作为该岩土区域高斯分布的先验知识。
图3(a)是含干扰物原始近红外图像,对其分别采用基于RGB颜色空间和基于Lab颜色空间的混合高斯模型进行图像分割处理,得到分割后的图像分别见图3(b)、图3(c)。从图3的对比效果可以看出,基于Lab颜色空间的混合高斯模型可以有效将岩土像素点从图像的背景以及干扰中分割出来;同时相较于RGB颜色空间的建模能够较好地分割出岩土区域中的阴影部分,提高检测精度。
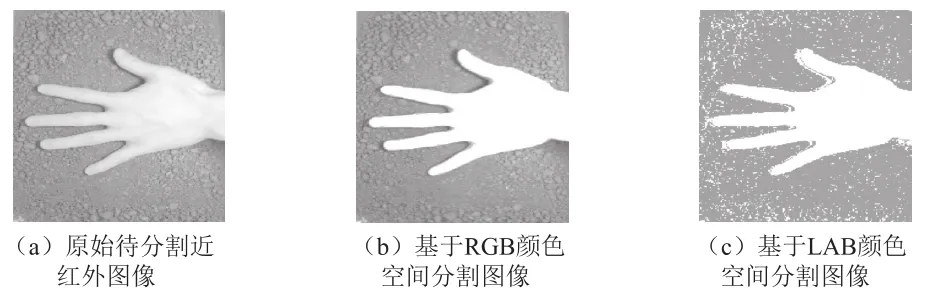
图3 图像分割效果对比
3.2 岩土灰度图像去噪
3.2.1 图像颜色空间转换
单色灰度空间直观地反映了岩土的亮度特征,能够较好地分析不同湿度下的岩土对于光照的吸收反射程度。经过图像分割后的灰度图像可表示为f(x,y),其中f(x,y)可由2个分量来表征,分别是入射分量和反射分量[10],如公式(11)所示:

式中:i(x,y)的性质取决于近红外光源的光照强度;r(x,y)的性质取决于待测岩土混合物成分,主要影响变量为湿度。因湿度不同的岩土对近红外光的吸收不同,因此反射分量的变化会引起数字图像函数值的变化。
在数字图像处理过程中,对摄像头传感器接收的电压波形进行了取样和量化[11],单色图像在任意坐标(x0,y0)处的强度(灰度)表示为:

l的取值范围为lmin≤l≤lmax,其中区间[lmin,lmax]为灰度级,范围为[0,255]。
3.2.2 基于小波变换的图像去噪
近红外图像中通常存在散斑噪声,其中既包含加性噪声的成分,也包含乘性噪声的成分,表达式为:

其中:f(x,y)为原始图像信号;nm为乘性噪声信号;na为加性噪声信号;(x,y)为含噪信号。因此,本文采用一种基于小波变换的近红外图像去噪方法来解决噪声[12]。
信号中的加性噪声采用阈值去噪的方法滤除,滤除之后信号表达式(13)变为:
通过对公式两边取对数可将乘性噪声变为加性噪声,公式如下:

对log4(x,y)进行离散小波变换,然后通过硬阈值规则,消除加性噪声log4nm。
首先选择近似于岩土频率信号的小波基函数,对该信号进行等间隔抽样,经过抽样后得到信号样本序列为CJ+1[k],然后对该序列进行N级离散小波变换。目的是为了得到图像中每个像素点的频率特征,并将该像素点的噪声信号分离出来[13]。通过以上过程得到了N级不同尺度的离散小波展开系数dJ[k],dJ-1[k],...,dJ-N+1[k]以及一级近似展开系数CJ-N+1[k]。
对于小波变换的各级展开系数,首先给定每级系数的阈值界限,将低于该阈值界限的系数设置为零,高于该阈值的系数保持不变,公式为:

3.3 岩土区域密度聚类
岩土是复杂的混合物,虽然混合高斯模型算法能够从近红外图像中分割出较大干扰物,但复杂环境下的岩土包含的一些较小的干扰物也会影响检测的准确性,如石块以及沟壑阴影。除此之外,图像检测属于大面积的区域性检测,而岩土区域中还存在着水分分布不均的情况。
针对以上问题,本文采用了密度聚类算法中的DBSCAN算法来实现聚类。该算法是一种基于密度的聚类算法,通过将高密度区域内具有相同特征的点划分为同一类实现聚类[14]。可以根据区域的不同性质和形状聚类出具有同一特征的类别,并且可以很好地识别出噪声点、排除干扰。
DBSCAN算法需要2个参数:以每个核心点为中心构成邻域的半径ε、构成一个聚类簇的区域内至少包含的关联点个数minPts[15]。通过设置以上参数进行多次迭代直至最终收敛,该算法能够找到岩土类别在灰度图像中的簇。本文通过大量实验发现,当取ε=4、minPts=(w×h)/5时可以得到最优化的聚类效果,其中w为近红外岩土图像区域的横向像素点个数,h为图像区域的纵向像素点个数。使用DBSCAN算法能够分割出类似于岩土的岩石块以及岩土图像中沟壑造成的阴影,找出岩土的像素点。前后的对比如图4所示,噪声点统一用白色点代替。聚类后的岩土区域可能存在水分分布不均的情况,因此需要计算该区域的灰度中心点并将其作为该区域湿度代表。
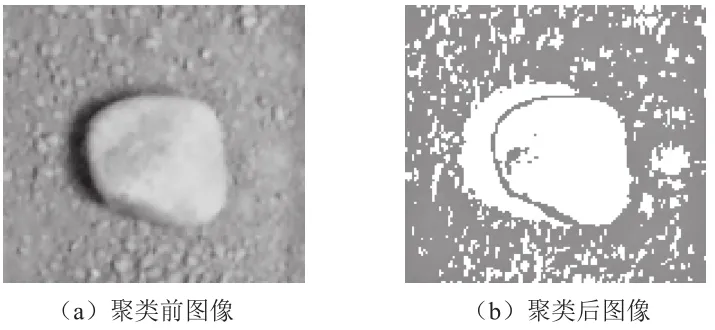
图4 岩土聚类前后效果对比
4 实验部分
4.1 模拟实验环境搭建
本系统主要采集了不同产地下不同类型的三种岩土做对比实验,样本分别为碳酸盐岩屑、天然农田土和绿化带黏土。对3种岩土分别随机采集30组不同湿度的样本,将每组样本随机抽样分为训练集和测试集。
测量岩土的实际湿度值采用的是传统的烘干称重法,可以准确地测得岩土样本的实际湿度值。其中所用到的烘干称重仪器有:质量精度为0.1 g的天平、盛土所用的不锈钢容器、50 mL的量杯、ZK-82B型电热真空干燥箱。
采集近红外图像数据用的是800万像素的索尼IMX317系列的415 USB摄像头模组,镜头上贴了850 nm的窄带滤光片防止摄像头采集到其他波段的信息,近红外主动光源选用850 nm的40 W广角近红外补光灯。硬件控制平台采用Raspberry Pi 3 Model B。
采集数据参数设置包括摄像头模组的镜头和近红外补光灯与岩土样品的距离,为48 cm。通过USB摄像头的SDK控制摄像头的白平衡、曝光等参数保持不变。
4.2 实验过程
取完全干燥条件下质量为M1的岩土,将其放在质量为M0的不锈钢容器里。用量杯盛取一定质量的清水加入该岩土中使其过饱和,然后搅拌均匀使岩土充分吸收水分,再将其放入真空干燥箱中进行烘干。平均每烘干5 min后对盛有岩土的容器称得一次质量并放在实验箱内的平台上拍摄一次该湿度下的图像数据。每次烘干后称得的质量为M2,重复该实验过程直至岩土完全干燥,对其他2种岩土重复上述实验过程。
岩土的湿度公式为:

在模拟实验环境下通过上述方法采集到的数据见表1所列。
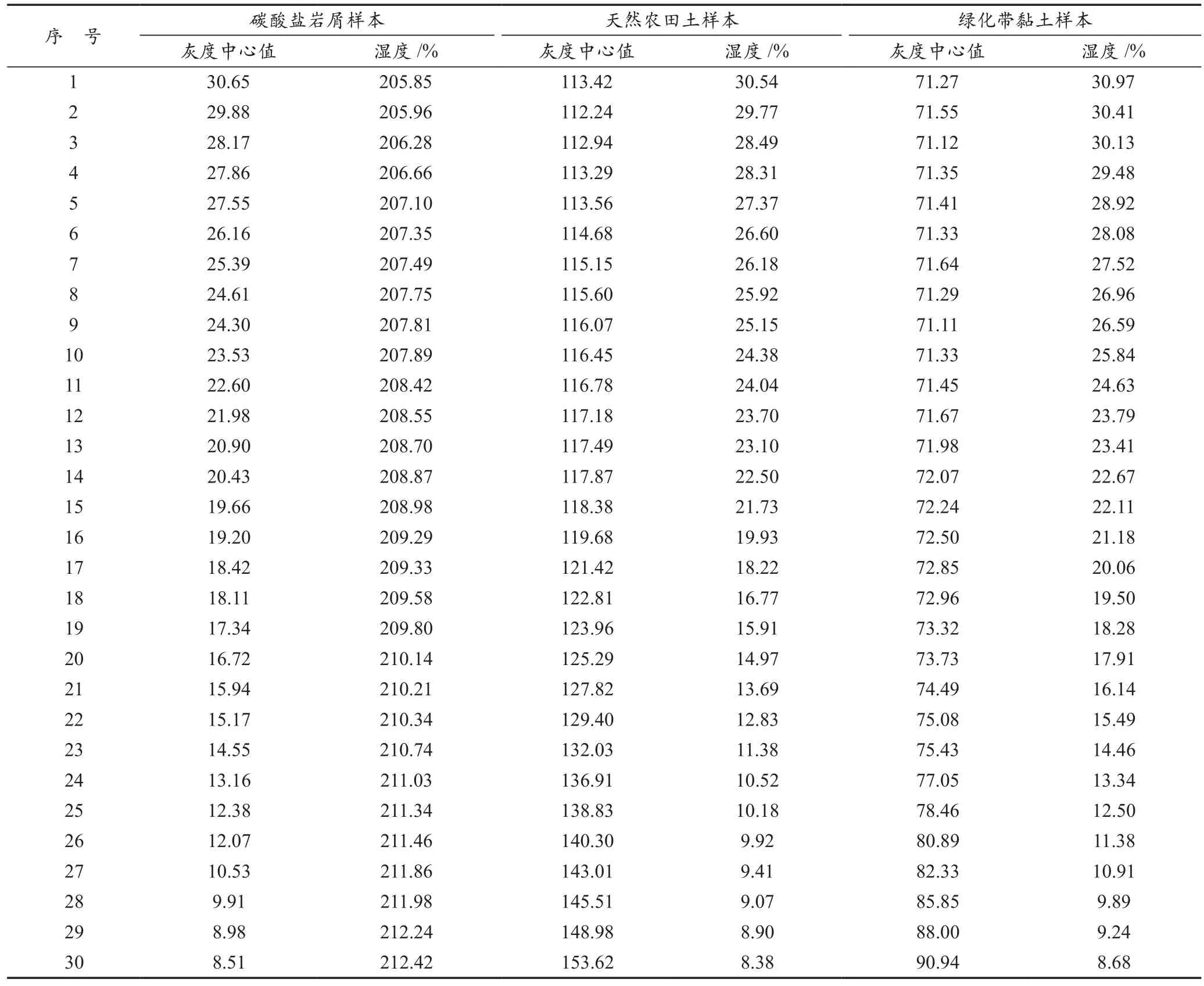
表1 岩土湿度与岩土图像的灰度中心值
4.3 实验结果与讨论
4.3.1 灰度特征曲线
不同类别岩土的图像灰度中心值随其对应的湿度变化曲线如图5所示。通过图5可以看出,图像灰度中心值随湿度的变化趋势近似线性;但是不同类别岩土在每个湿度下对应的灰度中心值不同,且灰度值随湿度变化的斜率不同,反映了不同类别岩土的近红外特性不同。产生这种差异的影响因素比较多,如化学成分的组成和含量不同、对水分的吸收能力不同等。
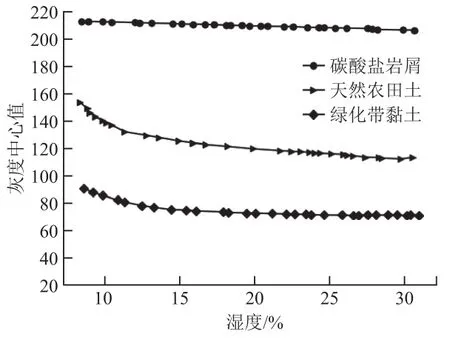
图5 岩土像素点的灰度中心值随其湿度的变化曲线
根据岩土湿度与灰度中心值的对应关系,本文建立了岩土湿度与拍摄图像中岩土的灰度中心值之间的分段线性回归模型。除此之外,为了对低湿度进行及时且准确的检测,将岩土湿度分为2个类别来提升低湿度下的预测准确率,其模型为:
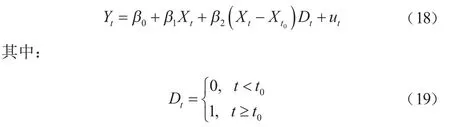
式中,t0代表划分高湿度与低湿度临界点的灰度值。在t处于不同的灰度值时,Y的期望值分别为:
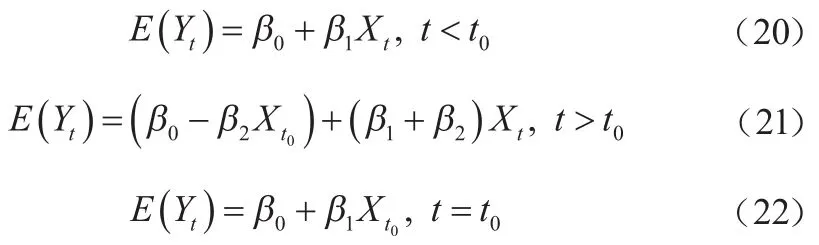
该模型的损失函数定义为:

模型的参数估计值为:

式中,β={β0,β1,β2}。
4.3.2 分段线性回归
实验中将采集的不同类别岩土在不同湿度下的30组数据,以13%的湿度为分界线分为高湿度和低湿度2类,其中每类分为4个子集进行4折交叉验证,得到如图6所示的对比图。
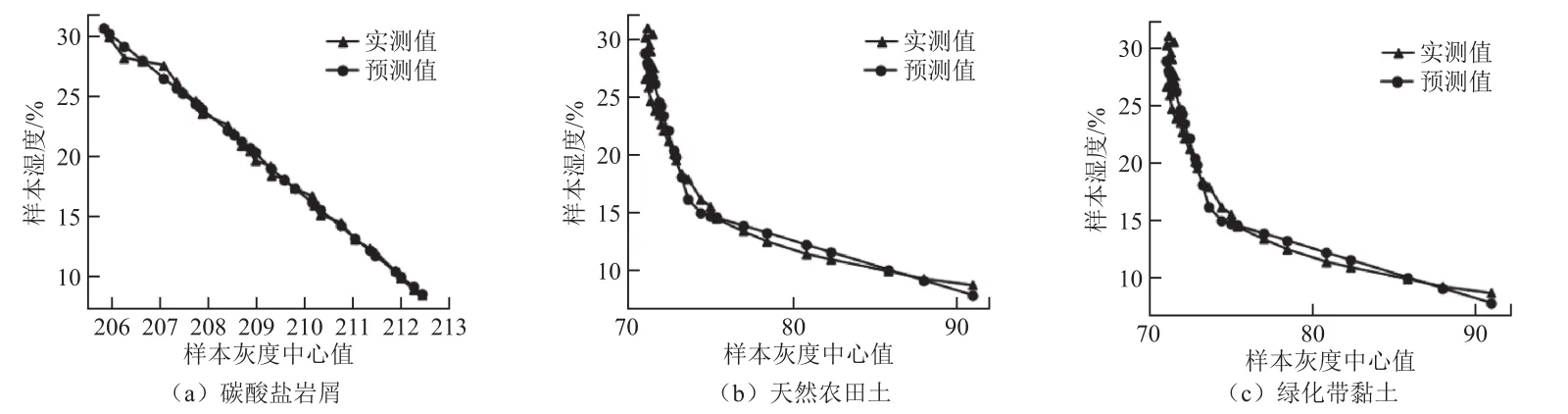
图6 不同类别岩土在交叉验证下的湿度实测值与预测值对比
本文使用湿度的平均绝对误差来衡量系统的准确性,平均绝对误差MAD表示为:

式中:N为训练样本的个数;Tp(i)表示样本的预测湿度值;Tf(i)表示样本的实测湿度值。
由式(25)计算出岩土湿度模型的误差见表2所列。
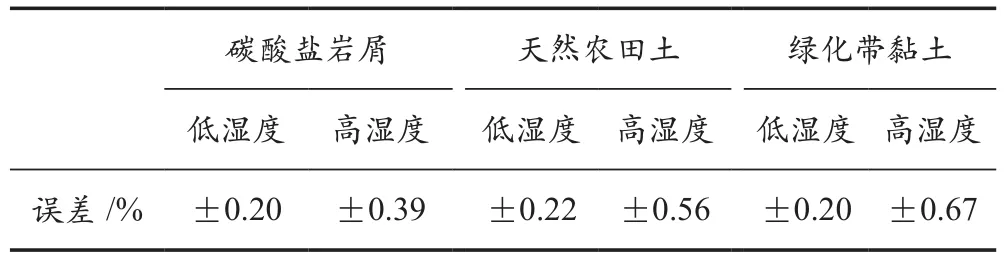
表2 岩土湿度模型的误差
通过对比实验,得到了表2所列的不同类型岩土的识别结果,可以看出3种岩土在低湿度下的预测结果比高湿度下的预测结果更为准确。对比碳酸盐岩屑、天然农田土和绿化带黏土的实验结果,本系统对于不同产地不同类型的岩土同样具有很高的检测准确率。在实际应用过程中应该首先针对不同的岩土进行分类,然后通过建立对应岩土类别的数据库实现不同岩土湿度的预测。
4.3.3 系统测试
本系统进行快速检测测试时采用Intel i5-1135G7 CPU、Win10操作系统的PC机作为上位机,其运行效果如图7所示。
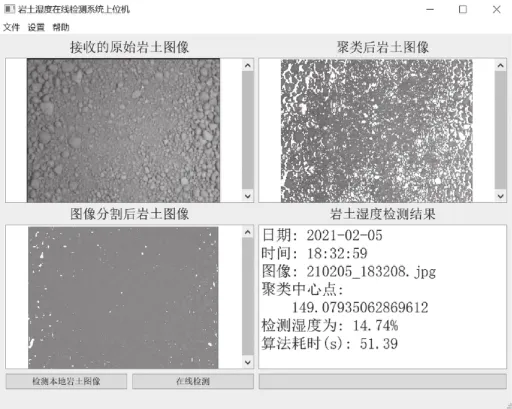
图7 系统测试上位机运行效果
通过多次的实验验证,检测得到一幅规格为800×600的图像时,各功能运行大致时间见表3所列。由表3可知,系统需要花费的总体时间约为50 s,基本满足岩土湿度快速检测的需求。
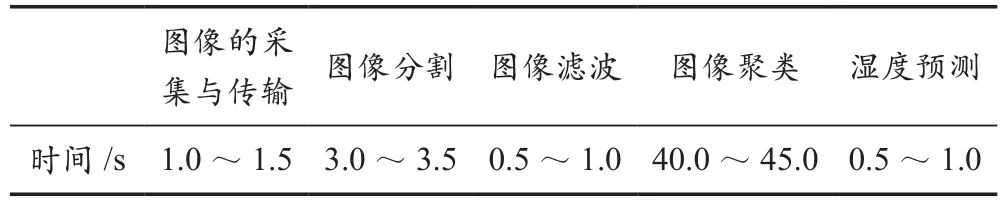
表3 系统各部分运行时间
5 结 语
本文针对岩土湿度快速检测提出了基于近红外图像的处理方法,在不同光照环境和复杂背景下具有很强的鲁棒性,针对不同类别的岩土还有很强的适应性;同时搭建了模拟环境验证了该方法的可行性,针对岩土的湿度实现了高精度测量,对于气体钻井地层出水的快速检测具有一定的参考价值。
猜你喜欢
科学大众(2023年21期)2023-12-05
中国特种设备安全(2021年9期)2021-03-02
小学生学习指导(低年级)(2019年6期)2019-07-22
测控技术(2018年9期)2018-11-25
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
时代英语·高二(2015年2期)2015-05-18
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
